Изобретение относится к железнодорожному транспорту и касается устройства для расцепления железнодорожных вагонов.
Цель изобретения - повышение надежности работы и расп ирение функциональных возможностей.
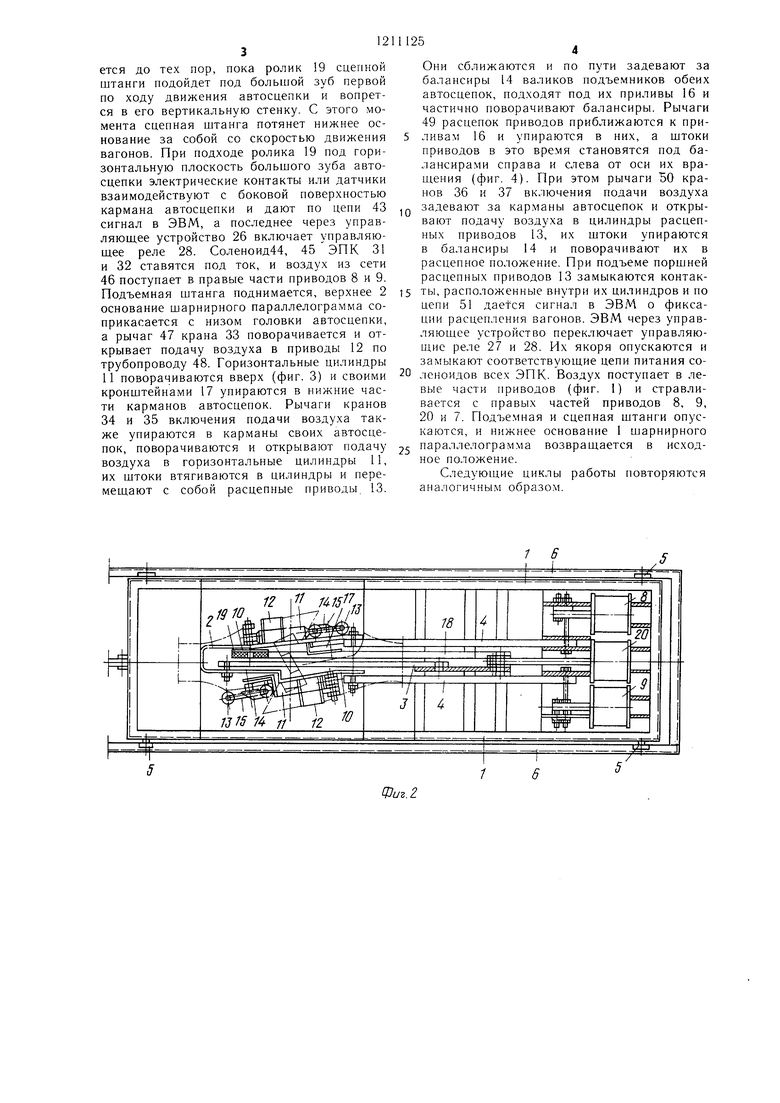
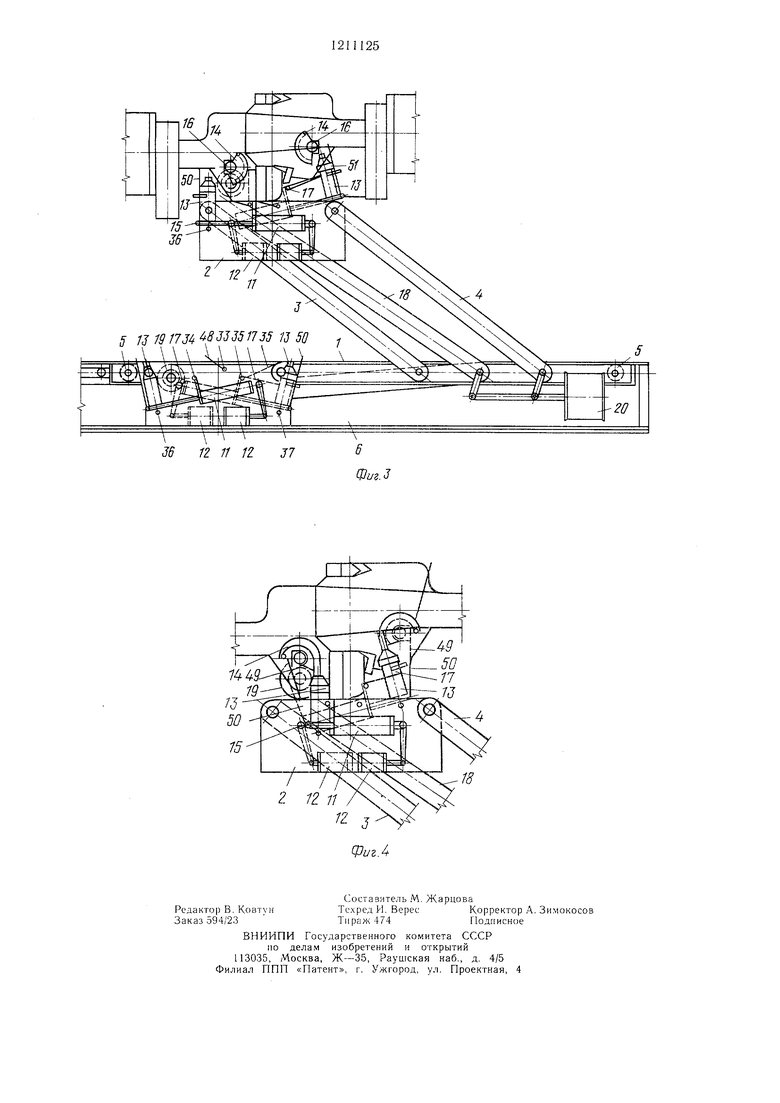
На фиг. 1 показано устройство в ходном и рабочем положениях и система управления, вид сбоку; на фиг. 2 - устройство с изображением контура головок автосцепок, вид сверху; на фиг. 3 и 4 - фазы взаимодействия захватно-расцепных механизмов с головками автосцепок в начале и в конце расцепления соответственно.
Устройство состоит из подъемной штанги, захватно-расцеиных механизмов, сцепной штанги, приводов подъема штанг и системы управления. Подъемная HiTaiira 1эыполиена в виде шарнирного параллелограмма, состояпдего из нижнего 1 и верхнего 2 оснований, шарнирно соеди1.;енных меж,:1у собой ры чагами 3 и 4. Мижнее основание подвижно укреплено на пути с помощью роликов 5, размешенных в направляющих рамы 6, и связано с приводом 7, расположенным по оси пути. Верхнее 2 основание шарнирного нарал-лелограмма вьшолне- но в виде Г1-образной рамы, развернутой евоей открытой стороной навстречу движению вагонов. Рычаги 4 под ьемной штанги связаны с приводами 8 и 9, расположенными на нижнем основании шарнирного наралле;1ограмма.
