f
1224240
Изобретение относится к подъемно-транспортному оборудованию, а именно к грузозахватным устройствам.
Цель изобретения - повышение удобства в эксплуатации.
На фиг. 1 изображено предлагаемое устройство, разрез на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Грузозахватное устройство содержит корпус 1, в котором установлен с возможностью поворота вокруг своей оси горизонтальный вал 2. На валу 2 поворотно установлен кронштейн 3, соединенный гибкими тягами 4 с элементом навески на грузоподъемную машину.
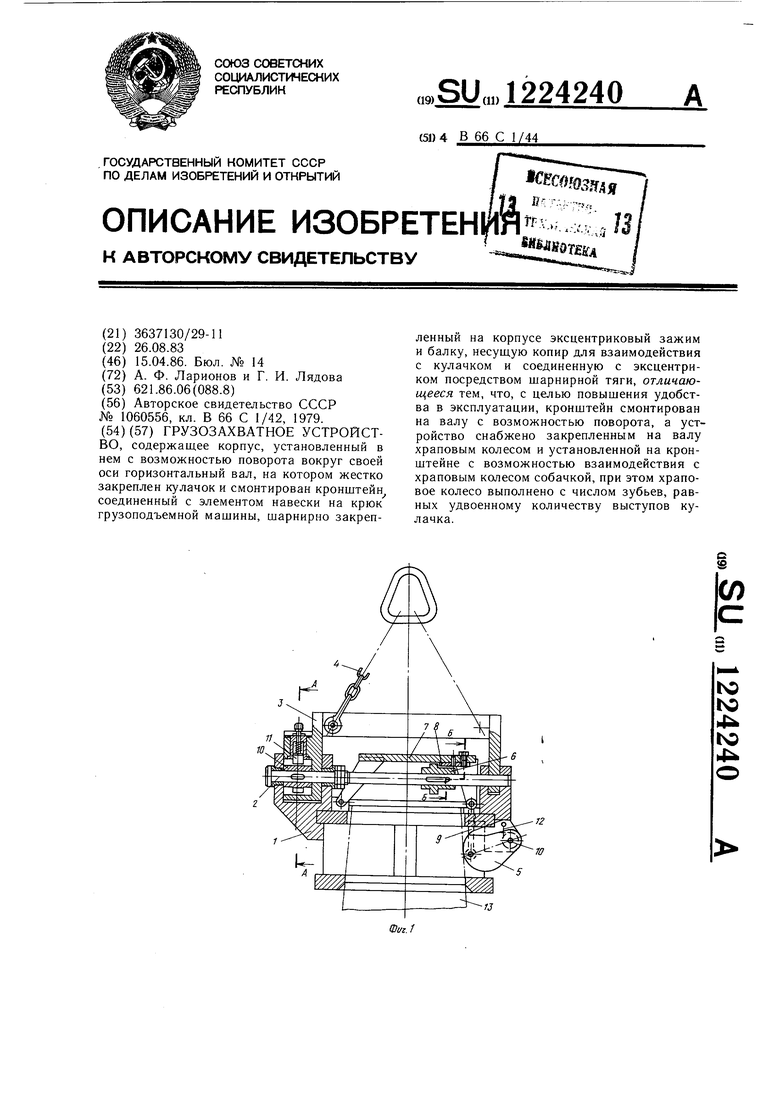
На корпусе шарнирно закреплен эксцентриковый зажим 5, а на валу 2 неподвижно закреплен кулачок 6. На корпусе также шарнирно закреплена балка 7, несушая копир 8 для взаимодействия с кулачком 6 и соединенная с эксцентриковым зажимом посредством шарнирной тяги 9.
На валу 2 неподвижно закреплено храповое колесо 10, для взаимодействия с которым на кронштейне установлена подпружиненная собачка 11. Число зубьев храпового колеса 10 равно удвоенному количеству
ра в корпус 1. Копир 8 должен находиться над выступом кулачка 6. После установки устройства на груз 13 и последующего ослабления гибких тяг 4 кронштейн 3 за счет размещения его центра масс выше точки опо ры поворачивается на валу 2, например, по часовой стрелке.
При повороте кронщтейна последний посредством собачки 11 поворачивает храповое колесо, закрепленное на валу 2. Од10 новременно происходит поворот кулачка 6, который сходит выступом профилированной по верхности с копира 8. Последний под действием собственного веса и пружины 12 перемещается ближе к центру вала 2, а эксцентриковый зажим прижимается к грузу.
15 При натяжении гибких тяг 4 кронштейн 3 возвращается в исходное положение. Вал 2 с кулачком 6 не меняет своего положения, так как тяга 9 скользит по тыльной стороне зуба храпового колеса и не
20 поворачивает его.
При подъеме корпуса 1 эксцентриковый зажим 5 удерживает груз 13 в корпусе 1. После транспортировки груза 13 гибкие тяги 4 ослабляются, кронштейн 3 поворачивается
1U r.u. 1U i.c.,,r.v. .r..,..,j „.....,и поворачивает с помощью собачки 11 вал 2.
