I1
Изобретение относится к грузозахватным устройства, предназначенным преимущественно для пакетированНЬ Х грузов.
ЦелЬю изобретения является расши- рение эксллуатационньк возможностей путем обеспечения захвата грузов различных габаритов.
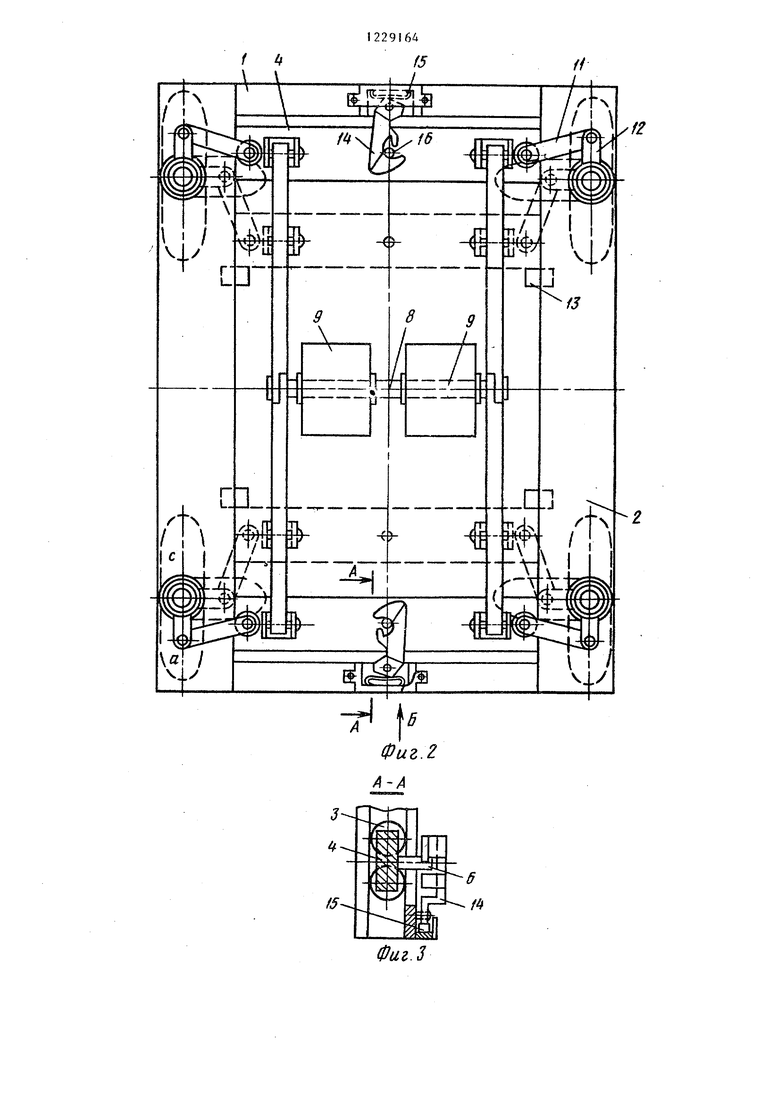
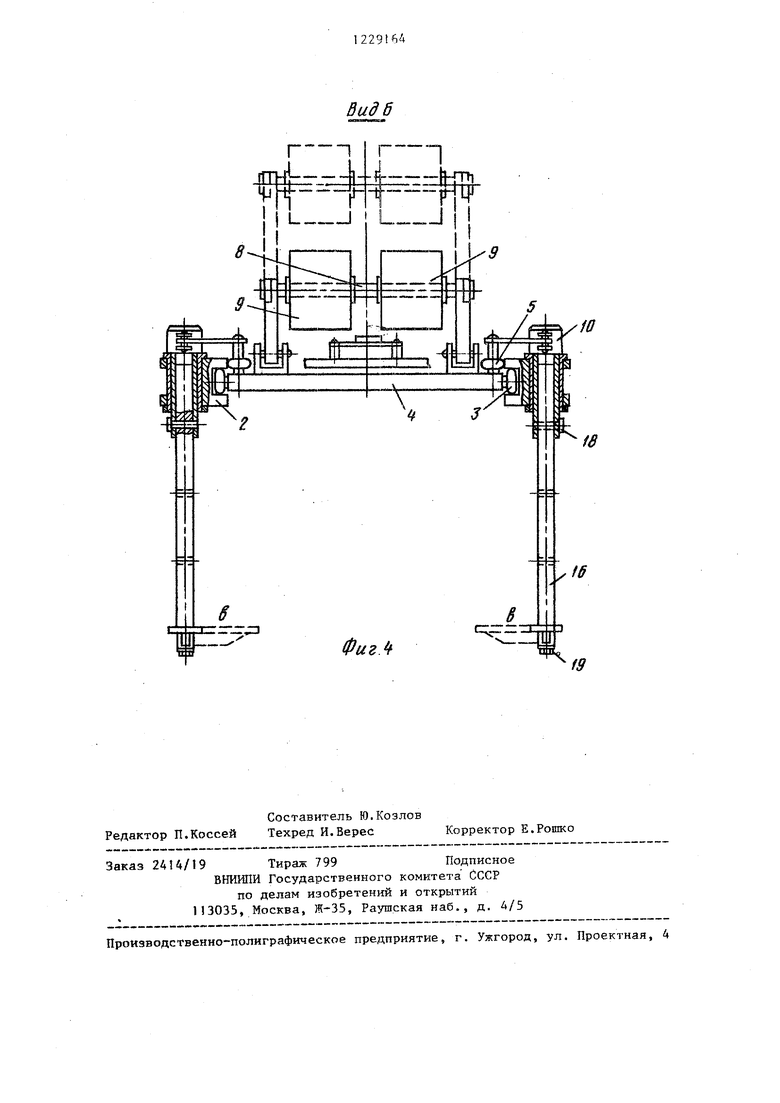
На фиг. 1 показано устройство, общий вид на фиг. 2 - то же, вид в плане на фиг. 3 - разрез А-А на фиг. 2J на фиг. 4 - вид Б на фиг. 2.
Грузозахватное устройство содержит раму с направляющими 2, в ко- торьк посредством роликов 3 установ- лены поперечные балки 4, снабженные роликами 5 и пальцами 6. Посредством рычагов 7 балки 4 шарнирно соеди нены с траверсой 8, на которой размещен противовес 9, состоящий из двух частей, установленных с зазором между -ними и рычагами 7. По углам рамы 1 установлены втулки 10, которые .рычагами 1 и 12 шарнирно соединены с балками 4. На раме 1 закреплены так- же упоры 13 и фиксаторы 14 с пружинами 15. В каждой втулке 10 установлена вертикальная штанга 16 с захватной лапой 17, закрепленной на штангй болтом 18 на требуемой высоте.
Для закрепления лапы в одном из исходных положений а или Ь относительно штанги служит болт 19,
Устройство работает следующим образом.
Захватные лапы устанавливают в положение а. Устройство опускают на груз так,что рама 1 опирается на
64г
него. Противовес 9 с траверсой 8, опускаясь, через рычаги 7 раздвигает балки 4 до тех пор, пока пальцы 6 не войдут в фиксаторы 14.