Захватно-расцепной механизм, взаимодействующий с первой но ходу движения автосцепкой, расположен на передней стороне 10 П-образной рамы верхнего 2 основания 1царнирн01 о нарал,:елограмма и состоит из горизонтального цилиндра 11. привода 12 и расценного привода 13. Горизонтальный цилиндр 11 шарнирно закреплен на передней стороне 10 П-образной рамы, расноложен под балансиром 14 валика подъемника автосцепки и ориентирован вдоль его вертикальной плоскости. К штоку 15 горизонтального цилиндра 11 жестко прикреплен расцеппой привод, ориентированный вверх и расположенный спереди балансира 14 и по уровню ниже его нри- лива 16. Горизонтальный цилиндр снабжен кронштейном 17, ограничивающим угол его поворота. Захватно-расцепной механизм, взаимодействующий с второй но ходу движения автосценкой, расположен на задней стороне 10 П-образной рамы и имеет аналогичную конструкцию с захватно-расцеп- ным механизмом, взаимодействуюпдим с первой по ходу движения автосцепкой.
Сцепная штанга, содержащая рычаг 18 и ролик 19, расноложена между рычагами 3 и 4 шарнирного нараллелограмма, 1нарнир- но закреплена на нижнем 1 основании и связана с приводом 20.
Верхняя часть рычага 18 и ролик 19 свободно нроходят между продольными сторонами П-образной рамы.
Система унравления состоит из путевых магнитных педалей 21 устройства 22 со- пряжения, электронно-вычиелительной машины (ЭВМ) микропроцессора или ГАЦ 23 видеотерминала 24, управляющих устройств 25 и 26, управляющих реле 27 и 28 электропневматических клапанов (ЭПК) 29-32, контактов фиксации расцепления сети трубопроводов и электрических цепей, кранов 33-
37включения подачи воздуха, регуляторов
38и 39 давления воздуха.
