изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления приводами механизмов передвижения опор кранов.
Цель изобретения - повьмение надежности устройства.
На чертеже изображена функциональная схема устройства.
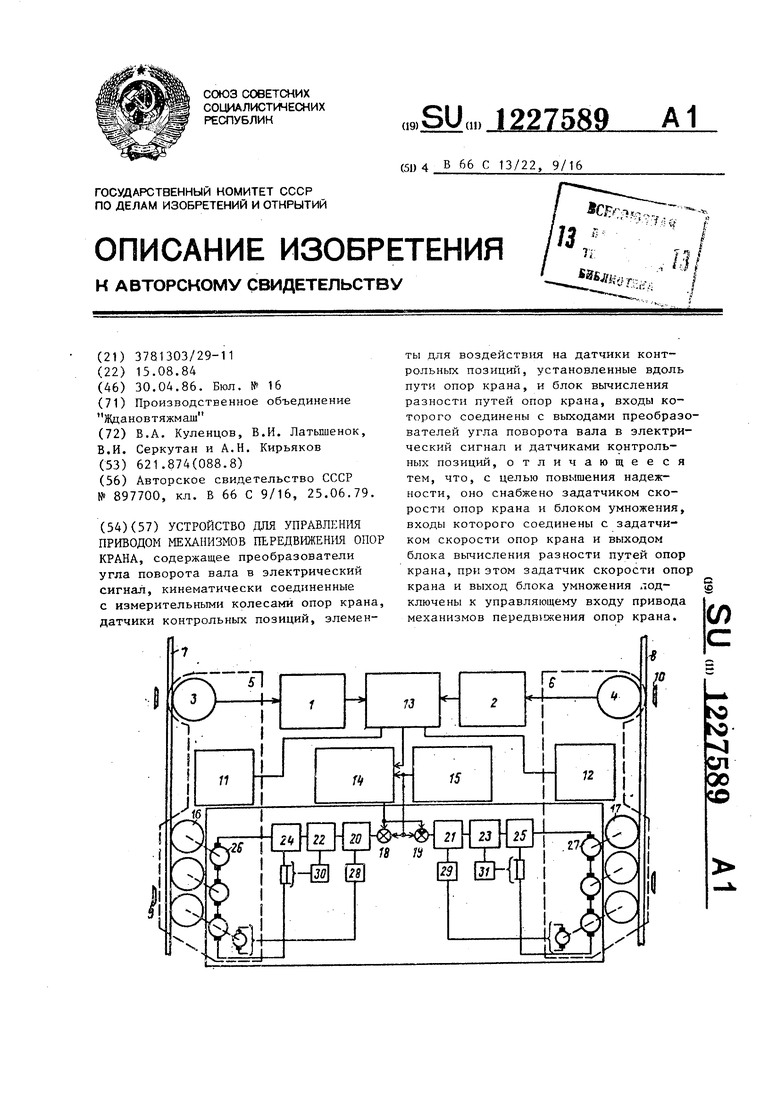
Устройство для управления приводо механизмов передвижения опор крана содержит преобразователи 1 и 2 угла поворота вала в электрический сигнал кинематически соединенные с измерительными колесами 3 и 4 опор 5 и 6 крана. Вдоль путей 7 и 8 опор 5 и 6 установлены элементы 9 и 10 для воздействия на датчики 11 и 12 контрольных позиций Входы блока 13 вычисления разности путей опор 5 и 6 крана подсоединены к выходам преобразователей 1 и 2 и к датчикам 11 и 12, Выход блока 13 подключен к одному входу блока 14,умножения, другой вхо которого соединен с задатчиком 15 скорости опор 5 и 6 крана. Задатчик 15 и выход блока 14 соединены с уп равляю1иими .входами привода механизмов 16 и 17 передвижения опор 5 и 6 крана.
Редактор А.Огар
Составитель А, Гедеонов Техред Н.Бонкало
Заказ 2257/24 Тираж 799Подписное
ВНШГШ Государственного комитета СССР
по делам изобретений и открыт:ий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Привод содержит элементы 18 и 19 сравнения, регуляторы скорости 20 и 21 и тока 22 и 23, подключенные к тиристорным преобразователям 24 и 25, питающим двигатели 26 и 27 механизмов 16 и 17, Обратная связь по скорости и току осуществляется с помощью датчиков 28 и 29 скорости и датчиков 30 и 31 тока.
