- о о
Изобретение относится к обработке металлов давлением и может быть использовано для изготовления змеевиков сложной формы из длинномерных трубных плетей в производстве парогенераторов и паронагре- вателей.
Цель изобретения - расширение технологических возможностей путем обеспечения многократной отгибки концов формуемого змеевика.
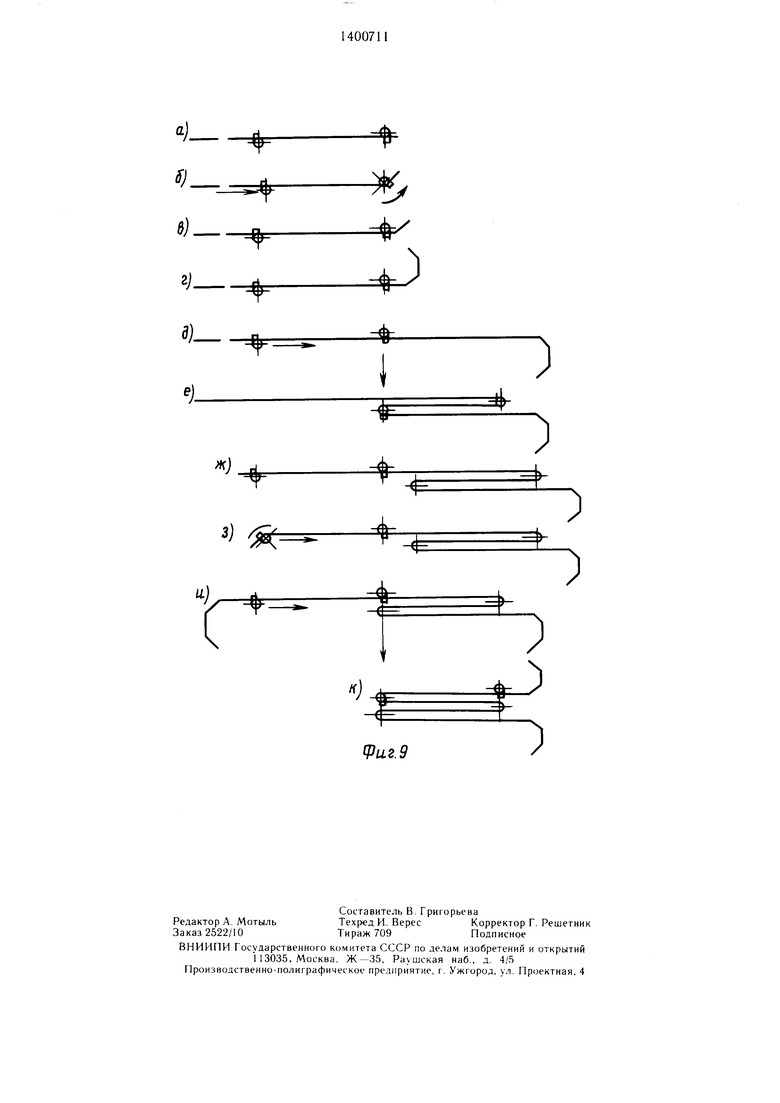
фиг. 1 изображен станок, вид; на фиг. 2 - то же, вил сверху; на фиг. 3 - разрез А-.Л на фиг . 1; на фиг. 4 - разрез Б-Г5 на фиг. 1; на фиг. 5 - разрез В-В на фнг. 1; на фиг. 6 - разрез Г-Г на фиг. 1; на фиг. 7 - разрез Д-Д на фиг. 1; на ))иг. 8 разрез Е-Н на фиг. 1; на фиг. 9 - по.ложение формуемого з.меевика в процессе раз.1ичньг стадий гибки.
(IalU)K содержит Т-образную станину 1, во взаимно перпендикулярных направляющих 2 и 3 которой с возможностью нсре.ме- нк ния смонгированы каретки 4 и суппорт о. а в 11а11)ав,ляю1иих 6 - поддерживакпцая ii. uiTa 7. На каретке 4 и сушторте 5 смонти- К) ибочпые головки 8 и 9.
Гибочпая кхювка 8 включает ва.ч-псхчу- шаблон 10, установленный с возможностью поворота в корпусе го-ловки 8. На валу-полу- пгаб.лоне смоптировапы поворотно полуобойма II и жестко поворотная плита 12 и шестерня 13, контактируюн1ая с зубчатой рей- кой 14, устаповлепной в полуобойме 11с возможностью переменке ни я.
На поЕ оротпой плите 12 установлены механизм 15 смыкания нолушаблона с валом- 11()лу|наб;1оном 10 и зажимной механизм 16.
В корпусе каретки 4 закреплен фиксатор 17 для фиксации крайнего положения ново- |)отн()й п.лпты 12.