При подг)еме захватного устройства траверса 8 перемещается вверх, сдвигая балки 4. При этом фиксаторы 14 под действием пружин 15 поворачиваются и выходят из зацепления с пальцами 6. Одновременно балки 4 через рычаги 11 и 12 поворачивают на 90 втулки 1 о со штангами 16, лапы 17 поворачиваются в положение Ь, захва- тьшая груз.,
При установке груза в требуемое место рама 1 устанавливается на груз, а противовес 9 через рычаги 7 раздвигает балки 4, поворачивая штанг и 16 и лапы 17 в положение Ч . Пальп) 6 скользят по наружной поверхности фиксаторов 14 и отводят их в сторону, пока они под действием пружин 15 не зафиксируются с пальцами 6. При подъеме устройства штанги 16 И лапы 17 сохраняют положение а , освобождая груз.
Для захвата грузов большей ширины захватные лапы 17 устанавливают в положение Ь и фиксируют относительно штанг болтами 19.
Далее захват груза происходит аналогично, при этом захвЛные лапы поворачиваются из положения Ь в положение с .
Изобретение обеспечивает захват грузов различной ширины при минималь вък операциях по перенастройке устройства .
J- ,
s/
:
SS
6
-/4
Фиг.З
В ид б
Г--Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Грузозахватное устройство | 1980 |
|
SU996319A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1977 |
|
SU709500A1 |
| Грузозахватное устройство (его варианты) | 1981 |
|
SU1008136A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |

| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