выступов кулачка 6. Эксцентриковый зажим 25 При этом выступ профилированной поверх подпружинен внутри корпуса пружиной 12ности кулачка 6 находит на копир 8, который кручения.перемещаясь, поворачивает посредством тя- Устройство работает следующим образом.ги 9 эксцентриковый зажим 5, выводя его В раскрытом положении устройство на-из зацепления с грузом. Устройство снимает- водится на груз 13 и опускается до упо-ся с груза.
А-А
ра в корпус 1. Копир 8 должен находиться над выступом кулачка 6. После установки устройства на груз 13 и последующего ослабления гибких тяг 4 кронштейн 3 за счет размещения его центра масс выше точки опоры поворачивается на валу 2, например, по часовой стрелке.
При повороте кронщтейна последний посредством собачки 11 поворачивает храповое колесо, закрепленное на валу 2. Одновременно происходит поворот кулачка 6, который сходит выступом профилированной по верхности с копира 8. Последний под действием собственного веса и пружины 12 перемещается ближе к центру вала 2, а эксцентриковый зажим прижимается к грузу.
При натяжении гибких тяг 4 кронштейн 3 возвращается в исходное положение. Вал 2 с кулачком 6 не меняет своего положения, так как тяга 9 скользит по тыльной стороне зуба храпового колеса и не
поворачивает его.
При подъеме корпуса 1 эксцентриковый зажим 5 удерживает груз 13 в корпусе 1. После транспортировки груза 13 гибкие тяги 4 ослабляются, кронштейн 3 поворачивается
и поворачивает с помощью собачки 11 вал 2.
5-6
х
8
Фиг. г
Составитель Т. Губина
Редактор Т. МитейкоТехред И. ВересКорректор Л. Патай
Заказ 1883/20Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
13035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Фиг.З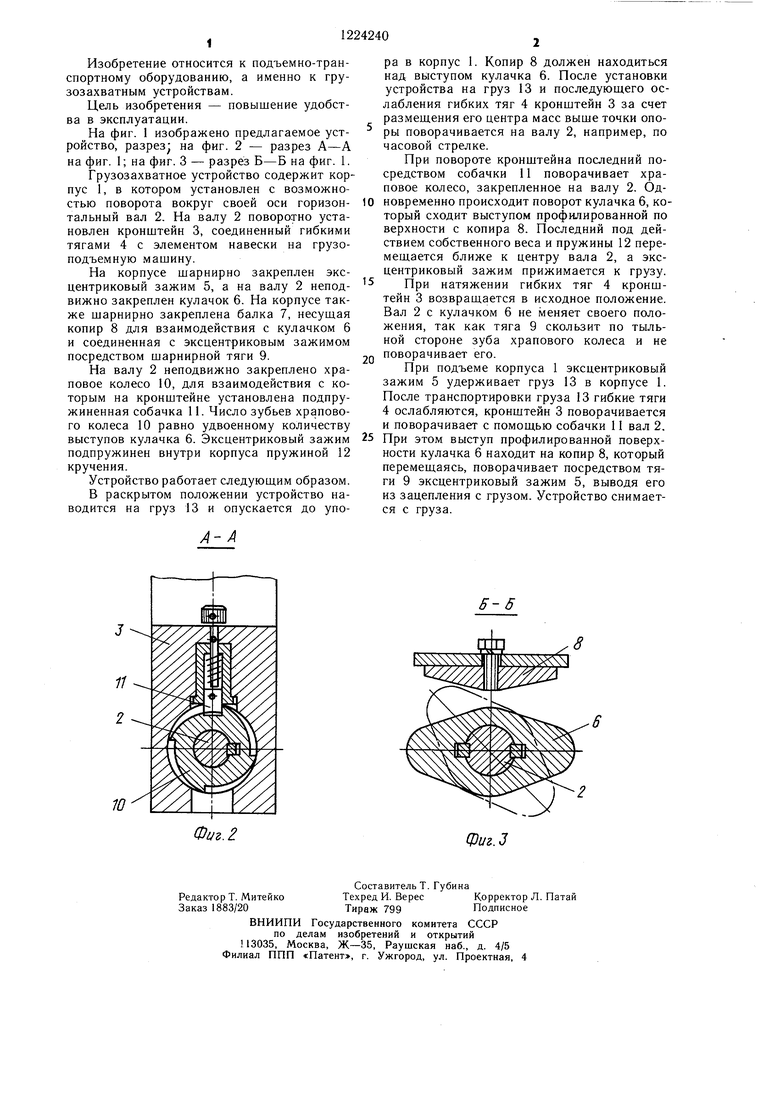
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1060556A1 |
| Грузозахватное устройство | 1983 |
|
SU1240719A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Г. М. РЫБКИН и В. Т. ЧиликовВсесоюзный научно-исследовательский инструментальный институт | 1970 |
|
SU282010A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО НА ПОСТОЯННЫХ МАГНИТАХ | 2010 |
|
RU2452681C1 |
| Устройство для гибки деталей | 1985 |
|
SU1316727A2 |
| Автоматическое вакуумное захватное устройство | 1976 |
|
SU616219A1 |
| Ленточно-шлифовальный станок | 1981 |
|
SU1006177A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1400714A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Грузозахватное устройство | 1982 |
|
SU1060556A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
