Изобретение относится к ленточны конвейерам с гибкими роликоопорами, а именно к устройствам для контроля натяжения гибкого, орггша на переходной секции горнорудных машин, например перегружателей, отвалообразо вателей и т.п.
Цель изобретения - повьшение долвечности конвейера, путем обеспечения регулирования натяжения гибкого
органа.
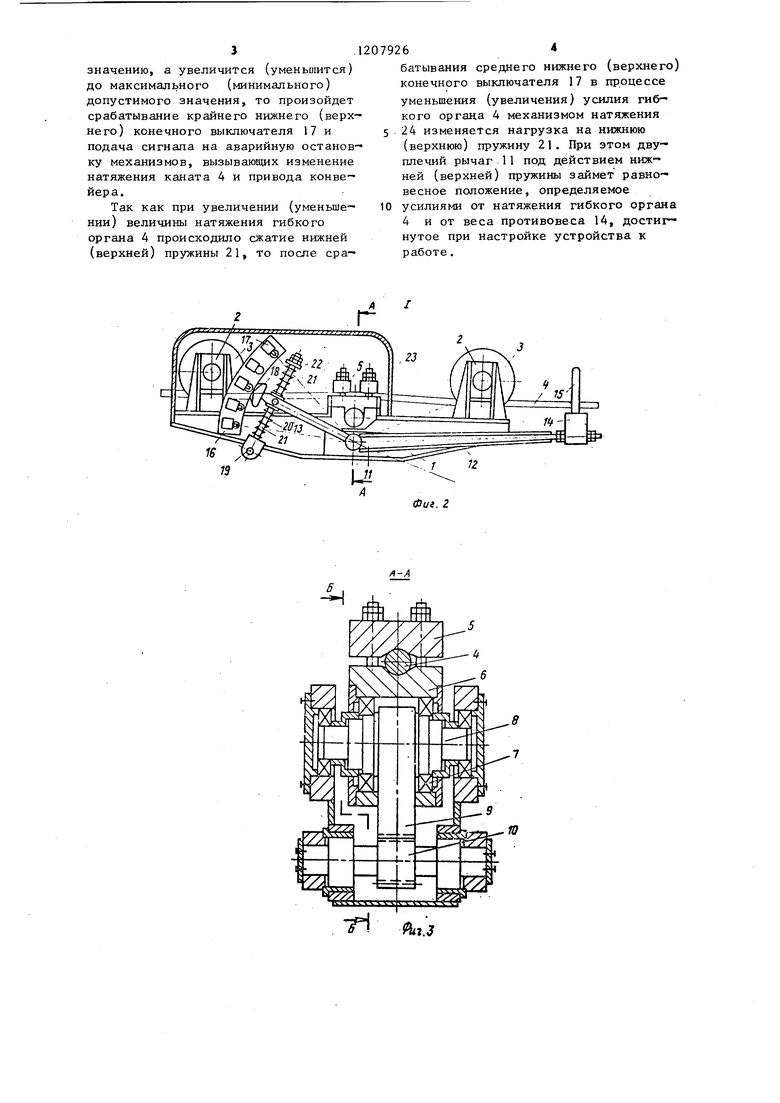
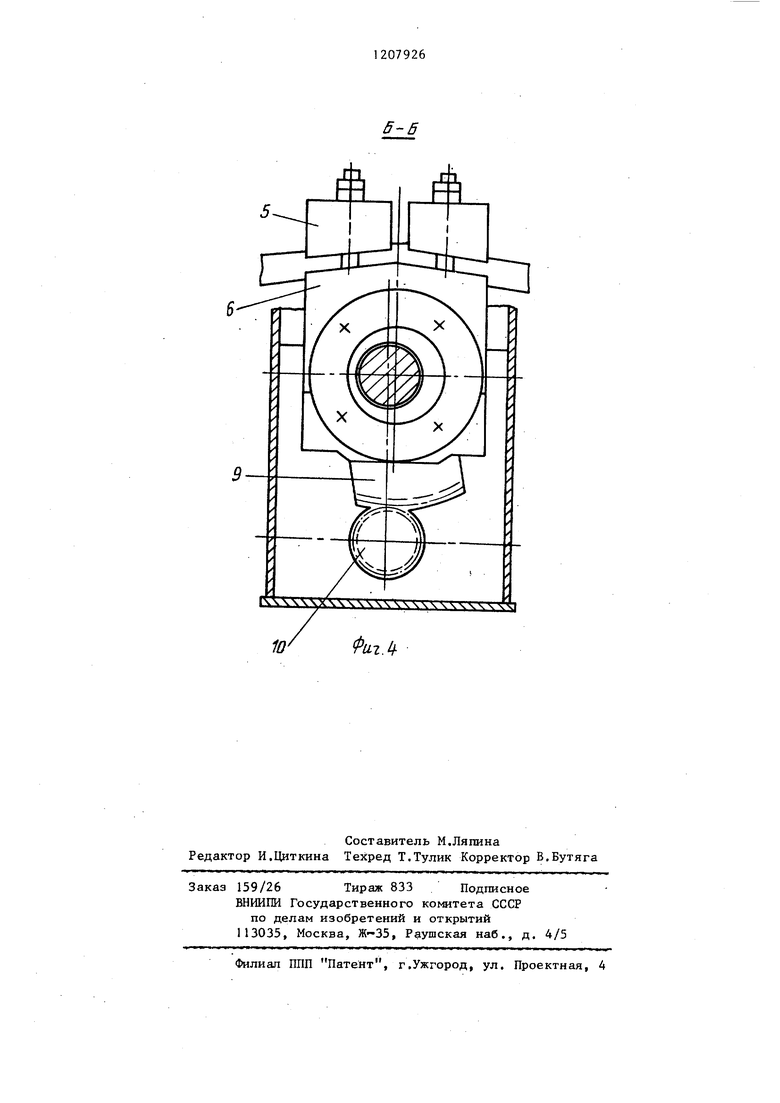
На фиг.1 изображена общая компоновка переходной секции конвейера на консолях с местом установки предложенного устройства; на фиг.2 - узел 1 на фиг.1 (предлагаемое устройство, общий вид); на фиг.З - разрез А-А на фиг.2; на фиг.4 - разрез Б-Б на фиг.З,
Устройство дня контроля натяжени гибкого органа содержит корпус 1, на котором размещены два кронштейна 2 с блоками 3. Между блоками 3 пропущен гибкий орган 4, например кана Устройство закреплено на канате 4 при помощи планок 5 и нажимной вилки 6, которая опирается через подшипники 7 на эксцентриковый вал 8. На эксцентриковом валу 8 имеется зубчатый сектор 9, который связан с валом-шестерней 10. На оси вала- шестерни 10 жестко закреплен двуплечий рычаг 11 с плечами 12 и 13. На плече 12 двуплечего рычага 11 закреплен противовес 14 с возможностью перемещения на определенное расстояние вдоль рычага. Дпя удоб- ства снятия и навешивания противове имеет арку 15.
На корпусе 1 зак зеплен исполнительный механизм 16, на котором установлено пять конечных выключателей 17 (один центральный, два средних и два крайних). На плече 13 двуплечего рычага 11 закреплена линейка 18, которая служит для взаимодействия с конечными выключа-
телями 17.
. Внизу к корпусу 1 при помощи оси 19 прикреплена тяга 20, на которую надеты верхняя и нижняя пружины 21, опиракндиеся одни концом на двуплечий рычаг 11, а другим - на опорные плоскости проушины тяги 20 и закрепленного на ней стакана 22. После настройки и опробывания
