Изобретение относится к обработке металлов давлением и может быть использовано для изготовления стержневых изделий с утолщениями на конце.
Цель изобретения - расширение тех- нологических возможностей, достигающееся за счет установки высадочного пуансона в зоне высадки с возможностью возвратно-носту- пательного перемещения относительно высаживаемой заготовки.
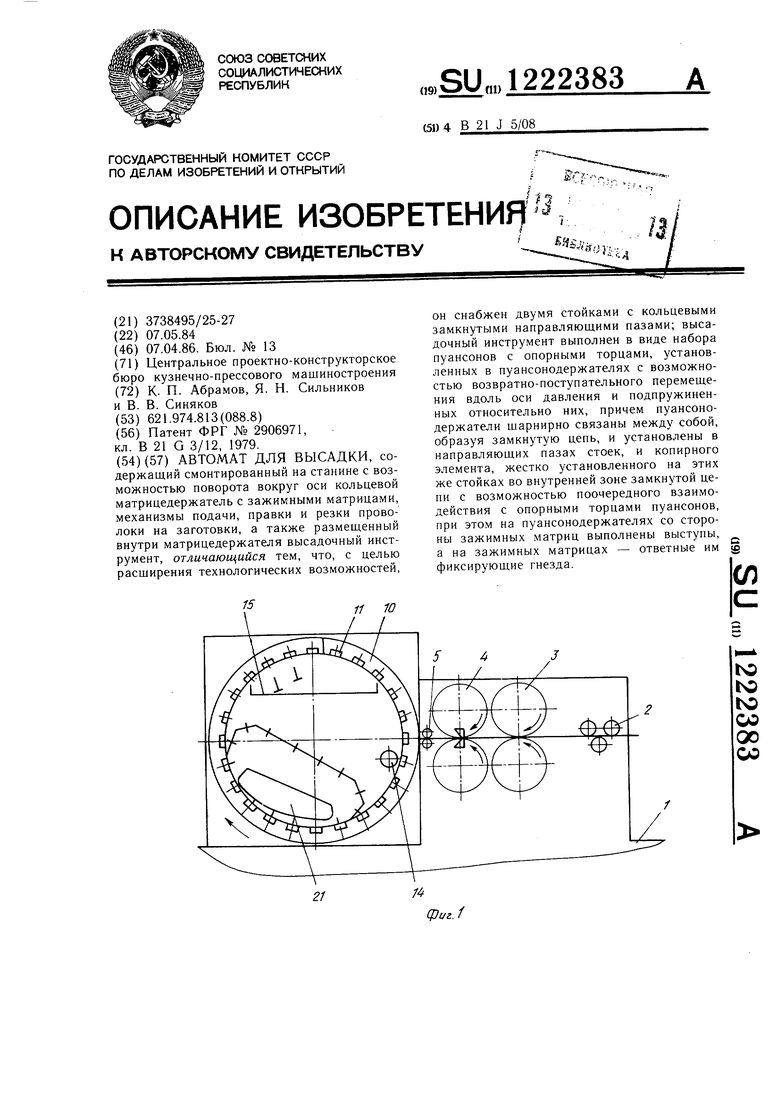
На фиг. 1 изображена принципиальная
схема автомата; на фиг. 2основная
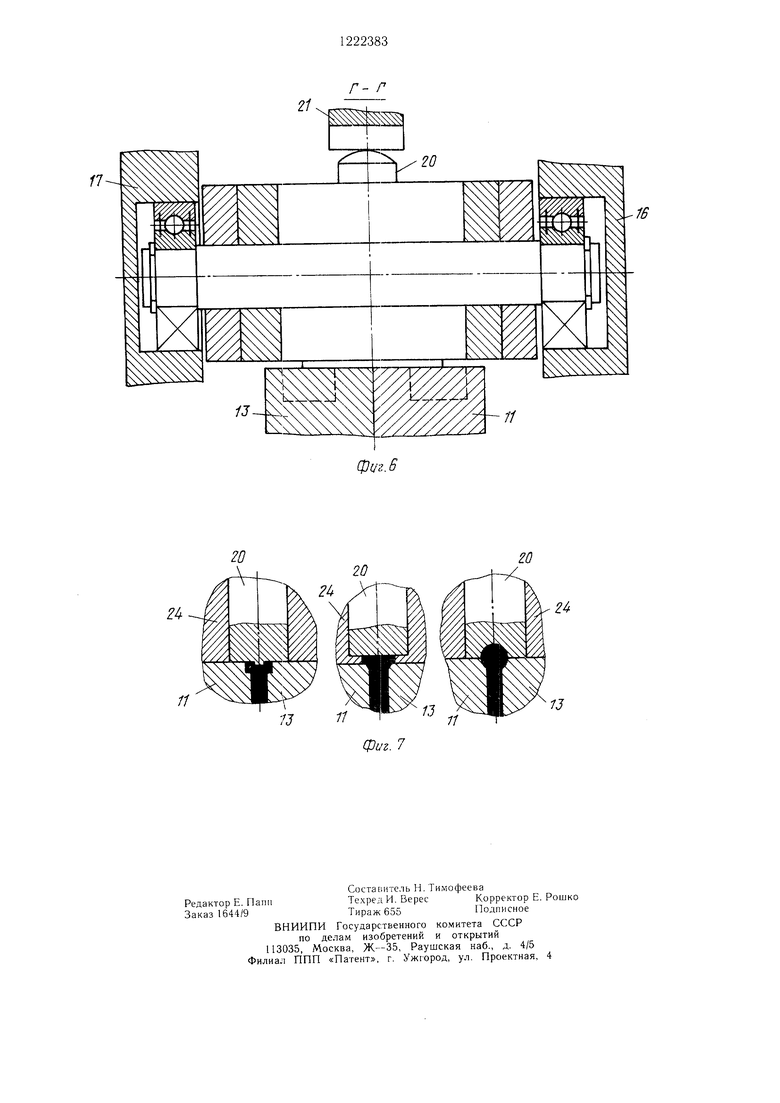
формообразующая часть автомата; на фиг. 3- сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - сечение В-В на фиг. 2; на фиг. 6 - сечение Г-Г на фиг. 3; на фиг. 7 - типы деталей, изготавливаемых на предлагаемом автомате.