Г ибочная головка 9 по конструкции аналогична гибочно головке 8 и включает вал- Н()лун1аблон 18, укренленный с возможнсх тью поворота в корпусе суппорта 5, на котором поворотно смонтирована нолуобойма 19, жестко - поворотная (клита 20 и шестерня 21, контактпруюшая с зубчатой рейкой 22, ус- танов,ленной в полуобойме 19 с возможностью перемещения. На гюворотной п, |ите 20 смонтированы .механизм 23 смыкания по- лун1аб,1она с валом-полун1аблоном 18 и зажимной механизм 24. В Kcjpnyce суппорта 5 закреплен фиксатор 2а для фиксации крайнего ноложения новоротной плиты 20.
В направляющем пазу 26 полуобоймы 11 подвижно смонтирован ползун 27 механизма отгибки кольца змеевика, в которо.м свободно установлена шестерня 28, контактирующая с одной стороны с зубчатой рейкой 14, а с другой - с зубчатой рейкой 29, жестко закрепленной на полуобойме 11. Зубчатая рейка 14 имеет связь с патуобоймой 19 с помошью фиксатора 30.
0
с
5
5
5
5
0
5
На гюлуобой.ме 19 жестко закреплены фиксаторы 31, периферически взаимодействующие посредством своих штоков с шестерней 28.
В направляющем пазу 32 патуобоймы 19 подвижно смонтирован нолзун 33, в котором свободно установлена шестерня 34, контактирующая с одной стороны с зубчатой рейкой 22, взаимодействующей посредством фиксатора 35 с полуобоймой 1 I и с зубчатой рейкой 36, жестко закрепленной на полуобойме 19 с другой стороны. На полуобойме 11 жестко закреплены фиксаторы 37, иериодически взаимодействующие посред ством своих штоков с шестерней 34, и фиксатор 38, периодически соединяющий полу- обой.му 11 с поворотной плитой 12.
На поддерживающей плите 7 в направляющих колоннах 39 подвижно смонтирована подъе.мная платформа 40, связанная 1иарнирно-рычажной систе.мой 41 и фиксатором 42 со штоком цилиндра 43, жестко закрепленного на плите. Нлита взаимодействует с упором 44 кронштейна 45, закрепленного на суппорте. Перемещение каретки 4 и суппорта 5 осуществляется от гидродвигателей 46 и 47.
Станок работает следующим образом.
В исходном положении перед гибкой по- лущаблоны 10 и 18 разомкнуты, зажимные механизмы 16 и 24 расфиксированы, подъемная платформа 40 опущена, поддерживающая плита 7 находится в крайнем переднем положении и соединена с кроищтейно.м 45 посредством фиксатора 42.
Для многократной отгибки первого конца трубной плети рейки 14 и 22 расфиксиро- наны; поворотная плита 12 соединена с корпусом каретки 4 посредством фиксатора 17, шестерня 28 и поворотная плита 20 расфиксированы, а штоки фиксаторов 37 выдвинуты и взаимодействуют с центральным отверстием шестерни 34.
Трубную плеть подают на необходимую величину, нроизводят зажим ее в гибочных головках 8 и 9 и смыкание полу шаблонов 10 и 18.
Включение.м гидродвигателя 47 перемещают каретку 4 на величину дуги угла f первого гиба. Нри этом ось шестерни 34 перемещается на ту же величину, сама шестерня катится по неподвижной рейке 36, рейка 22 проходит в два раза большее расстояние.
Ввиду того, что радиус шестерни 21 в два раза больше радиуса шаблона, рейка 22 производит поворот шестерни 21 (а вместе с ней вала-полушаблона 18 и поворотной плиты 20) на . Затем плеть расфикси- руют, подни.мают над плоскостью гибки, все механизмы возвращаются в исходное положение многократной отгибки и цикл повторяют необходимое количество раз в зависимости от числа гибов на конце змеевика
(фиг. 9 а, б, в, г). После этого плеть поворачивают вокруг оси на 180° и подают вперед на нужную величину.
Для формирования колена змеевика с выполнением одновременно двух гибов станок настраивают следующим образом.
Все фиксаторы на.ходятся в рабочем положении, кроме фиксаторов 31, 37 и 38. Трубная плеть подается на необходимую величину, зажимается ме.ханизмами 16 и 24, гюлуп1аблоны 10 и 18 с.мыкаются. Включением гидродвигателей 46 и 47 каретка 4 и суппорт 5 получают взаимно перпендикулярное перемещение, при этом рейка 14 обкатывается но шестерне 13, тянет за собой полу- обойму 19, а Н1естерня 21 катится по .губчатой рейке 22. Таким образо.м, поворот полуобойм на определенный угол определяет гиб- ку трубной плети на обеих гибочных гаюв- ках 8 и 9 на тот же угол. После формирования колена змеевика с выиолнением одновременно двух гибов (фиг. 9е) все .механизмы возвращаются в исходное положение.
Станок настраивается на многократную гибку второго конца з.меевика (фиг. 9 ж). При этом рейки 14 и 22 расфиксированы, новоротная плита 20 соединена с корпусом суппорта 5 посредством фиксатора 25, новоротная плита 12 расфиксирована, а щтоки фиксаторов 31 выдвинуты и взаимодействуют с центральным отверстием шестерни 28.
