Изобретение относится к машиностроению, в частности к захватным устройствам промьшшенных роботов и манипуляторов.
Цель изобретения - обеспечение на дежности работы в широком диапазоне размеров захватываемых деталей.
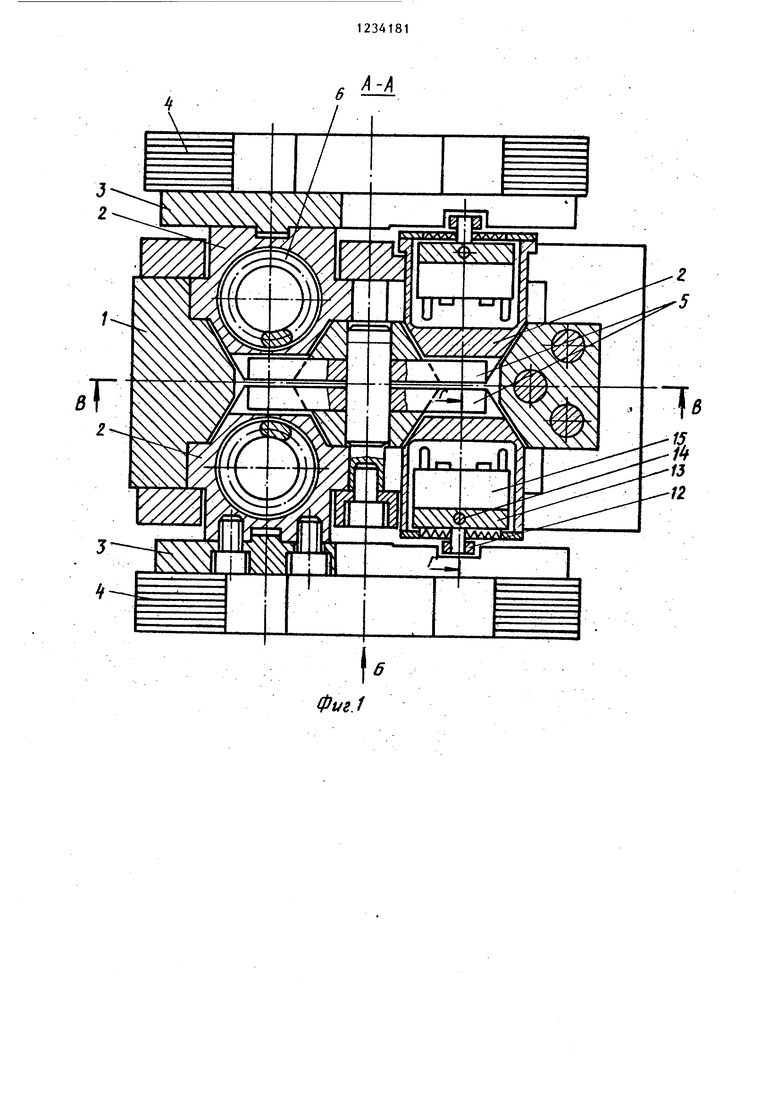
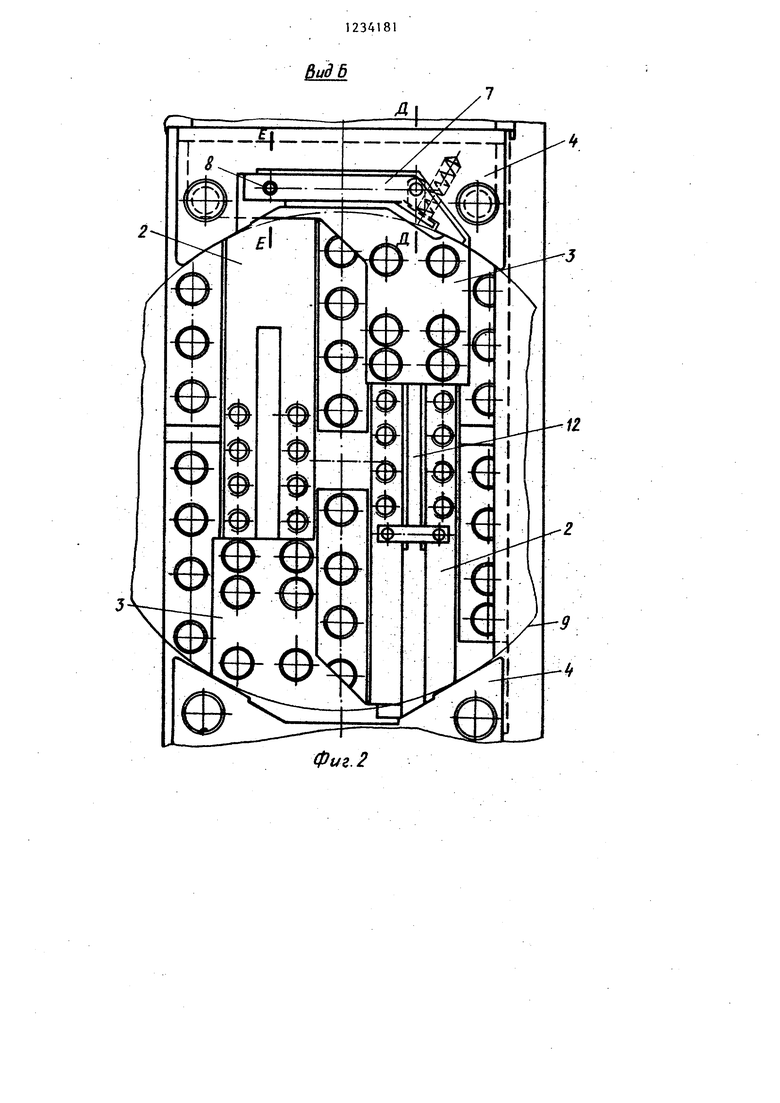
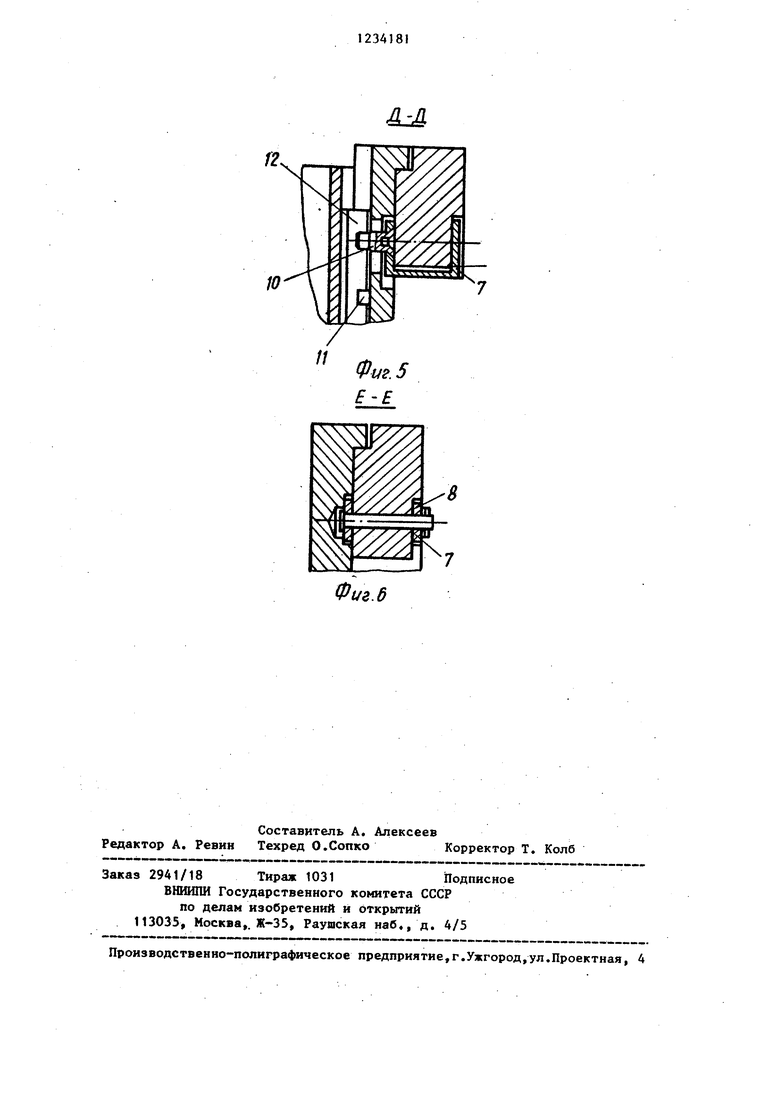
На фиг, 1 изображена нижняя часть схвата, поперечный разрезJ на фиг.2- вид по стрелке В на фиг. 1; на фиг.3- разрез В-В на фиг. 1; на фиг. А - разрез Г-Г на фиг. 1; на фиг, 5 - разрез Д-Д на фиг. 2;на фиг, 6 - разрез Е-Е на фиг. 2,
Захватное устройство содержит корпус 1, в котором размещены ползуны 2, несущие на себе переставляемые башмаки 3 с закрепленньо4и на них губками 4. Ползуны 2 связаны между собой рычагами 5 и находятся под воздействием пружин б. На одной из губок 4 установлен двуплечий рычаг 7, выполненный в виде двух пластин, соединенных перемычкой, поворачивающийся вокруг оси 8. Перекв)1чка, расположенная с наружной стороны губки 4, взаимодействует с захватываемым .изделием 9 (показано пунктиром). ;Планка рычага 7, расположенная с внутренней ctopoны губки 4, снабжена пальцем 10, взаимодействующим с одним из пазов 11, выполненным на тяге 12. Нижний конец тяги 12 свя зан с ползушкой 13, которая пере10
1234181I
мещается по направляющему валику 14, На ползунке 13 установлен микропереключатель 13, выполняющий функции датчика захвата изделия 9
Захватное устройство работает следующим образом.
