Изобретение относится к устройствам для перегрузки штучных грузов, содержащих манипулятор, и может найти широкое применение на предприятиях, оснащенных машинами непрерывного транспорта, и в частности - конвейерами, а также может быть использовано в области машиностроения с поточным производством.
Цель изобретения - повышение надежности работы устройства.
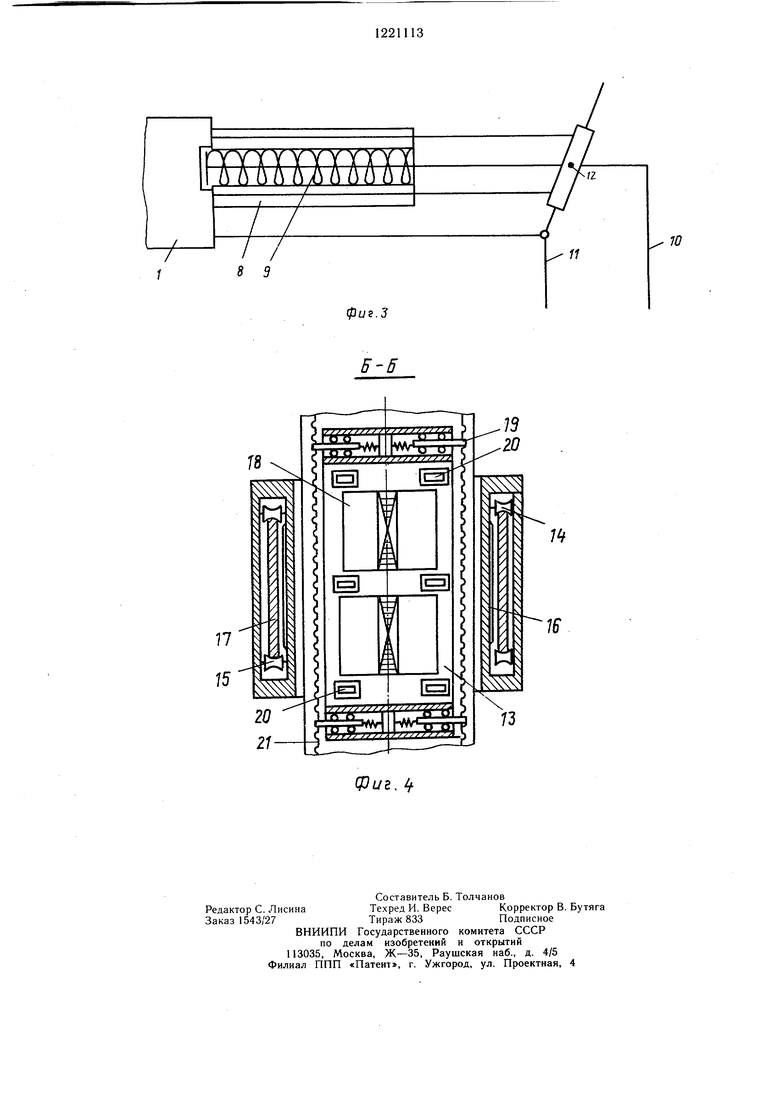
На фиг. 1 схематически изображено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - захват и его связь с рукой; на фиг. 4 - разрез Б-Б на фиг. 2.
Устройство состоит из рамы руки манипулятора 1, коробки 2 манипулятора, колонны 3, дугостаторного электродвигателя 4 и 5, тормоза 6 и опорно-поворотного приспособления 7.
На руке манипулятора (фиг. 3) расположен захват, состоящий из электромагнита 8, пружины 9 и двух щек 10 и 11, кинематически связанных подвижной связью 12, при этом щека 10 соединена с подпружиненным штоком электромагнита, а щека 11 - шарнирно с рамой руки манипулятора. Последняя жестко соединена с коробкой 2 манипулятора и механическими рамами 13 (фиг. 2).
Коробка манипулятора имеет два паза, в которых для перемещения рамы (изменения вылета) руки манипулятора закреплены четыре верхних 14, четыре нижних 15 ролика (фиг. 4) и два вертикальных индуктора линейного асинхронного двигателя (ДАД) 16, приводящих в движение раму руки 17 манипулятора.
Для подъема и опускания рамы руки манипулятора и, следовательно, коробки манипулятора относительно колонны, как указывалось ранее, коробка манипулятора жестко соединена с двумя металлическими рамами 13, несущими на себе по два индуктора линейного асинхронного двигателя ЛАД 18 и по четыре электромагнита с подпружиненными штоками 19. В качестве вторичной системы ЛАД использованы внутренние стенки колонны 3, которая выполнена прямоугольного сечения. На всю высоту подъ5
ема (опускания) коробки манипулятора на двух противоположных стенках колонны имеются вертикальные пазы, в которых размещены ролики 20, а на двух других про- тивоположных стенках колонны через 20- 25 мм нарезаны горизонтальные пазы 21 для взаимодействия со штокамн 19 на случай позиционирования коробки манипулятора. Последнее задается расстановкой внутри колонны датчиков и выключателей. Для
0 закрепления на колонне 3 диска-ротора дугостаторного электродвигателя 4 и 5 и соединения ее с опорно-поворотным приспособлением 7 в своей нижней части колонна имеет круглое сечение.
Устройство работает следующим образом. При приближении к щекам 10 и 11, захвата детали или другого штучного груза, перемещаемого конвейером, с электромагнита 8 снимается напряжение и под действием пружины 9 щеки захвата, смыкаясь, захваты0 вают деталь или другой штучный груз. Затем подается напряжение в обмотки индукторов ЛАД 18 механизма подъема коробки манипулятора и одновременно обмотки электромагнитов, управляемых штоками 19. Последние выводятся из горизон5 тальных пазов 21, и рамы 13 вместе с коробкой 2 манипулятора поднимаются (опускаются) до требуемой высоты. С целью позиционирования манипулятора в вертикальной плоскости относительно колонны 3 на рамах 13 установлены выключатели «В К.
Одновременно в случае необходимости подается напряжение в обмотки индукторов ЛАД 16, предназначенных для перемещения рамы руки 17 и, следовательно, изменения вылета руки с захватом относительно колонны 3. Поворот колонны 3 вместе с коробкой 2 манипулятора на любой угол (до 360°) осуществляется в любой момент дугостаторным электродвигателем 4 и 5, а ее фиксирование в нужной точке -
0 с помощью электромагнитного колодочного тормоза 6. Регулирование скорости всех без- редукторных механизмов предлагаемого устройства, их пуск и остановка осуществляются с помощью преобразователя частоты тока.
йиМ
ipui. 2
ешн
фиг.З
Б-б
77 Г5
IS
ГЗ
Фиг. If
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
| Виброцентробежный сепаратор | 2020 |
|
RU2739284C1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| УСТАНОВКА ДЛЯ СЪЕМА ОГНЕУПОРНЫХ ИЗДЕЛИЙ | 1973 |
|
SU364445A1 |
| Устройство для разгрузки вагонов | 1985 |
|
SU1346548A1 |
| Толкатель нормально-замкнутого тормоза | 1979 |
|
SU846876A1 |
| Привод конвейерного поезда | 1986 |
|
SU1328251A1 |
| Привод кабельного барабана | 1982 |
|
SU1059641A1 |
| Вакуумный захват | 2023 |
|
RU2814161C1 |

| Устройство для передачи штучных грузов с одного конвейера на другой | 1977 |
|
SU658044A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Перегрузочное устройство подвесного конвейера | 1982 |
|
SU1085909A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
