10
15
20
Изобретение относится к пневматическому транспорту, а именно к устройствам для приема и торможения патронов пневмопочты.
Цель изобретения - повьппение надежности.
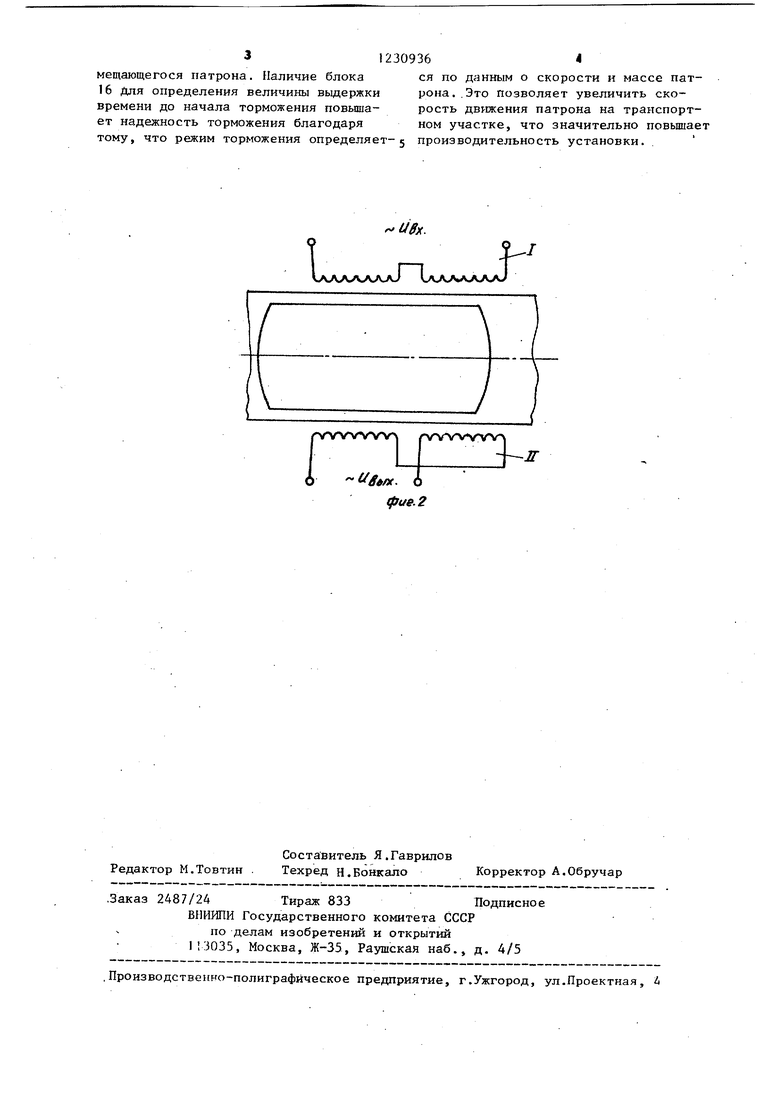
На фиг.1 дана функциональная схема устройства для торможения патрона в пневмотранспортной установке; на фиг.2 - принципиальная электрическая, схема индуктивного.датчика.
Устройство для торможения патрона в пневмотранспортной установке содержит блок 1 управления, одни выходы которого соединены с расположенными в начале и конце пневмобу- фера 2 клапанами 3 и 4 патрубков 5 и 6 сброса воздуха в атмосферу, установленные в транспортном трубопроводе 7 датчики 8 и 9 положения патрона 10, выходы которых подключены к входам блока 11 вычисления скорости патрона 10, расположенные в начале и конце пневмобуфера 2 датчики 12 и 13 положения патрона 10, выходы ко- 25 торых соответственно соединены с одними входами формирователя 14 управляющего сигнала и блока 15 вычисления длительности торможения, другие входы которых соответственно соединены с выходом блока 16 вычисления момента начала торможения и другим выходом блока I управления, и аНа- лого-цифровой преобразователь 17, вход -которого соединен с выходом датчика 9, а выход - с одним из входов блока 16 вычисления момента начала торможения, с другими входами которого соединены выходы блоков 15 и 11. Датчик 9 положения патрона выполнен индуктивным (фиг.2). Блок .вычисления момента начала торможе- , ния выполнен в виде микропроцессора.
Устройство работает следующим образом.