Автомат содержит станину 1, на которой смонтированы механизмы правки 2, подачи 3, резки 4 ввода 5, неподвижная опора 6 и подвижная опора 7. Опоры 6 и 7 связаны регулировочным винтом 8. В опоре 6 установлен на шариках 9 приводной кольц-евой матрицедержатель 10 с матрицами И, а в опоре 7 установлен кольцевой матрицедержатель 12 с матрицами 13. С помощью регулировочного винта 8 опору 7 устанав- ливают в таком положении, что кольцевой матрицедержатель 10 с матрицами 11 и кольцевой матрицедержатель 12 с матрицами 13 составляют с плоскостью разъема некоторый малый угол 0°30-1°. Это обеспечивает свободный ввод заготовки в матрицы П и 13, и удаление готовых изделий из матриц в зонах ввода и удаления. В зоне высадки заготовки зазор между зажимными матрицами 11 и 13 постепенно уменьшается и обеспечивается зажим заготовки. При мак- симальном усилии высадки наблюдается максимальное усилие зажима.
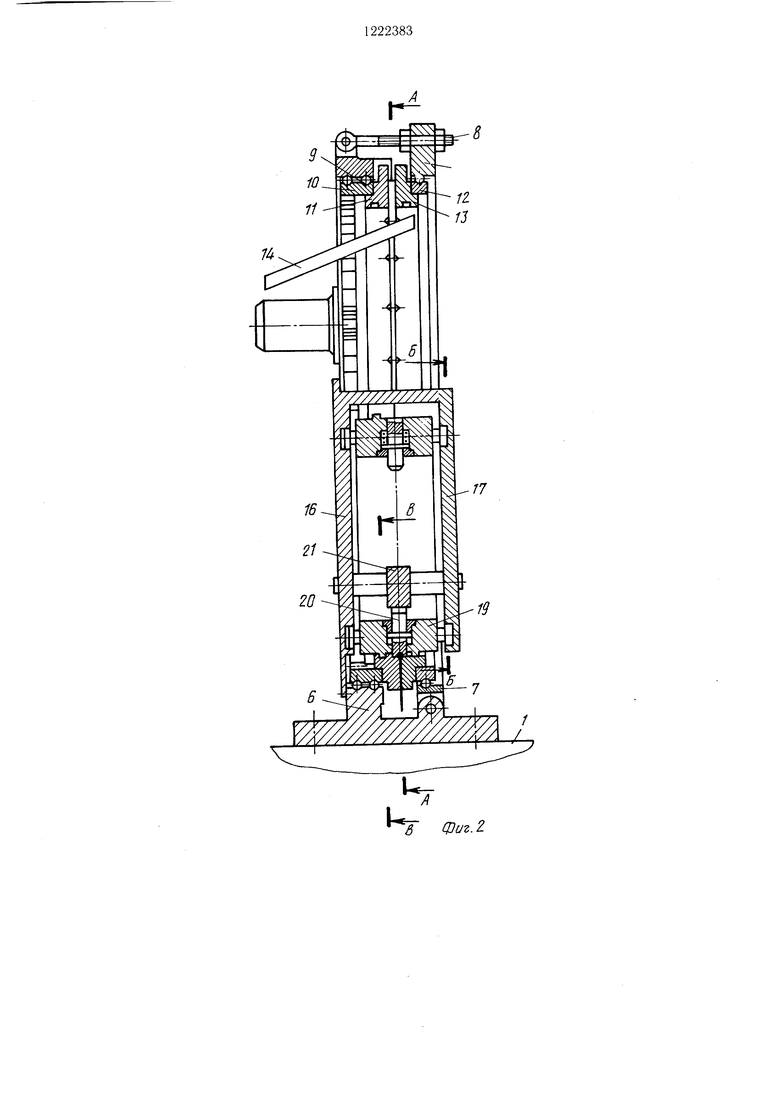
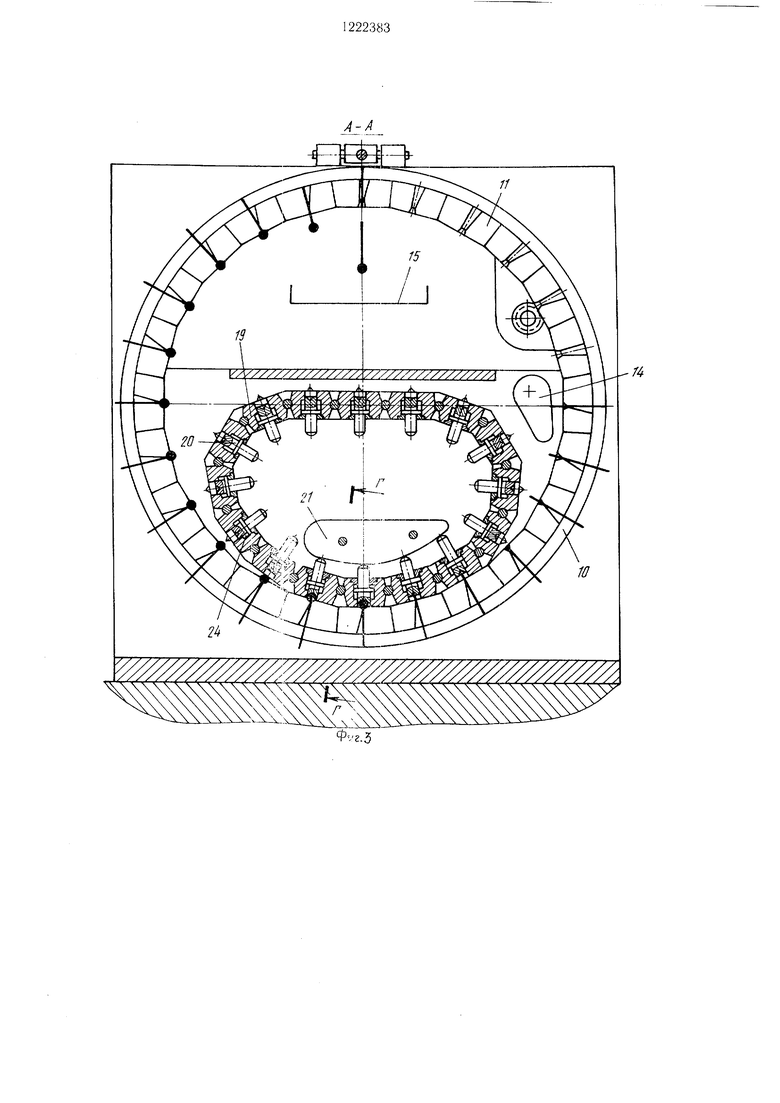
Автомат содержит также узел 14 позиционирования, лоток 15 для удаления готовых изделий, стойки 16 и 17 с направляющими кольцевыми замкнутыми пазами 18, в кото-
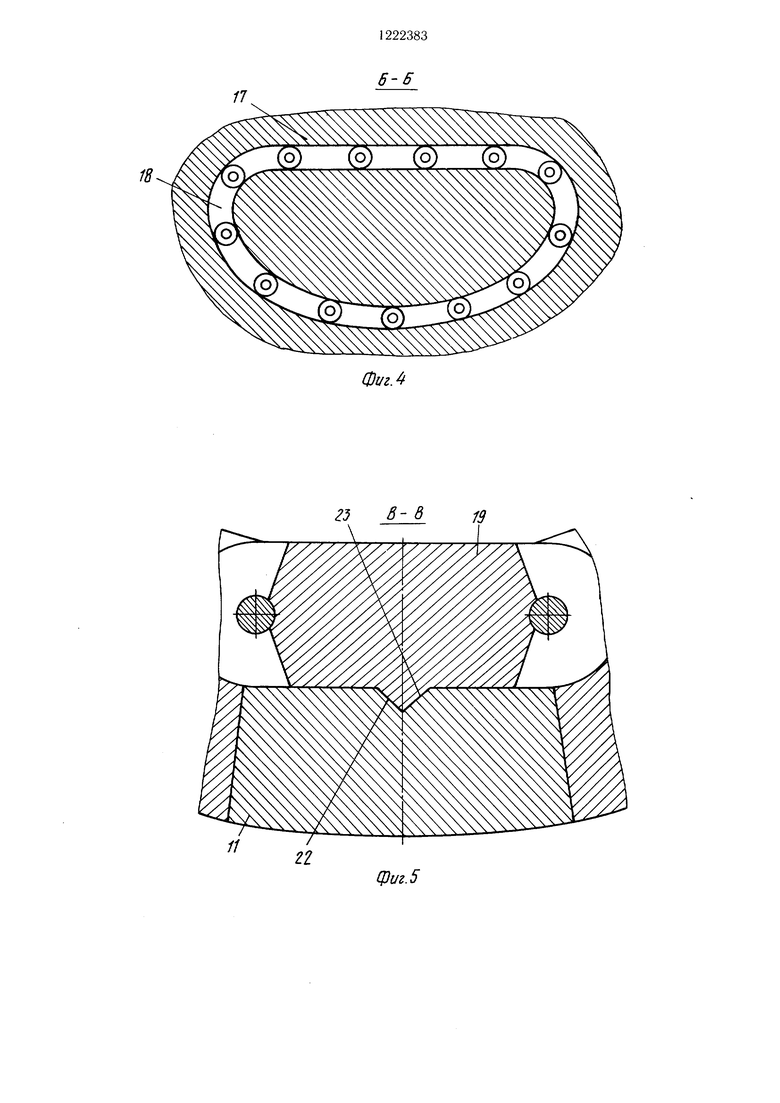
рых установлены пуансонодержатели 19, шарнирно связанные между собой, образуя замкнутую цепь. В пуансонодержателях 19 размещены подпружиненные пуансоны 20. Во внутренней зоне цепи на стойках 16 и 17 жестко закреплен копирный элемент 21. На пуансонодержателях 19 со стороны зажимных матриц 11 и 13 выполнены выступы 22, а на зажимных матрицах 11 и 13 ответные им фиксирующие гнезда 23.
Автомат работает следующим образом.
Проволоку вводят в механизм 2 правки, где осуществляют ее правку. Затем механизмом 3 подачи подают в механизм 4 резки и режут ее на заготовки. Заготовки подают в зажимные матрицы 11 и 13 механизмом 5 ввода. Приводной кольцевой матрицедержатель 10, поворачиваясь вокруг оси, переносит каждую матрицу с заготовкой с позиции ввода на позицию высадки, а далее на позицию удаления готовой детали.
Кольцевые матрицедержатели 10 и 12 и через выступы 22 передают движение пуан- сонодержателям 19. Выступы 23 точно фиксируют положение пуансонодержателей 19 относительно матриц 11 и 13.
Необходимая длина высаживаемой части заготовки устанавливается механизмом 14 позиционирования.
В зоне высадки заготовка зажимается матрицами 11 и 13 и высаживается пуансоном 19, который приводится в рабочее движение при взаимодействии с копирным элементом 21. Далее готовая деталь вместе с зажимными матрицами И и 13 перемещается в зону удаления, где матрицы 11 и 13 расходятся, а деталь под действием силы тяжести падает в лоток 15. Пуансоны 20 возвращаются в исходное положение пружиной 24.
