Изобретение относится к автоматизации штамповочного производства, а именнр к конструкциям загрузочных устройств, и может быть использовано для подготовки к захвату заготовок, загружаемых навалом.
Цель изобретения - расширение технологических возможностей за счет образования в кольцевой емкости для заготовок стоп-заготовок путем снаб- жения устройства подпружиненным основанием с ограничителями стоп-заготовок.
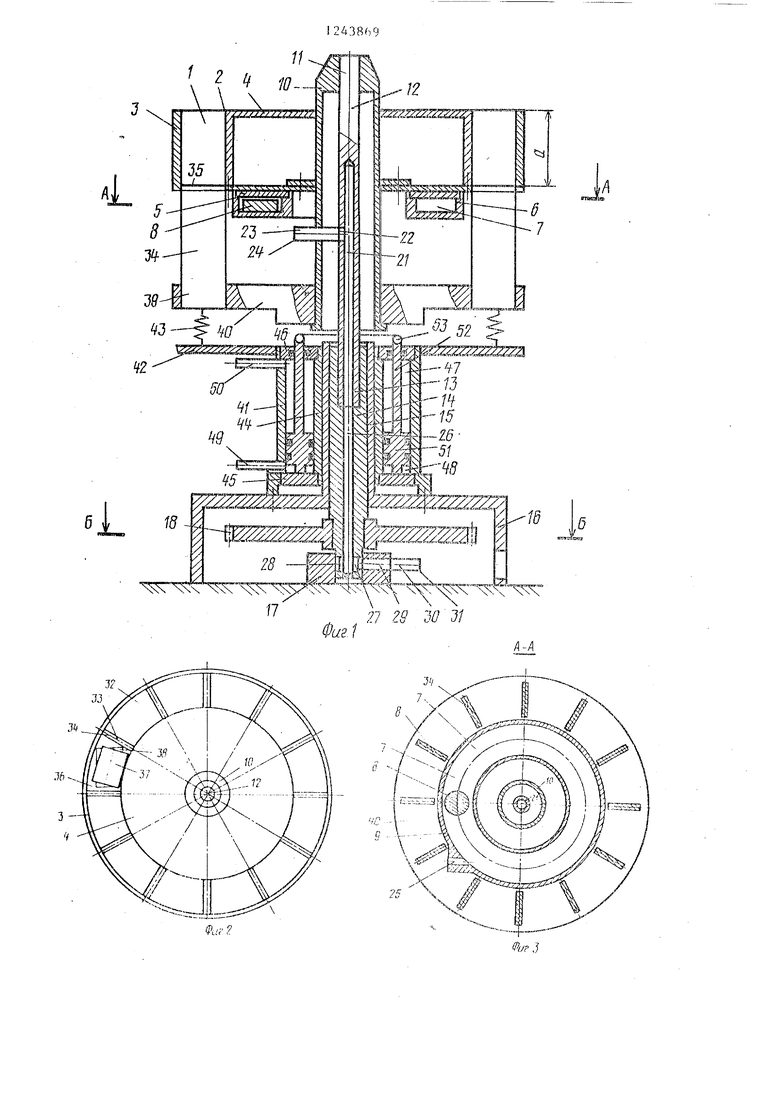
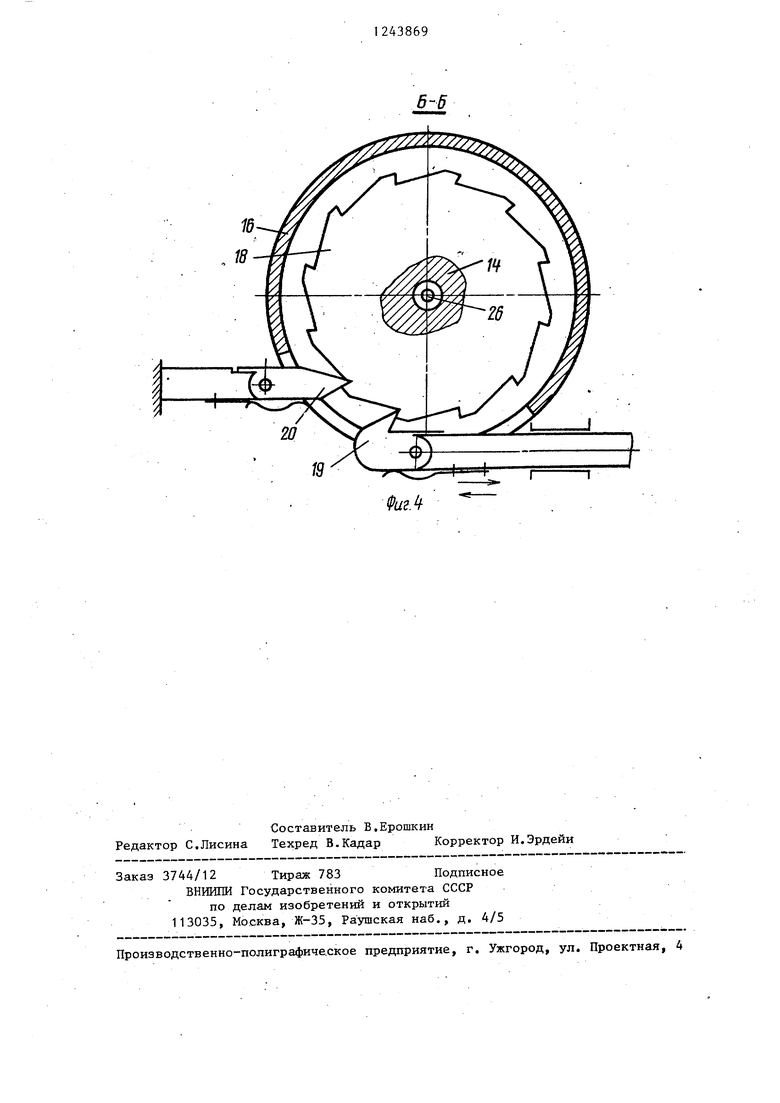
На фиг.1 схематически изображен предлагаемый загрузочный вябробункер разрез; на фиг.2 - то же, вид сверху J на фиг.З - разрез А-А на фиг,1, на фиг.4 - разрез Б-Б на фиг.1.
Загрузочный вибробункер содержит кольцевую лопасть для заготовок 1, выполненную Б- сборном корщгсе 2, состоящем из стакана 3 и меньшего стакана 4. На стакане 4 закреплен вибратор 5, представляющий собой кольцо 6 с кольцевой полостью 7, в которой с зазорами размещен диск 8. Кольцевая полость каналом 9 (фиг.З) codбщeнa с атмосферой. Стакан 4 закреплен через полую втулку 10 с верхним концом 11 гибкого стержня 12. Нижний конец 13 гибкого стержня закреплен на валу 14, имеющим возможность поворота в отверстии 15 станины 16 и опирающимся на бобышку 17, закрепленную на станине. На валу закреплено храповое колесо 18, входящее в зацепление с ведущей собачкой 19 и стопорной собачкой 20 (фиг. 4).
