Изобретение относится к технологическому оборудованию, применяемому для автоматизации и механизации технологических процессов, и может быть использовано в конструкции промышленных роботов и манипуляторов.
Цель изобретения - повышение надежности фиксации изделия.
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - сечение А-А на фиг.1; на фиг.З-14 изображена кисть со схватами в различных стадиях работы манипулятора.
Рука имеет ось-шестерню 1, на которой крепится корпус 2 с возможностью поворота вокруг этой оси с помощью щестерни 3, установленной на валу привода 4.
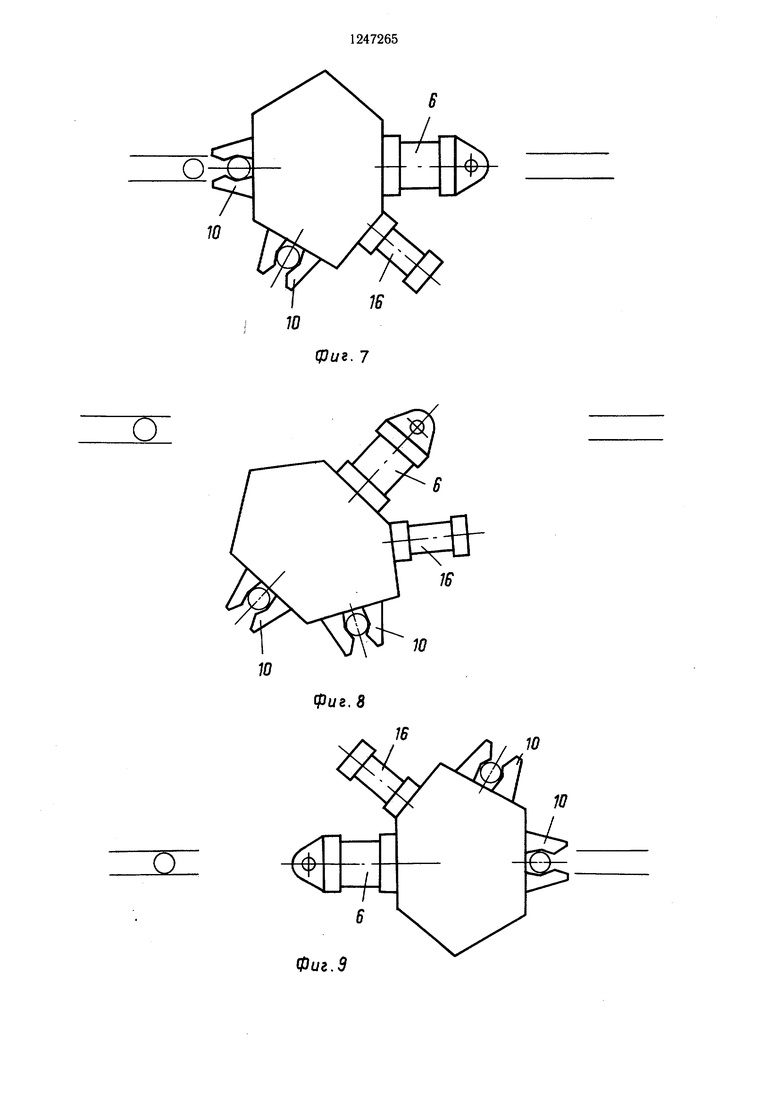
Корпус 2 в исходном положении (фиг.З) установлен перед устройством для выдачи заготовок на исходную позицию. При подаче 10 сжатого воздуха в бесштоковую полость силового цилиндра 6 первый схват зажимает заготовку 15 (фиг.4). При подаче воздуха в щтоковую полость поворотного цилиндра 16 кисть поворачивается против часовой стрелки в крайнее положение (фиг.5). После этого при подаче сжатого воздуха в щтоковую полость силового цилиндра второй схват разжимается (фиг.6). После этого происходит зажим второй заготовки (фиг.7). Затем посредством привода и пары зубчатых колес.
