t
Изобретение относится к области автоматизации технологических процессов, а именно к манипуляторам, тре- бующим значительного количества точек позиционирования.
Цель, изобретения - расширение технологических возможностей за счет обеспечения различных по величине шаговых перемещений..
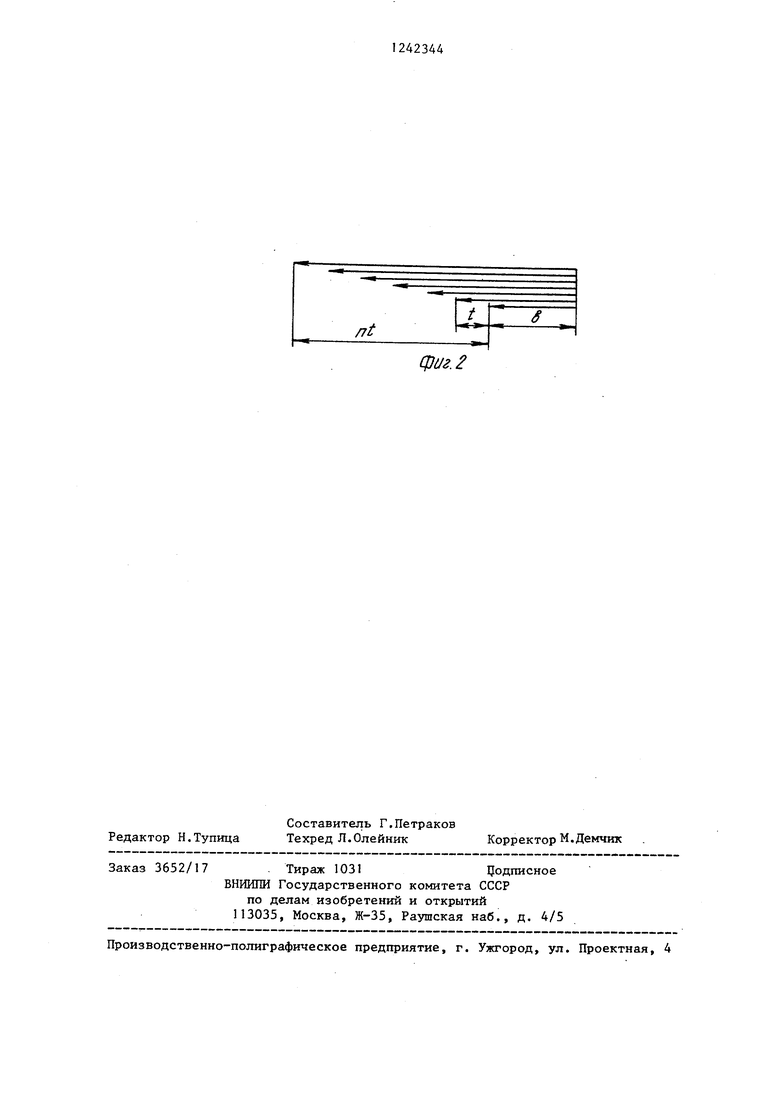
На фиг.1 изображен манипулятор, общий вид; на- фиг,2 - траектория перемещения манипулятора.
Манипулятор состоит из корпуса 1, в котором смонтирован .силовой цилиндр 2, внутри которого перемеодает- ся поршень 3 с штоком 4. Шток 4 посредством фланцев 5 и 6 жестко связан с рейкой 7. Рейки 7, 8 и 9 находятся S зацеплении с шестернями Ю 11 и 12 соответственно, которые жестко связаны между собой и образуют блок, установленный на оси 13, Рейка 8 закреплена на штанге 14, которая представляет собой руку манипулятора и на конце которой расположен схват 15. Внутри рейки 9 находится подвижный регулируемый упор 16, который взаимодействует с переставным упором в виде кулачка 17, выполненным, например, в виде одновитковой улитки по спирали Архимеда с постоянным шагом. В исходном пололсении между образующей поверхностью кулачка 7 и .я упора 16 имеется расстояние С(., от которого зависит расстояние & (фиг,2) первоначального перемещения штанги 14, которое регулируется независимо от регулировки шага t, и соответствует, например, расстоянию от накопителя деталей до ряда укладки их в : кассету. Кулачок 17 жестко связан с храповым колесом 18, с которым взаимодействует собачка 19, которая закреплена на зубчатом колесе 20, находящемся в зацеплении с шестерней 10. Длина делительной окружности зубчатого колеса 20 должна быть равна длине хода порщня 3. Собачка 19, а следовательно, и зубчатое колесо 20 шеют ограничительный угол с. взаимодействия с храповым колесом 18, который регулируется стержнем 21. От угла о( зависит шаг t перемещения штанги I4 со схватом 15. Кулачок 17, храповое колесо 18 и зубчатое колесо 20 установлены на оси 22, фиксатор 23 установлен в Kopnj -ce 1 и служит ддш фиксации кулачка 17 при возврате зубчатого колеса 20 в исходное поло10
15
20
423442
жение. Для изменения выдвижения штанги 14 на ней имеется ограничитель 24, который настраивается вращением винта 25, а между щестернями 10 и П установлена муфта 26 предельного момента. Пружина 27 удерживает собачку
19в зацеплении с храповым колесом 18. Копир 28, выполненный в виде расточки в корпусе, взаимодействует с хвостовиком собачки 9 после его взаимодействия со стержнем 21.