В гибком стержне выполнен канал 21, сообщенный через радиальный канал 22, канал 23 штуцера 24 и канал 25, выполненный в кольце (фиг.З), с кольцевой полостью вибратора, а соос ным каналом 26, радиальньм каналом 27, через проточку 28, выполненными .на валу, каналом 29, выполненным в бобьш1ке и каналом 30 штуцера 31 сообщен с источником сжатого воздуха.
В дне 32 (фиг.2) кольцевой емкости для заготовок выполнены радиальные пазы 33, в которых с зазорами размещены ограничители стоп-заготовок в виде планок 34, рабочие торцы 35 которых расположены в исходном положении планок на уровне дна кольцевой емкости для заготовок. При крайнем верхнем положении планок их рабочие торцы подняты на отрезок а
При этом кольцевая полость разделена на гнезда 36 для расположения в них заготовок 37 и 38. Нижние концы 39 (фиг.1) планок закреплены на основании 40. Основание имеет возможность перемещения вдоль полой втулки.
На, станине з акреплено ступенчатое кольцо 41, жестко соединенное с фланцем 42. Фланец и основание 40 связаны пружинами 43. На станине закреплено малое кольцо 44, которое со ступенчатым кольцом и кольцами 45 и 46 образуют камеры 47 и 48 пневматического цилиндра, сообщенные поочередно каналами 49 и 50 с источником сжатого воздуха. В камере пнев- моцилиндра расположен подвижный вдоль нее кольцевой порщень 51, жестко соединенный с кольцеобразным штоком 52, на верхней части которого, расположенной вне пневмоцилинд- ра, закреплена опора 53 качения, установленная с возможностью взаимодействия с основанием. ,
0
5
0
Загрузочный вибробункер работает след /ющим образом.