При прохождении патрона 10 мимо датчика 8 с него поступает команда на вход блока 11 на начало отсчета времени. Когда патрон проходит мимо датчика 9, с выхода его поступает сигнал на прекращение отсчета времени в блоке 11. Информация о зафиксированном блоком 11 времени -ut, при неизменном расстоянии L между датчиками 7 и 8 связана со скоростью
1230936
Индуктивный датчик 9 при прохождении мимо него патрона с ферромагнитным грузом генерирует сигнал, пропорциональный массе m патрона 10 5 с грузом, которьй поступает с выхода датчика 9 на вход аналого-цифрового преобразователя 17, а затем в виде двоичного крда в блок 16. По данным о величине скорости и массы патрона и
30
35
с учетом ранее подсчитанного коэффициента адаптации - К в блоке 16 рассчитывается величина выдержки времени до начала торможения
,5 K,mV(H-, ),
где L - расстояние между датчиками
12 и 13;
К| - коэффициент, учитывающий влияние тормозящего воздействия на длительность . торможения.
Эта вьщержка времени отсчитывается формирователем 14 управляющего (Сигнала, который запускается по сигналу от датчика 12. По истечении заданного времени от формирователя 14 поступает сигнал на блок 1 управления, который -перекрывает клапан 4 на патрубке 6 и открывает клапан 3 на патрубке 5. Одновременно подается сигнал на вход блока 15, который отсчитывает фактическое время торможения патрона -ut Эта величина передается в блок 16, где по данным о месте и скорости патрона определяется соответствующая величина заданного времени торможения -и. В блоке 16 рассчитывается величина коэффи- 40 циента адаптации, которая им запоминается и используется при определении режима торможения следующего патрона
45
ДЛ
5
л
- Д I
факт
н-г
2at i
50
Наличие индуктивного датчика, передающего информацию о массе патрона с ферромагнитным грузом посредством аналого-цифрового преобразователя в блок вычисления момента начала тор- 55 можения, расщиряет функциональные возможности устройства, так как поз- воляет корректировать тормозящее воздействие в зависимости от массы перепатрона выражением
V.- лГ,
Индуктивный датчик 9 при прохождении мимо него патрона с ферромагнитным грузом генерирует сигнал, пропорциональный массе m патрона 10 с грузом, которьй поступает с выхода датчика 9 на вход аналого-цифрового преобразователя 17, а затем в виде двоичного крда в блок 16. По данным о величине скорости и массы патрона и
с учетом ранее подсчитанного коэффициента адаптации - К в блоке 16 рассчитывается величина выдержки времени до начала торможения
,5 K,mV(H-, ),
где L - расстояние между датчиками
12 и 13;
К| - коэффициент, учитывающий влияние тормозящего воздействия на длительность . торможения.
Эта вьщержка времени отсчитывается формирователем 14 управляющего (Сигнала, который запускается по сигналу от датчика 12. По истечении заданного времени от формирователя 14 поступает сигнал на блок 1 управления, который -перекрывает клапан 4 на патрубке 6 и открывает клапан 3 на патрубке 5. Одновременно подается сигнал на вход блока 15, который отсчитывает фактическое время торможения патрона -ut Эта величина передается в блок 16, где по данным о месте и скорости патрона определяется соответствующая величина заданного времени торможения -и. В блоке 16 рассчитывается величина коэффи- циента адаптации, которая им запоминается и используется при определении режима торможения следующего патрона
ДЛ
5
л
- Д I
факт
н-г
2at i
Наличие индуктивного датчика, передающего информацию о массе патрона с ферромагнитным грузом посредством аналого-цифрового преобразователя в блок вычисления момента начала тор- можения, расщиряет функциональные возможности устройства, так как поз- воляет корректировать тормозящее воздействие в зависимости от массы перемещающегося патрона. Наличие блока 16 Для определения величины вьщержки времени до начала торможения повьша- ет надежность торможения благодаря тому, что режим торможения определяетт5
1230936
ся по данным о скорости и массе патрона.. Это позволяет увеличить скорость движения патрона на транспортном участке, что значительно повьшает производительность установки. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования нейрона | 1974 |
|
SU519730A1 |
| Устройство для разделения направлений передачи в дуплексных системах связи | 1984 |
|
SU1223373A2 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Устройство дуплексной передачи и приема сигналов | 1987 |
|
SU1515375A1 |
| Устройство для управления сбрасывателем полосы на холодильник мелкосортного стана | 1984 |
|
SU1196055A1 |
| Устройство для ввода информации | 1988 |
|
SU1522190A1 |
| Устройство для взвешивания заготовок | 1991 |
|
SU1824524A1 |
| УСТРОЙСТВО ДЛЯ РЕКУПЕРАТИВНО-ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА ПОДЪЕМНОЙ ЛЕБЕДКИ | 1973 |
|
SU399987A1 |
| Электронная система управления торможением оборудованного двигателем тягача | 1989 |
|
SU1809813A3 |
| Способ торможения патрона в пневмобуфере трубопроводной пневмотранспортной установки | 1982 |
|
SU1096168A1 |

| Способ торможения контейнеров в пневмобуфере пневмотранспортных систем | 1978 |
|
SU742295A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