С помощью таки. цепей выходы от путевых магнитных недалей и контактов фиксации расцепления вагонов соединены через устройство сопряжения е ЭВМ, а управляющие устройства с одной стороны включены в цепи питания управляющих реле, через коптакты которых включены цепи питания
соленоидов ЭГ1К, а с другой - соединены с ЭВМ.
Устройство работает следующим образом. При поступлении состава в расформирование посредством видеотерминала 24 и устройства 22 сопряжения вносится в ЭВМ
(микропроцессор или ГАЦ 23) ипформация о разложении состава. Затем состав надвигается на горку. Тележки вагонов проходят магнитные педали 21, электросигналы от них поступают в устройство 22 сопряжения, где они преобразуются в соответствующие
коды, и далее поступает в ЭВМ, где счет- 1:0-рещаюплее устройство сравнивает данные о количестве прошедщих ва1 онов через путевые магнитные педали и введенной в ЭВМ информации о разложении состава. При совпадении данных о первом, втором и т. д. отцепках ЭВМ соответствующим кодом через устройство сопряжения возбуждает управляющее устройство 25, а последнее ставит под ток управляющее реле 27. Якорь реле притягивается, замыкает фронтальный контакт и включается цень питания соленоидов 40 и 41 ЭПК 29 и 30, и воздух из сети 42 поступает в правые части привода 20 сцепной штанги и привода 7, а с левых частей этих приводов воздух стравливается в атмосферу. Поршни приводов 20 и 7 перемещаются влево, сцепная штанга поднимается, а нижнее основание 1 шарнирного параллелограмма благодаря регулятору давления 39, унравляемого ЭВМ, перемещается вдоль пути в сторону движения вагонов
с такой скоростью, при которой обеспечивается надежное сцепление сцепной щтанги с автосцепкой. Эта скорость выбирается ЭВМ и через управляющее устройство 26 задается регулятору 39 давления воздуха, в результате сцепление с автосцепкой осуществляется примерно с одинаковой относительной скоростью, например 3-4 км/ч. Такая скорость движения нижнего основания 1 н.шрнирного параллелограмма осуществля
ется до тех пор, пока ролик 19 сцепной штанги подойдет под большой зуб первой по ходу движения автосцепки и вопрется в его вертикальную стенку. С этого момента сцепная штанга потянет нижнее основание за собой со скоростью движения вагонов. При подходе ролика 19 под горизонтальную плоскость большого зуба автосцепки электрические контакты или датчики взаимодействуют с боковой поверхностью кармана автосцепки и дают по цепи 43 сигнал в ЭВМ, а последнее через управляющее устройство 26 включает управляющее реле 28. Соленоид44, 45 ЭПК 31 и 32 ставятся под ток, и воздух из сети 46 поступает в правые части приводов 8 и 9. Подъемная штанга поднимается, верхнее 2 основание шарнирного параллелограмма соприкасается с низом головки автосцепки, а рычаг 47 крана 33 поворачивается и открывает подачу воздуха в приводы 12 по трубопроводу 48. Горизонтальные цилиндры 11 поворачиваются вверх (фиг. 3) и своими кронштейнами 17 упираются в нижние части карманов автосцепок. Рычаги кранов 34 и 35 включения подачи воздуха также упираются в карманы своих автосцепок, поворачиваются и открывают подачу воздуха в горизонтальные цилиндры 11, их штоки втягиваются в цилиндры и перемещают с собой расцепные приводы. 13.
Они сближаются и по пути задевают за балансиры 14 валиков подъемников обеих автосцепок, подходят под их приливы 16 и частично поворачивают балансиры. Рычаги 49 расценок приводов приближаются к приливам 16 и упираются в них, а штоки приводов в это время становятся под балансирами справа и спева от оси их вращения (фиг. 4). При этом рычаги 50 кранов 36 и 37 включения подачи воздуха
задевают за карманы автосцепок и открывают подачу воздуха в цилиндры расцеп- ных приводов 13, их штоки упираются в балансиры 14 и поворачивают их в расцепное положение. При подъеме поршней расцепных приводов 13 замыкаются контакты, расположенные внутри их цилиндров и по цепи 51 дaefcя сигнал в ЭВМ о фиксации расцепления вагонов. ЭВМ через управляющее устройство переключает управляю- реле 27 и 28. Их якоря опускаются и замыкают соответствующие цепи питания соленоидов всех ЭПК. Воздух поступает в левые части приводов (фиг. 1) и стравливается с правых частей приводов 8, 9, 20 и 7. Подъемная и сцепная штанги опускаются, и нижнее основание 1 шарнирного
параллелограмма возвращается в исходное положение.