На фиг.1-4 загрузочный вибробункер изображен в предзагрузочном положении, когда торцы 35 планок 34 расположены в исходных положениях , т.е. в плоскости дна 32 кольцевой емкости для .заготовок 1 . В данном положении загрузочного вибробункера в кольцевую емкость для заготовок 1. вручную по возможности равномерными слоями засыпаются навалом заготовки, высота которых при полной загрузке составляет 0,6-0,8 длины отрезка о , Затем через .каналы 30 и 29, проточку . 28, кан,алы 27, 26, 21, 22, 23, шланг (не показан) и канал 25 в кольцеоб- разньй паз 7 подается сжатьш воздух, что вызьшает интенсивное перемещение . по кольцеобразному пазу диска 8. Эти перемещения вызывают кольцеобразные колебания корпуса 2, в результате чего заготовки, расположенные в кольцевой полости 1, взаимно перемещаясь, располагаются слоями. Затем в камеру 48 от источника сжатого воздуха в малых количествах (например, через игольчатый дроссель) через канал 49 подается сжатый воздух, что вызывает медленное перемещение вверх пЬрпигя 51 и штока 52. При этом камера 47 каналом 50 сообщена с атмосферой.
0
5
в процессе подъема шток 52 через опору 53 качения приходит в контакт с основанием АО и начинает его мед ленно поднимать, преодолевая при эт усилие пружин 43.
Перемещение основания 40 вверх вызьгеает медленный подъем планок 34 в направляющих пазах 33, в результате чего их рабочие торцы 35 начинают выступать над плоскостью дна кольцевой полости 1, Указанное начало подъема торцов 35 над полостью дна 32 кольцевой полости 1 соответствует началу формирования стоп-заготовок в гнездах 36 кольцевой емкости. Это формирование стоп-заготовок начинается от дна кольцевой полости к ее верхней части по мере подъема тор- .цов 35 планок 34. Поднимающиеся торцы 35 создают местные препятствия для движущихся в направлениях меньших сопротивлений под действием вибрационного привода заготовок. При этом заготовки, вибрируя, обтекают поверхности торцов 35 и, стремясь занять крайние нижние положения, соударяются с вертикальными стенками планок, занимая положения слоями в гнездах 36 (заготовки 38 и 37). К концу хода вверх планок 34 их рабочие торцы 35 перемещаются на отрезок /Х, и заготовки располагаются стопками в разобщенных одно от другого гнездах 36, что исключает взаимное сцепление заготовок, расположенных в соседних гнездах. На этом процесс формирования стоп-заготовок заканчивается, т.е. заканчивается подготовительный процесс работы загрузоч- но-распределительной емкости. Затем канал 30 разобщается с источником
869
сжатого воздуха, движение диска 8 в кольцеобразном пазу прекращается, и включается в работу храповой механизм. Поскольку количество гнезд 36 равно количеству зубьев храпового колеса, при каждом двойном ходе ведущей собачки 19 кольцевая полость поворачивается на заданный угол, подводя под захватный орган (не показан) очередное гнездо со стопой заготовок.
После опорожнения кольцевой полости 1 работа автоматического загрузочного устройства прекращается,
хоаповой механизм выключается, камеру 47 сообщают через канал 50 с источником сжатого воздуха, а камеру 48 - через канал 49 с атмосферой. При этом шток 52 опускается в крайнее
нижнее положен-ие, а планки 34 вместе с базой 40 под действием пружин 43 опускаются так, что их рабочие торцы 35 располагаются в плоскости дна 32. Затем производят загрузку
кольцевой- емкости для заготовок 1 навалом заготовок, и работа загру- зочно-распределительной емкости повторяется.
Из.обретение позволяет образовать
стопы заготовок в загрузочной емкости, что является положительным для захвата штучной заготовки, так как последняя занимает определенное положение относительно захватного органа. Это позволяет производить работу автоматического загрузочного устройства без холостых ходов, снижаются энергетические потери захватного органа, ввиду того, что последний воздействует только на одну за
готовку.
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и выдачи плоских заготовок | 1983 |
|
SU1222364A1 |
| Загрузочный вибробункер | 1983 |
|
SU1088851A1 |
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Устройство для термообработки деталей типа стержней | 1981 |
|
SU985073A1 |
| Устройство для подачи плоских заготовок | 1990 |
|
SU1808446A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Станок для абразивной обработки ко-лЕц пОдшипНиКОВ КАчЕНия | 1979 |
|
SU837787A1 |
| Устройство для подачи заготовок | 1981 |
|
SU988424A1 |
| МНОГОПОТОЧНАЯ РОТОРНАЯ МАШИНА | 1967 |
|
SU205799A1 |
| Устройство для отделения плоских заготовок от стопы | 1986 |
|
SU1393505A1 |
| Загрузочный вибробункер | 1983 |
|
SU1088851A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
