ные суставами 10, 12-17 звенья ;кисти, .предплечья, .плеча и каждый icycTaiB 12-17 задающего орга.на icoiCTOHT из привода сустава 18, датч:гка угла 19, являющего,ся датчиком обратной связи по .положению.
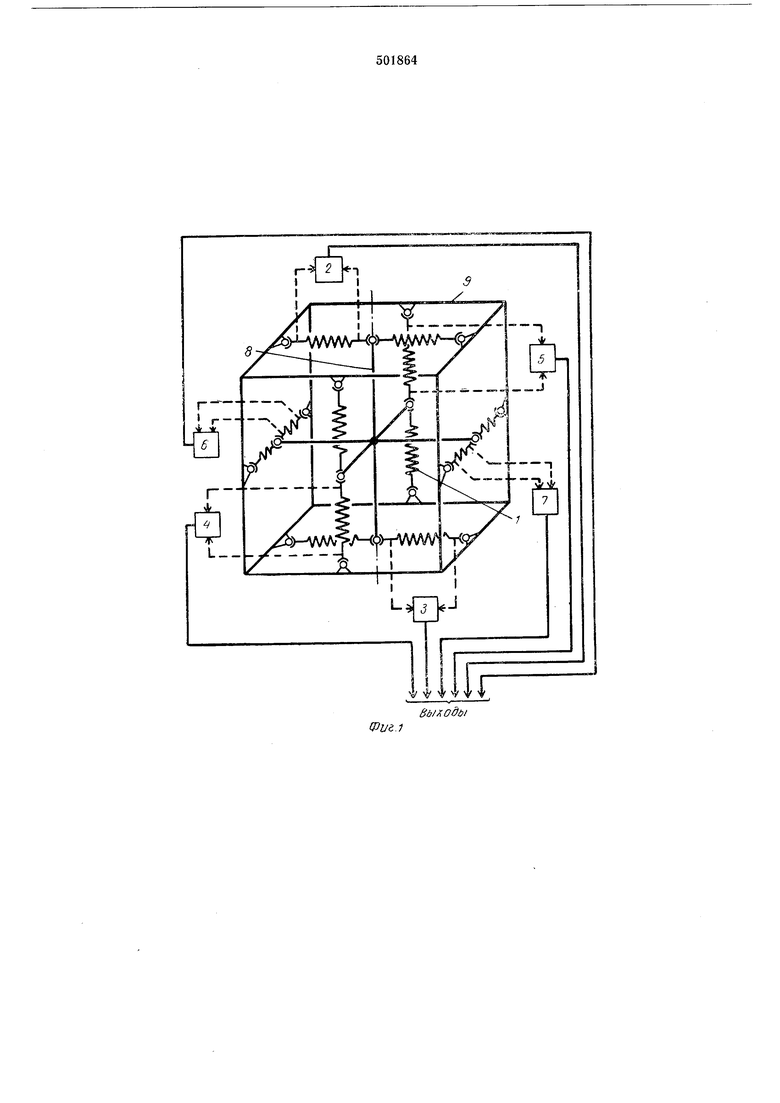
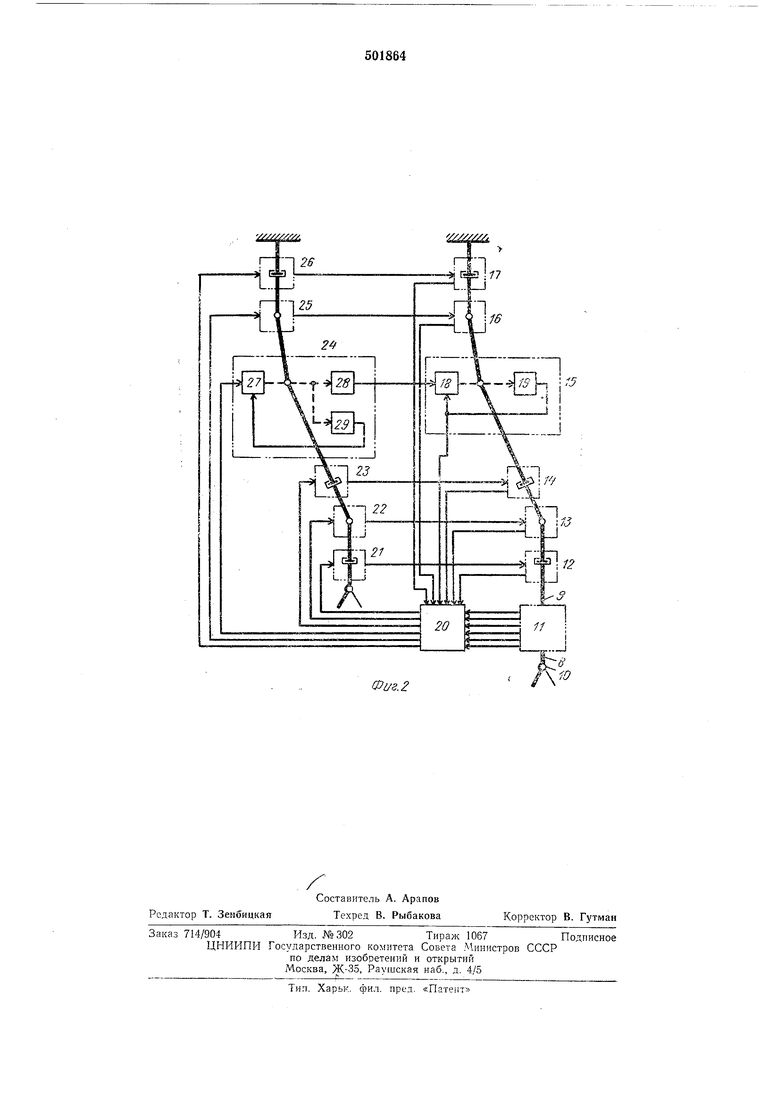
Между двумя (киставьими .суставами 10 и 12 задающего устаяовле.н .шестистепе-нной датчИК усилий и .моментов 11, (НеподвИЖноо звЗгЮ 9 которого €0бди1нено с суставом 12, а лодвижлюе звено 8 - с суставом 10 (с.хвато,м). Выходы шестистепенлого датчика усилий и Моментов // соединены .со входа1ми ;ВЫЧислителыного устройства 20, выходы KOTOipOiro, :В свою ОЧвредь, .соединены .со входаМИ (Приводов 27 соответствующих суставов 21-26 исполнительного органа. Каждый из суставов 2,1-26 исполнительного органа содерж.ит привод 27, датчик момента 29. являюнлийся датчиком обратной связн в системе передачи усилий, н датчик угла 28, выход которого связан со входом привода 18 соответствующего сустава 12-17 задающего органа.
