Изобретение относится к машиностроению, а именно к захватам манипулятора.
Целью изобретения является повышение надежности работы захвата манипулятора за счет выборочного изменения давления в полостях эластичных пальцев.
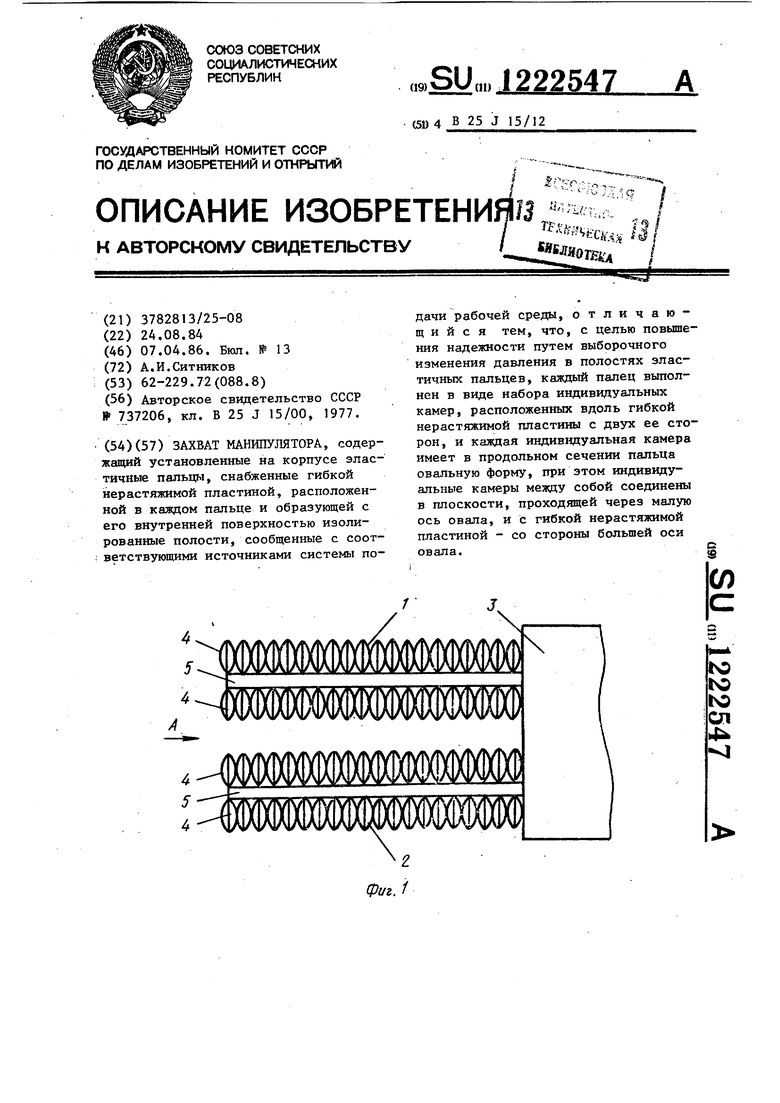
На фиг.1 изображен захват манипулятора, общий вид; на фиг.2 - вид А на фиг.1.
Захват манипулятора состоит из двух эластичных пальцев 1 и 2, установленных на корпусе 3.
Каждый эластивдый палец 1 и 2 выполнен в виде набора индивидуальных камер 4, расположенных вдоль гибкой нерастяжимой пластины 5 с двух ее сторон, образуя внутренние и наружные слои.
Каждая индивидуальная камера 4 имеет в продольном сечении захвата манипулятора овальную форму.
Индивидуальные камеры 4 в каждом слое между собой соединены в плоскости, проходящей через малую ось овала, и с гибкой нерастяжимой пластиной 5 - со стороны большей оси овала.
Гибкая нерастяокимая пластина 5 имеет шланги, предназначенные для, соединения каждой индивидуальной камеры 4 с соответствующими источниками системы подачи рабочей среды (насосным или безнасосным), изменяищим
давление рабочей среды в каждой индивидуальной камере 4.
12225472
Захват манипулятора работает сле- дукшщм образом.
В исходном положении захвата ма- i нипулятора давление рабочей среды в 5 индивидуальных камерах 4 всех слоев одинаково, поэтому эластичные пальцы захвата выпрямлены и параллельны один другому. При приближении захвата манипулятора к предмету, который 10 нужно взять, давление во внутренних слоях пальцев увеличивается и уменьшается в наружных слоях, что ведет к раскрытию свободных концов эластичных пальцев 1 и 2 вследствие их из- 15 гиба.
После того, как предмет оказался между эластичными пальцами, начинается обратный процесс: уменьшается давление во внутренних слоях и увеличивается в наружных до тех пор, пока эластичные пальцы, стремясь сблизиться, плотно не обхватят предмет.
В месте доставки груза эластич.Ш)1е пальцы разводятся для освобождения предмета и возвращаются в исходное положение.
При этом порядок и направление изменения давления рабочей среды в индивидуальных камерах 4 эластичных 30 пальцев 1 и 2 диктуются формой самого предмета.
В любом случае индивидуальные камеры 4 внутреннего и наружного слоев, расположенные на одном участке элас- 35 тичного пальца, работают при изгибе этого участка в противоположных режимах.
2025
Редактор А. Ворович
фиг. I
Составитель И. Бакулина
Техред И.Гайдош Корректор М.Демчик
Заказ 1656/17 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Силиал ШШ Патент, г. Ужгород, ул. Проектная, 4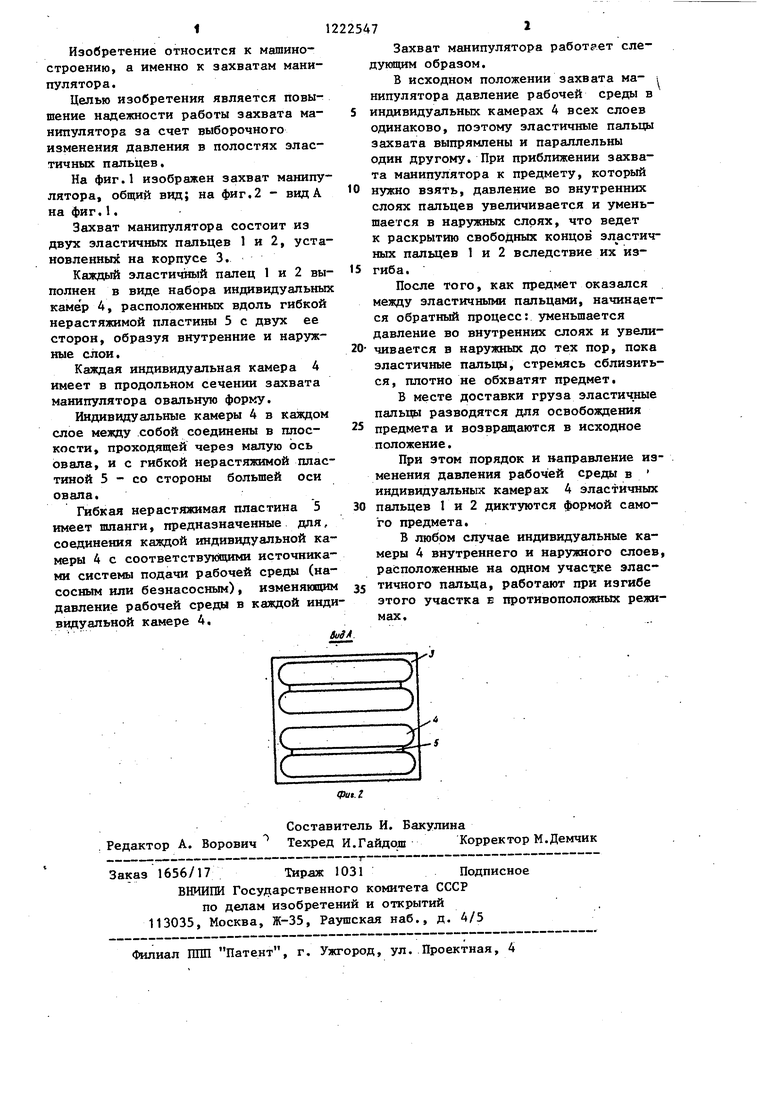
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Схват манипулятора (его варианты) | 1983 |
|
SU1229035A1 |
| Захват автоматического манипулятора | 1986 |
|
SU1421531A2 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Устройство для захвата | 1974 |
|
SU743678A1 |
| Захват | 1981 |
|
SU975392A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Захватное устройство манипулятора с рабочим элементом из электропроводящего гибкого углеродного материала | 2020 |
|
RU2743441C1 |
| ДВИГАТЕЛЬ | 1978 |
|
SU1066281A1 |
| ЭЛЕКТРОТЕРМИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2043918C1 |
| Захват | 1977 |
|
SU737206A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