Следующие циклы работы повторяются аналогичным образом.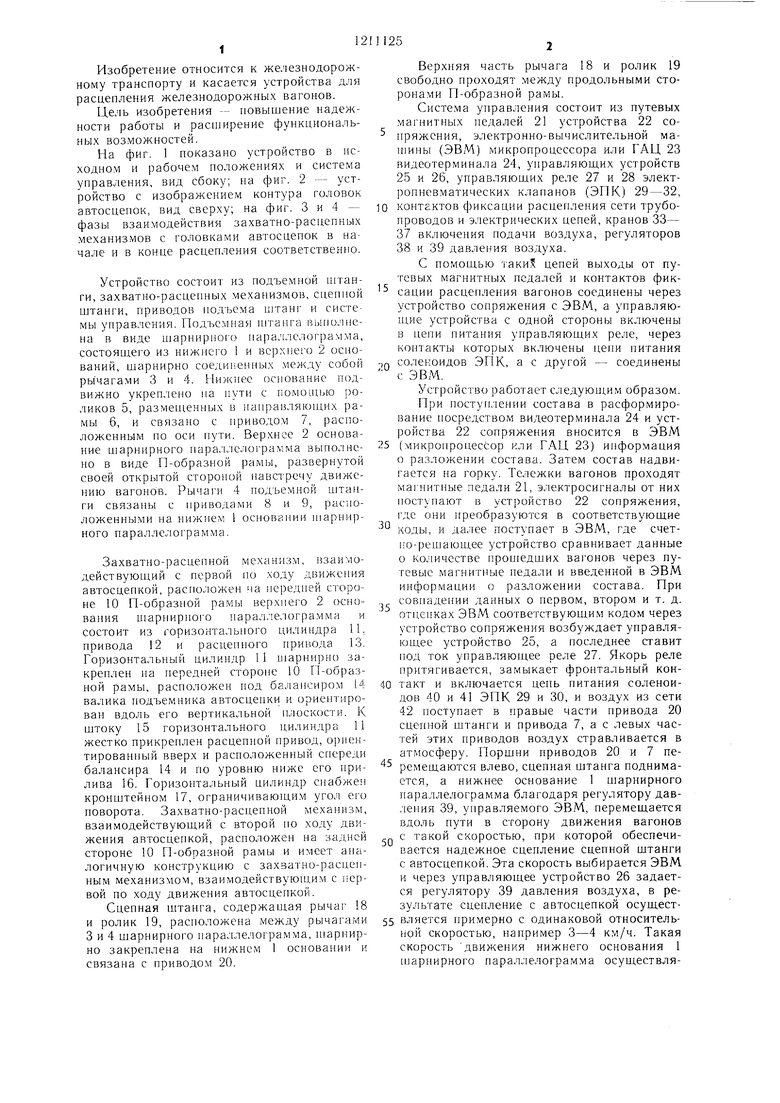
| название | год | авторы | номер документа |
|---|---|---|---|
| Напольное устройство для автоматического расцепления единиц подвижного железнодорожного состава | 1982 |
|
SU1084164A2 |
| Напольное устройство для автоматического расцепления единиц железнодорожного подвижного состава | 1981 |
|
SU1022848A1 |
| Устройство для расцепления железнодорожных вагонов | 1989 |
|
SU1650505A1 |
| Устройство для автоматического расцепления вагонов | 1981 |
|
SU1232545A1 |
| Устройство для автоматического расцепления вагонов на сортировочной горке | 1973 |
|
SU901124A1 |
| Устройство для автоматического расцепления единиц железнодорожного подвижного состава | 1984 |
|
SU1404390A1 |
| Устройство для автоматического расцепления вагонов | 1981 |
|
SU1052436A1 |
| Устройство автоматического расцепления железнодорожных вагонов | 1989 |
|
SU1766749A1 |
| Устройство для дистанционного управления напольным механизмом автоматического расцепления железнодорожного подвижного состава | 1980 |
|
SU878632A1 |
| Устройство для расцепления железнодорожных вагонов | 1981 |
|
SU960059A1 |

7 6
18
3
16
36 12. 11 TL J7
G Фиг.З
15
Составитель М. Жарцова
Техред И. ВересКорректор А. Зимокосов
Тираж 474Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Напольное устройство для автоматического расцепления единиц подвижного железнодорожного состава | 1982 |
|
SU1084164A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