Предлагаемый автомат обеспечивает изготовление деталей с различной формой утолщения за счет установки высадочного пуансона с возможностью возвратно-поступательного перемещения вдоль оси давления.
1U
Фиг.2.
Фиг.4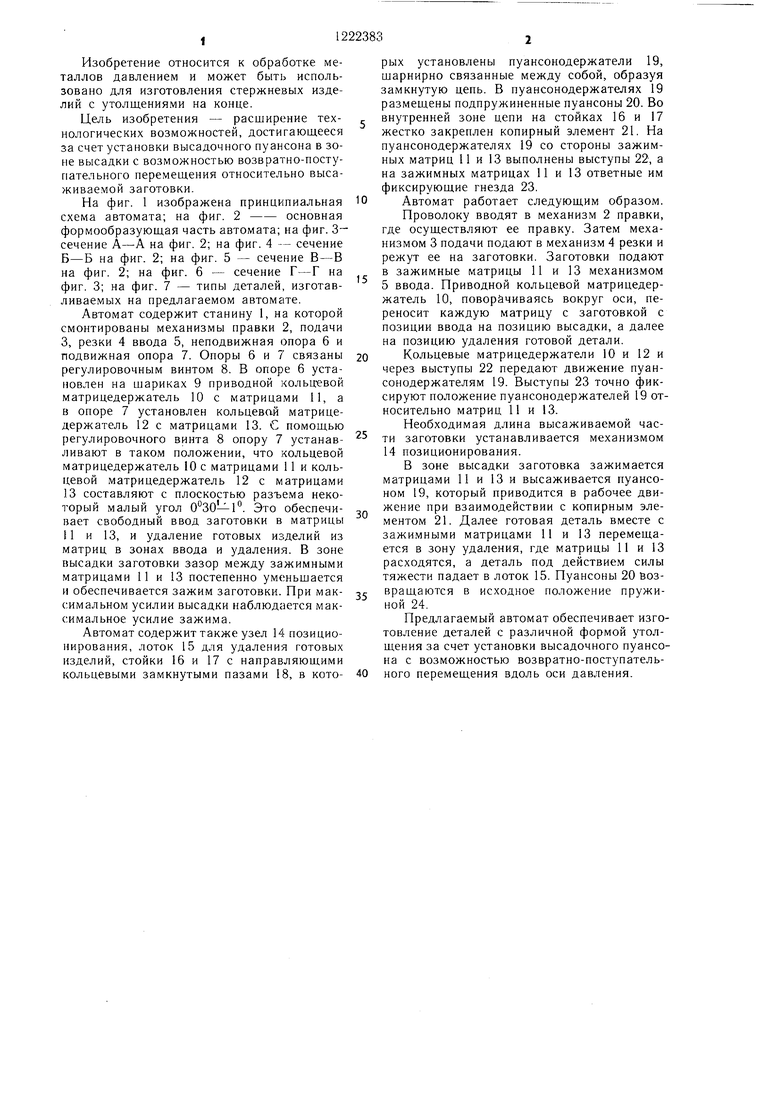
| название | год | авторы | номер документа |
|---|---|---|---|
| Гвоздильный автомат | 1981 |
|
SU988432A1 |
| Штамп горизонтально-ковочной машины | 1987 |
|
SU1426688A1 |
| ПРЕСС-АВТОМАТ ДЛЯ ДВУСТОРОННЕГО \ ХОЛОДНОГО ВЫДАВЛИВАНИЯВПТБ[^ ^^.'." 'з T't Г Г" Т f " .•' ''' '.'.. •;' iT' (^ 5 * | 1971 |
|
SU424647A1 |
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| Двухударный однопозиционный автомат для холодной высадки деталей стержневого типа | 1982 |
|
SU1084102A1 |
| Многопозиционный высадочный автомат | 1977 |
|
SU732063A1 |
| Автомат для изготовления гвоздей | 1980 |
|
SU961831A1 |
| Проволочно-гвоздильный автомат | 1977 |
|
SU766716A1 |
| ЗОЮЗНАЯ \Ь;;,П:НТй^-|?ШМ?04(Ц 1^нЬЛуТЕНД- j | 1972 |
|
SU331839A1 |
| Гвоздильный автомат | 1982 |
|
SU1121085A1 |
3-е
фиг. 5
Фи-г.6
11
7J77
| Патент ФРГ № 2906971, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