В центре обоймы 5 напротив штока силового цилиндра 6 имеется сквозной радиальный паз, в который может входить толкатель клина 7 соосно щтоку силового цилиндра 6. В клин 7 упираются два ролика 8, jo расположенных на руке, корпус с кистью ос-и которых 9 запрессованы в губки 10. Губ- устанавливается в зону обработки заготовок ки 10 имеют возможность вращения вокруг(фиг.8). После обработки заготовок корпус
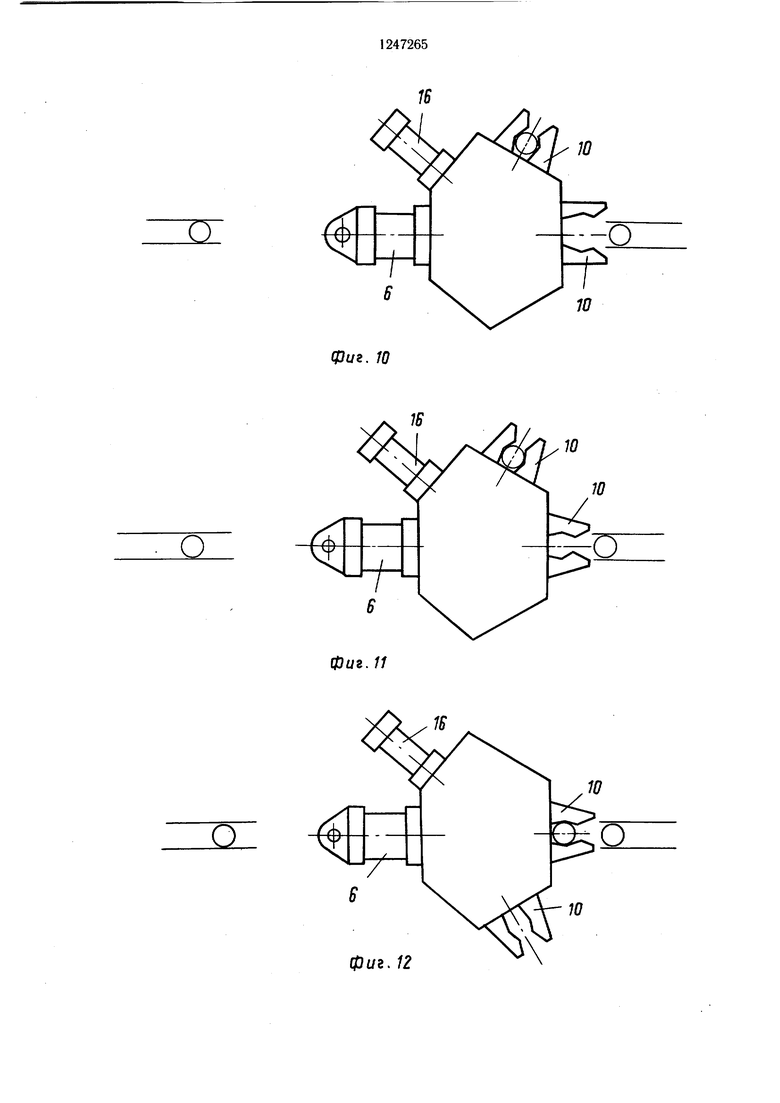
осей 11, которые закреплены в несущем эле- разворачивают в положение на 180° от исход- менте кисти 12. Силовое замыкание клина 7 с ного (фиг.9). При манипулировании пода- роликами 8 осуществляется пружиной 13,чей сжатого воздуха в силовой и поворота с обоймой 5 - пружиной 14. Изде- 25 ный цилиндры разжимается второй схват - лие 15 удерживается в схвате между двумя деталь выбрасывается в приемную кассету губками 10 и опорой клина 7. На корпусе 2 закреплены силовой цилиндр 6, поворотный цилиндр 16, обойма 5 и ось зубчатого колеса 17, которое входит в зацепление с рейкой 18, закрепленной на щтоке поворотного цилиндра 16. Само зубчатое колесо 17 жестко связано с несущим элементом кисти 12.
(фиг.10), сжимается уже пустой второй схват (фиг.П), поворачивается кисть в другое крайнее положение (фиг. 12), разжимается первый схват - деталь выбрасывается в приемную кассету (фиг. 13), и затем весь корпус разворачивается в исходное положение (фиг.14).
Таким образом, сжатие и разжим любого из двух схватов происходит только в положении, когда толкатель клина 7 находится против радиального паза обоймы 5, а поворот кисти со схватами происходит с помощью поворотного цилиндра 16.
Устройство работает следующим образом.
Корпус 2 в исходном положении (фиг.З) установлен перед устройством для выдачи заготовок на исходную позицию. При подаче 0 сжатого воздуха в бесштоковую полость силового цилиндра 6 первый схват зажимает заготовку 15 (фиг.4). При подаче воздуха в щтоковую полость поворотного цилиндра 16 кисть поворачивается против часовой стрелки в крайнее положение (фиг.5). После этого при подаче сжатого воздуха в щтоковую полость силового цилиндра второй схват разжимается (фиг.6). После этого происходит зажим второй заготовки (фиг.7). Затем посредством привода и пары зубчатых колес.
5
o расположенных на руке, корпус с кистью устанавливается в зону обработки заготовок (фиг.8). После обработки заготовок корпус
ный цилиндры разжимается второй схват - деталь выбрасывается в приемную кассету
(фиг.10), сжимается уже пустой второй схват (фиг.П), поворачивается кисть в другое крайнее положение (фиг. 12), разжимается первый схват - деталь выбрасывается в приемную кассету (фиг. 13), и затем весь корпус разворачивается в исходное положение (фиг.14).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Устройство для размещения штучных заготовок | 1987 |
|
SU1473885A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1296368A1 |
| Устройство для подачи заготовок | 1982 |
|
SU1047659A2 |
| Токарный автомат | 1978 |
|
SU768570A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1980 |
|
SU872251A1 |
| Устройство для поштучной выдачи плоских заготовок из стопы | 1981 |
|
SU956102A1 |
| Устройство для хранения и подачи бортовых крыльев покрышек пневматических шин | 1980 |
|
SU871409A1 |



сю
10
фиг. tf
Ю
фиг. 5
10
дЭ(/г. 7
и
10
фиг. а
п
Фиг. 5
7
W
фиг. W
О
фиг. 12
IS
n
фиг. 13
-00
w
CO
Фuг.lf
| Белянин П | |||
| Н | |||
| Промышленные роботы США | |||
| М., НИАТ, 1978 | |||
| с | |||
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |
| Рельсовый башмак | 1921 |
|
SU166A1 |