Трубную плеть устанавливают в ручьи полун1аблонов 10 и 18 гибочных головок 8 и 9, фиксируют ее в зажимных механизмах 16 и 24, производят смыкание полушаблонов.
Включением гидродвигателя 47 перемешают каретку 4 на величину дуги ymatf первого гиба. При этом ось шестерни 28 перемещается на эту же величину, а сама шестерня 28 катится по неподвижной рейке 29. Рейка 14 при этом совершает в два раза большее пере.мешение и поворачивает шестерню 13, а вместе с ней и вал-полушаблон 10 с поворотной плитой 12 на угол V. Затем плеть разжимается, поднимается над плоскостью гибки, все механизмы возврап1а- ются в исходное положение многократной отгибки и цикл повторяется до полного формирования конца змеевика (фиг. 9 и).
Последняя операция - отгибка концевой ветви змеевика в сторону нача, ветви.
Фиксаторы 25, 37 и 38 находятся в рабочем положении (нггоки выдвинуты), а ос - тальные - в холосто.м (штоки втянуты). Концевая ветвь змеевика фиксируется в гибочных головках 8 и 9, полушаблоны смыкаются. Включением гидродвигателей 47 и 46 каретка 4 и суппорт 5 получают взаимно перпендикулярное пере.мещение. При этом рейка 22 обкатывается вокруг шестерни 21 и врашает пГестерню 34, которая катится по неподвижной рейке 36. Ось шестерни 34,
связанная с полуобоймой 11, при этом п(хчу- чает перемещение, в два раза меньшее, чем рейка 22. Поворотная плита 12, связанная с полуобоймой 14 фиксатором 38, поворачивается вместе с ней, изгибая концевую ветвь змеевика вокруг шаблона гибочной головки 9 суппорта 5 (фиг. 9л;).
Затем осуществляются раефнксация змеевика, разъем ц аблонов, возврат всех
механизмов в исходное положение и съем готового змеевика.
Предлагаемое изобретение предназначено для использования при изготовлении плоских змеевиков различной формы и габаритов, примеияемых в конструкциях naporeiie
раторов и пароперегревателей.
Формула изобретения
Станок д.чя гибки змеевиков, содержащий станину, в направляющих которой с
0 возможностью взаимно перпендикулярного перемещения установлены каретка и суппорт, несущие гибочные головки в виде валов- полушаблонов и полушаблонов с механизмами с.мыкания, устаноВоЧенной поворотно
5 на валах-полушаблонах обоймы с направляющими, размеп1,енных в направляющих пазах обоймы зубчатых реек и смонтированных жестко на валах-полушаблонах niee- терен, а также кине.матически связанную с сунпортом подъемную платформу, отличаю0 щийся тем, что, с целью расширения технологических возможностей путем многократной отгибки концов формуемого змеевика, он снабжен установленными в обойме двумя механизмами отгибки, жестко установленными на валах-полушаблонах карет5 ки и суппорта, поворотными плитами с механизмом зажима на каждой, фиксаторами поворотных плит относительно корнусов ка- регки и суппорта соответствепно, обойма В1 п1олнена из двух полуобойм, установлен0 ных с возможностью смещения в плоскости, проходящей через валы-полушаблоны, и имеющих дополнительные направляющие и фиксатор полуобой.мы, связанной с поворотной п,читой каретки, каждый меха1щзм отгибки выполнен в виде ползуна со свободно уста- новленной на не.м шестерней с осевым отверстием, размещенного в дополнительных направляющих одной псхпуобоймь, дополнительной зубчатой рейки, установ.менной неподвижно на упомянутой полуобойме против
Q направляюп1,их пазов, взаимодействующей с упомянутой шестерней, и фиксаторов, закрепленных на другой по. П обой.ме, штоки которых устан1)влены с возможностью размещения в осево.м отверстии шестерни, а размещенные в направляющих пазах полу5 обой.мы зубчатые рейки установлены с воз- .можностью взаимодействия с упомянуты.ми шестернями и перемещения в нанравляю- щих пазах гюлуобоймы.
40
43
42 7 39

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Станок для гибки змеевиков | 1979 |
|
SU854507A1 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
| Станок для изготовления змеевиков | 1980 |
|
SU946724A1 |


Изобретение относится к обработке металлов давлением и может быть использовано для изготовления змеевиков сложной формы из длинномерных трубных плетей в производстве парогенераторов и пароперегревателей. Цель - расширение технологических возможностей путем обеспечения многократной отгибки концов формуемого змеевика. Станок содержит два механизма отгибки, жестко установленных на валах-полушаблонах каретки и суппорта. Поворотно на ва- лах-п1аблонах установлены две полуобоймы и плиты с механиз.мами зажима на каждой. Станок снабжен также рядом фиксаторов, обеспечивающих поочередное включение и выключение элементов станка при работе. При этом производят многократную отгибку первого конца трубной плети. Затем изгибают колено змеевика и, наконец, соверп ают многократную гибку второго конца змеевика. 9 ил.
фиг. 2
20 5
JJ
J7
Фиг. 6
(риг.8
Фиг. 7
;
S)
&)-.
2J
- /
fPu2.9
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