В исходном положении губки 4 одной стороны захватного устройства под действием гидроцилиндра с тремя положениями (не показан) находятся в разведенном положении, при котором пружина 6 схвата поджата. При необходимости захвата обрабатываемого изделия 9 поршень гидроцилиндра перемещается в среднее положение и под действием пружий 6 губки 4 перемещаются по направлению к захватывае - , мому изделию 9. При этом рычаг 7 поворачивается посредством пальца 10j перемещает тягу 12, которая отводит микропереключатель 15 вверх, освобождая его нажимной контакт, В результате зтого в систему управления роботом выдается сигнал о том, что изделие зажато.
15
20
25
необходимости переналадки захватного устройства на другой диаметр обрабатываемого изделия башма- 30 ки 3 с губками 4 переставляются в требуемую позицию и палец 10 попадает в соответствующий паз 11 тяги 12, благодаря чему связь рычага с тягой 12 и датчиком 15 сохраняется.
необходимости переналадки захватного устройства на другой диаметр обрабатываемого изделия башма- ки 3 с губками 4 переставляются в требуемую позицию и палец 10 попадает в соответствующий паз 11 тяги 12, благодаря чему связь рычага с тягой 12 и датчиком 15 сохраняется.
Фш.1
Вид 6
Фиг. 2
Фиг.З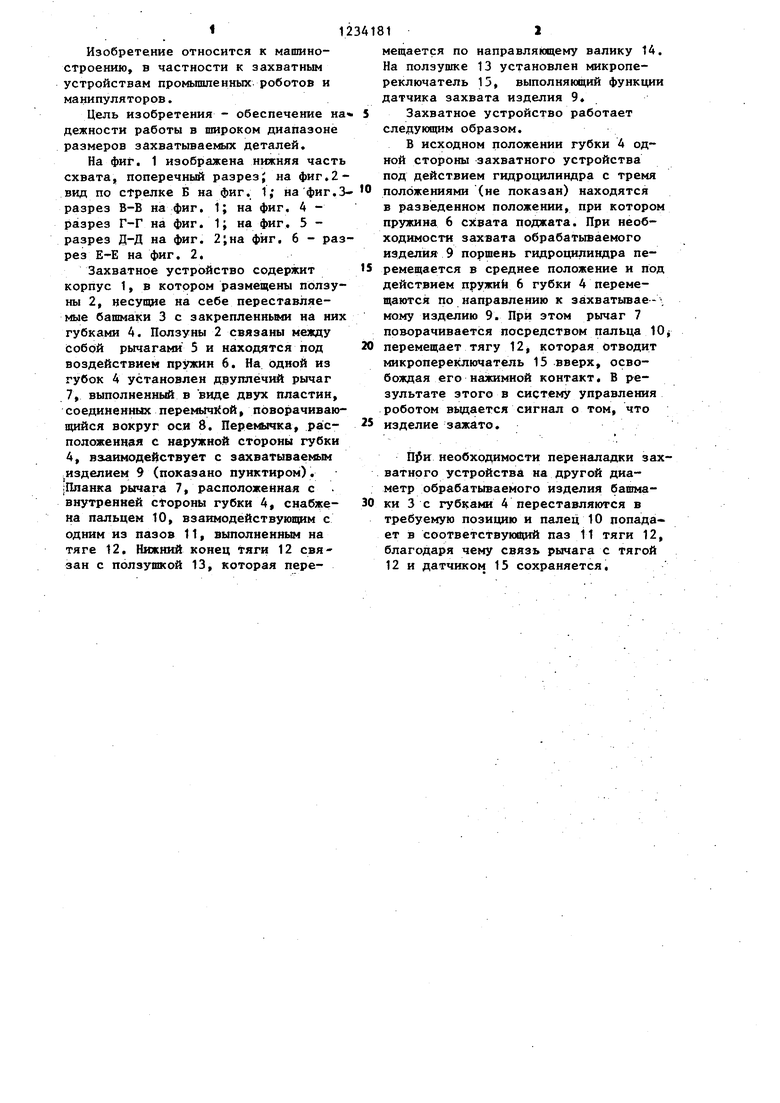
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват промышленного робота | 1983 |
|
SU1098789A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Схват | 1984 |
|
SU1178585A1 |

2
AJ
0ui.S
Составитель A. Алексеев Редактор A. Ревин Техред О.Сопко Корректор Т. Колб
Заказ 2941/18 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва,. Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная, 4
| Схват промышленного робота | 1983 |
|
SU1098789A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