.устройства весь механизм закрывается кожухом 23 от попадания пыли и влаги.
Устройство для контроля натяжения гибкого органа работ ает следующим образом.
Производится настройка устройства. Для этого двуплечий рычаг 11 устанавливается в положение равновесия, соответствующее номинальному натяжению каната 4, при- помощи перемещения противовеса 14 вдоль рычага. При этом линейка 18 должна воздействовать на центральный конечный выключатель 17, а пружины 21 имеют одинаковое начальное сжатие .
При изменениях угла наклона консолей и при включениях механизма 24 натяжения изменяется усилие в канате 4. Устройство допускает работу конвейера горнорудной машины
при номинальном значении натяжения каната 4 и при изменении величины натяжения до максимального (минимального) рабочего значения, а при возрастании (уменьшении) усилия до
допустимого максимального (минимального) значения подает сигнал на аварийное отключение приводов механизмов 24 натяжения каната 4, механизмов наклона консолей и конвейера.
При увеличении (уменьшении) номинального усилия канат 4 выпрям.- ляется (изгибается) между блоками 3 и воздействует через нажимную вилку 6 на эксцентриковый вал 8, поворачивая закрепленный на нем сектор 9 и входящую с ним в зацепление вал- шестерню 10, Бместе с вал-шестерней
10поворачивается двуплечий рычаг
11и сжимается нижняя (верхняя) пружина 2I.
При достижении максимального (минимального) рабочего усилия натяжения каната 4 срабатывает средний нижний (верхний) конечный выключатель 17, и подается сигнал на уменьшение (увеличение) усилия натяжения гибкого органа механизмом 24 натя- жения. Вследствие этого двуплечий рычаг 11 под воздействием нижней
(верхней) пружины 21 возвращается в положение равновесия и после взаимодействия линейки 18 с центральным конечным выключателем 17 подается сигнал на выключение механизма 24 натяжения.
Если при срабатывании средних конечных выключателей натяжение каната 4 не изменится к номинальному
значению, а увеличится (уменьшится) до максимального (минимального) допустимого значения, то произойдет срабатывание крайнего нижнего (верхнего) конечного выключателя 17 и подача сигнала на аварийную остановку механизмов, вызывающих изменение натяжения каната 4 и привода конвейера.
Так как при увеличении (уменьшении) величины натяжения гибкого органа 4 происходило сжатие нижней (верхней) пружины 21, то после сра7926
батывания среднего нижнего (верхнего) конечного выключателя 17 в процессе уменьшения (увеличения) усилия гибкого органа 4 механизмом натяжения 5 24 изменяется нагрузка на нижнюю (верхнюю) пружину 21. При этом двуплечий рычаг 11 под действием нижней (верхней) пружины займет равновесное положение, определяемое 10 усилиями от натяжения гибкого органа 4 и от веса противовеса 14, достигнутое при настройке устройства к работе.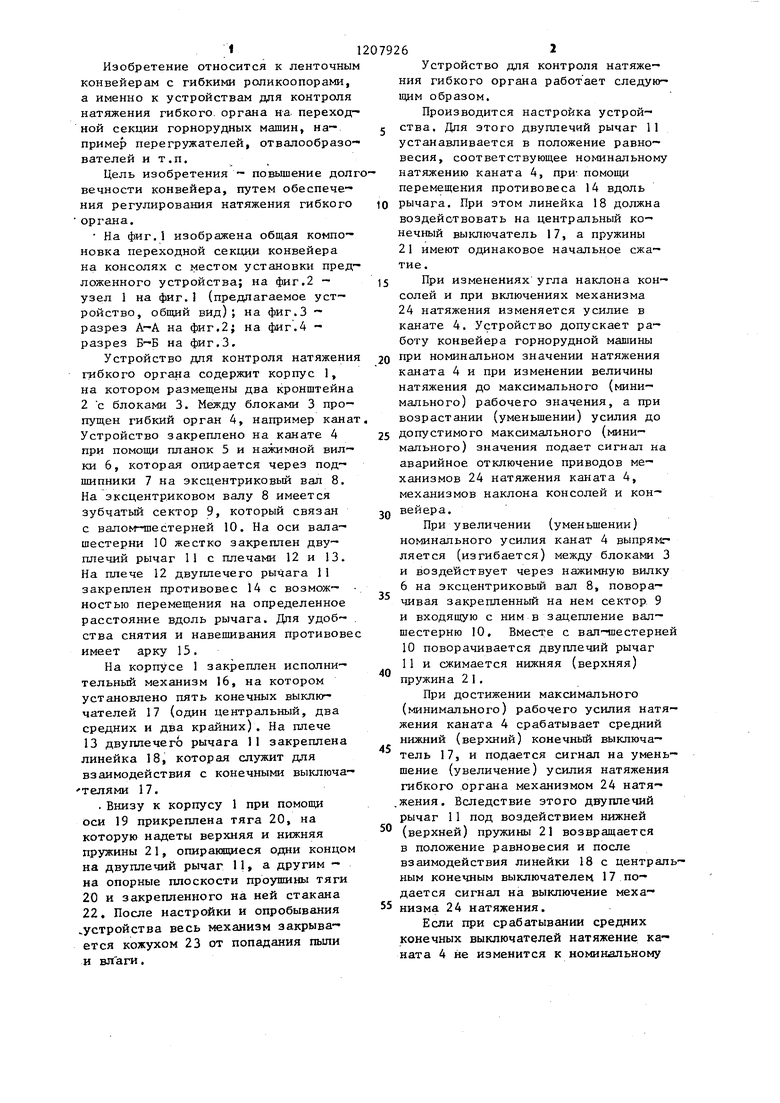
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1990 |
|
SU1740311A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Натяжное устройство тяговых органов конвейеров | 1989 |
|
SU1712272A1 |
| МОСТОВОЙ КРАН | 1969 |
|
SU247482A1 |
| Механизм стопорения грузовой каретки строительного подъемника | 1987 |
|
SU1474063A1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2145568C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| Цилиндрический дозатор | 1962 |
|
SU152421A1 |
| Механизм управления клещами стрипперного крана | 1981 |
|
SU977110A1 |
| Стенд для испытания грузозахватных устройств | 1991 |
|
SU1789488A1 |

13
Ю
г.З
ФигЛ
| СПОСОБ КОНТРОЛЯ НАТЯЖЕНИЯ ТЯГОВОГО ОРГАНА НА ПРЯМОМ УЧАСТКЕ ПОДВЕСНОГО КОНВЕЙЕРА | 0 |
|
SU385853A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
| Ограничитель грузоподъемности для кранов | 1974 |
|
SU564251A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