Манипулятор работает следующим образом.
Подвижным зтором 16 и регулировкой стержня 21 устанавливают необходимое расстояние И. и угол поворота ( , соответствующие перемещениям В и t штанги 14.
Затем рабочее тело подается в правую полость силового цилиндра 2. Поршень 3 с штоком 4 и рейкой 7 начинают перемещаться, и блок из шестерен 10-12 :аоворачивается. Перемещается штанга 14, которая выдвигается на 25 настроенное расстояние вместе с движением рейки 7 до упора orpai-шчителя 24 во фланец 6. Рейка 9 с упором 16 перемещается до взаимодействия с ку- лачрсом 17. Вместе с поворотов шестерни 10 поворачивается зубчатое колесо
20с собачкой 19, а следовательно, и храповое колесо 18 с кулачком 17. После поворота зубчатого колеса 20 на угол о(. хвостовнк собачки 19 начинает взаимодействовать со стержнем
- 21 и собачка 19 выходит из зацепления с храповым колесом 18, кулачок останавливается в определегпюм положении, так как крутящий момент на храповое колесо 18 не передается при дальнейшем вращении зубчатого колеса 20. После прохождения упором 16 расстояния С{ и определенной высоты профиля кулачка 17 после поворота на угол оС он упирается в образующую по верхность кулачка 17. Схват 13 переместился в это время на расстояние D , После этого рабочее тело подается в левую полость силового цилиндра 2. Поршень 3 с штоком 4 и рейкой 7 пере - мещаются вправо. Зубчатое колесо 20 с собачкой 19, упор 16 и схваг 15 возвращаются в исходное положение. Кулачок 17 в это время не вращается. Затем снова происходит подача рабоче55 го тела в правую полость силового цилиндра 2,Цикл перемещения штанги 14 со схватом 1 Зповторяется,и схватпроходит расстояние D+ьзатем fe+ 2-Ьи т.д.
30
Редактор Н.Тупица
Составитель Г.Петраков Техред Л.Олейник
Заказ 3652/17 . Тираж 1031Цодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
/7/
/
«-
s
фиг. 2
Корректор М.Демчик
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для перфорирования и отрезки полосового и ленточного материала | 1980 |
|
SU984863A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Устройство для подачи длинномерногоМАТЕРиАлА B РАбОчую зОНу пРЕССА | 1979 |
|
SU845997A1 |
| Труборезная головка | 1987 |
|
SU1516258A1 |
| Устройство для ориентации длинномерных заготовок | 1978 |
|
SU700248A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |

| Манипулятор | 1979 |
|
SU770781A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| МАНИПУЛЯТОР, содержащий корпус и размещенные в нем руку, выполненную в виде штанги, силовой цилиндр вьщвижения руки, шток которого связанчс штангой, подвижный упор, кинематически связанный с штоком силового цилиндра и взаимодействующий с подвижным упором переставной упор, установленный в корпусе на оси, а также храповой механизм, храповое ко 7 2 28 27 лесо которого соосно оси переставного упора, отличающийся , тем, что, с целью расширения технологических возможностей за счет обеспечения различных по величине шаговых перемещений, он снабжен копиром со стержнем и зубчатым колесом, установленным на оси храпового колеса и кинематически связанным с штоком силового цилиндра, причем копир со стержнем размещен в корпусе с возможностью взаимодействия с хвостовиком собачки храпового механизма, установленной шарнирно на зубчатом колесе, при этом переставной упор выполнен в виде кулачка | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