Устройство для управления приводом механизмов передвижения опор работает следующим образом.
Задатчик 15 вьщает сигнал, пропорциональный заданной скорости опор 5 и 6 крана. При перекосе опор 5 и 6 крана на выходе блока 13 появляется сигнал, амплитуда которого соответствует величине перекоса опор 5 и 6, а полярность - направлению перекоса. Этот сигнал перемножается с сигналом задатчика 15 и поступает на управляющий вход привода (на элементы 18 и 19 сравнения), уменьшая скорост забежавшей опоры и увеличивая скорость отстающей опоры. Блок 14 исключает разворот крана при его малой скорости передвижения и большой величине сигнала блока 13. Датчики 11 и 12 корректируют работу блока 13 при проскальзывании колес 3 и 4.
Корректор С.Шекмар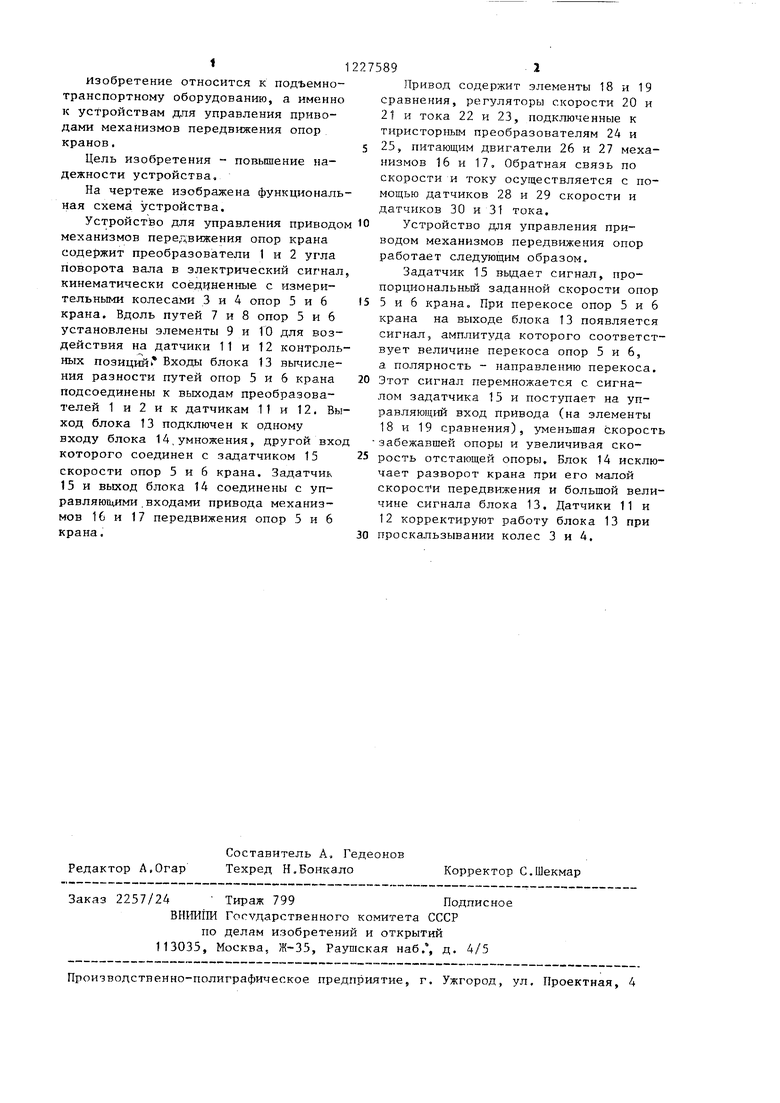
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом механизма передвижения опор крана | 1982 |
|
SU1047821A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Устройство для синхронного перемещения механизмов грузоподъемного средства | 1980 |
|
SU887425A1 |
| Устройство для управления торможением механизмов передвижения крана мостового типа | 1989 |
|
SU1691272A1 |
| Регулятор скорости движения дождевальной машины | 1981 |
|
SU1090296A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Система управления торможением опор крана мостового типа | 1988 |
|
SU1646980A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| Система управления положением транспортного механизма | 1985 |
|
SU1386955A1 |
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