Манипулятор работает следующим образом. Усилия или моменты, создаваемые оператОрОМ, через ;падвиж1}юе звено 8 дефо.рми|руют упругие элементы / щестистенеиного дагчигка усилий и моментов 11.
Сигналы, :про.по9ииональные деформации уп.ругих элем.зйтов ./, .с выходов измерителей даформации 2-7 подаются .на |3ходы вычисЛите.чьного устройства 20, .кото.рое фор.мирует напряжения 1на входы приводов 27 суставоЗ 21-25 «ИО, нроторциолальные усилиям, создав а.JIM ым онератором IB каждом из суста.зов 12-17 задающего органа. Приводы 27 каждого из суставов 21-26 «liO отрабатывают постунающи 1на|Н.ряжения до тех ио.р, .пока они .не .:рГ|.(Няются с .сиг.иаламИ датчиков мо;мента 29 «ИО.
3|Д.:сь (.может быть .два характе.рных случая: либо звенья «ИО не встречают преграды H.не подвергаются воздействию нагрузки и тогда происходит свободное движение «ИО, т. к. сигнал обратной связи по нагруз.ке равен нулю, либо в некотором положении «ИО
1но.двергается такому воз.деиствию анещ.неи нагрузки от объекта манилулироваиня, что система л.ридет в равновесие и «ИО остановится. iB любод случае лри движелии «ИО
изменения положения .звеньев измеряется датчиками углов 28 «ИО, сигналы с которых постунают 1на входы приводов 18 соответствующих сустав.ов 12-17 задающего орга.иа, п.ри это.м .последний отслеживает .положе.ние
«ИО до согла1сования силналав датчиков угла 28 с .си.пналами .датчиков угла /.9 задающето орга.на. РГзменение положе.иия звеньев «ЗО относительно друг друга, основа.ния «30 И руки оператора (приводит .к деформации других элементов 7 щестистепештого датчика и, «а.г.рузка передается 1на .руку операто.ра и |На .ней воспроизв.одится усилие, действующее .на «ИО. Таким образом, исполнительный И задающий о.рганы ло желанию онератора совершают .на.иравленяые движения и развивают Я1е0бходимые статические усилия, .приложенные к объекту манинулирования.
Форм .у л а и 3 о б р е т е .и и я
Очув.ствленный дистанционный .ко.пирующий Манипулятор, содержащий задающий и исполнительный орган с кистевыми суставами, датчики .моментов (усилий) и датчики
обратной связи ino положению иа задающем оргаНе, датчики ноложеиия и датчики обрат|НОЙ СВЯЗИ .по мОМбнту (усилию) в .суставах наполнительного о.ргана, соединенные системой управления по 1положе.нию и .моменту
(усилию), имеющей вычислительное устройство, со вхдда1МИ котсрото .соединены выходы датчиков обратной связи но положению, а с выходами связаны ..приводы суставов иснолнителыного органа, отличающийся те.м,
чх.о, .с Целью упрощения конструкции задаю.щего орГана и увеличения точности воопроизведения усилия на исполнительной ортане, между .дву.мя -кистевыми 1суставами задающего о.рга1на установлен щестистелениой датчик
усилий и моментов, выходы которого соединены с соот1ветствующи1ми входами 1выч.ислительното устройства.
Ф1/г.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU481418A1 |
| Устройство для управления очувствленным дистанционным копирующим манипулятором | 1978 |
|
SU783750A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления суставом очувствленного дистанционного копирующего манипулятора | 1974 |
|
SU559820A1 |
| Устройство для управления суставом очувствленного копирующего манипулятора | 1974 |
|
SU548413A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| КОМПЛЕКС УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ МАНИПУЛЯТОРОМ | 2018 |
|
RU2710290C1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |