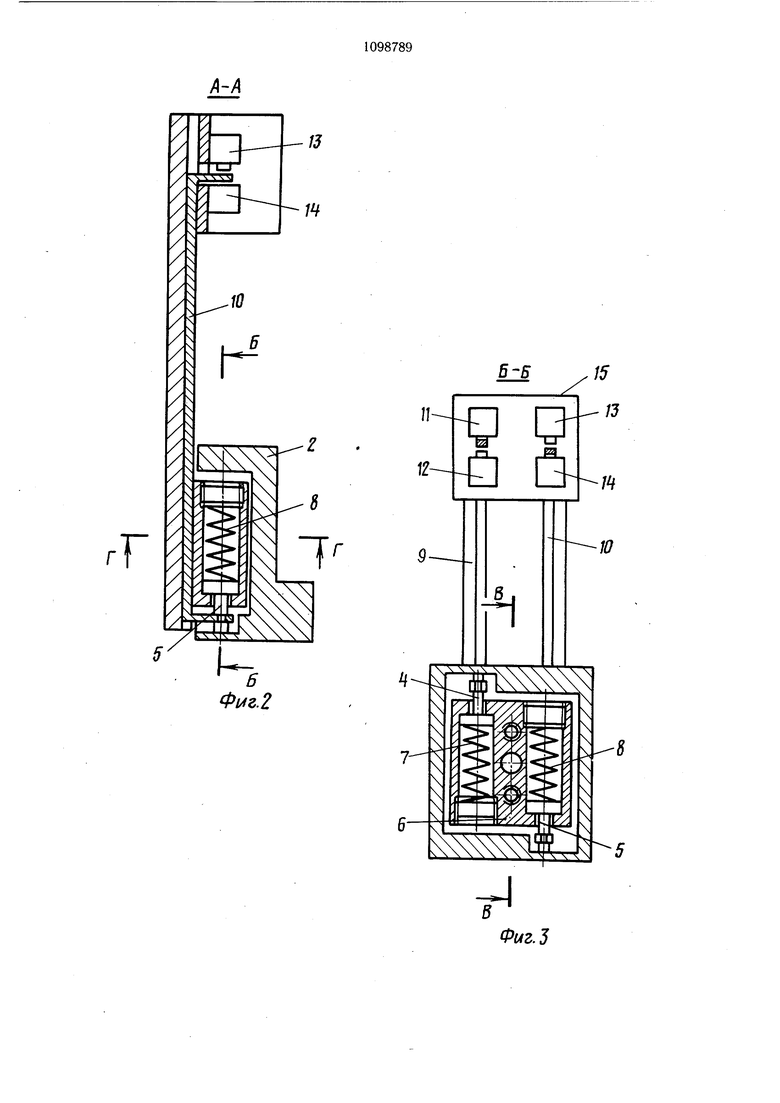
Изобретение относится к машиностроению, в частности к захватным приспособлениям промышленных роботов и манипуляторов. Известно захватное устройство, содержашее захватные рычаги, снабженные губками, и устройство контроля захвата детали, состояшее из датчика и подвижного элемента 1. Недостатком известного устройства; является отсутствие возможности контролировать наличие зажима детали за внутреннюю поверхность изделия при возможности контроля наличия зажима детали за внешнюю поверхность изделия. Кроме того, известное устройство не может быть использовано для самоцентрируюших схватов. Цель изобретения - повышение надежности и расширение технологических возможностей за счет обеспечения контролируемого самоцентрируюшего зажима как за внутреннюю, так и за наружную поверхности детали. Указанная цель достигается тем, что схват промышленного робота, содержащий захватные рычаги, снабженные губками, и датчики усилий сжатия, снабжен направляющей, дополнительной губкой, тягами, сухарем и двумя подпружиненными толкателями, размещенными в сухаре и связанными с датчиками через тяги, причем дополнительная губка установлена в направляющей с возможностью взаимодействия с подпружиненными толкателями. На фиг. 1 изображен схват при .зажиме деталей за наружную поверхность (деталь показана сплошной линией) и при зажиме детали за внутреннюю поверхность (деталь показана штрихпунктйрной линией), общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 2. Схват промышленного робота содержит рейку 1, на которой установлена подвижная губка 2, перемещающаяся по направляющей 3, неподвижной относительно рейки 1. В центральном положении губка 2 жестко фиксируется толкателями 4 и 5, размещенными внутри сухаря 6 и подпружиненными с помощью пружин 7 и 8. Толкатели 4 и 5 соединены через соответствующие тяги 9 и 10 с микровыключателями 11, 12 и 13, 14, расположенными в корпусе 15, установленном вне зоны захвата. Захватываемая деталь 16 удерживается с помощью захватных рычагов 17 и 18, снабженных губками, и рейки 1 с губкой 2. Сухарь 6 установлен на направляющей 3. Устройство работает следующим образом. При захвате детали за наружную поверхность подвижная губка 2 под действием усилия зажима перемещается по направляющей 3 вверх до упора в неподвижный сухарь 6. При этом толкатель 5 также смещается вверх, Сжимая пружину 8. Связанная с толкателем 5 тяга 10 начинает перемещаться в том же направлении, что и толкатель 5, размыкает микровыключатель 14 и замыкает микровыключатель 13. Что касается толкателя 4 и тяги 9, то они все это время остаются неподвижными относительно рейки 1. Связанный с тягой 9 микровыключатель 11 остается замкнутым, а микровыключатель 12 - разомкнутым. При снятии усилия зажима толкатель 5, тяга 10 и подвижная губка 2 под действием пружины 8 возвращаются в исходное положение, при этом микровыключатель 13 размыкается, а микровыключатель 14 замыкается. При захвате детали 16 за внутреннюю поверхность подвижная губка 2 под действием усилия зажима перемещается по направляющей 3. вниз до упора в неподвижный сухарь 6. В результате этого толкатель 4 перемещается вниз, сжимая пружину 7. Связанная с толкателем 4 тяга 9 также движется вниз, размыкая микровыключатель 11 и замыкая микровыключатель 12. В процессе захвата детали 16 за внутреннюю поверхность толкатель 5 и тяга 10 остаются неподвижными относительно рейки 1, микровыключатель 13 - разомкнутым, а микровыключачсль 14 - замкнутым. При снятии усилия зажима толкатель 4, тяга 9 и подвижная губка 2 под действием пружины 7 возвращаются в исходное положение. При этом микровыключатель 12 размыкается, а микровыключатель 11 замыкается. Самоцентрирование схвата при зажатии детали как за наружную, так и за внутреннюю поверхности обеспечивается за счет кинематически связанных рычагов и рейки, а также благодаря определенному положению контактных поверхностей подвижной губки 2, в результате чего геометрический центр зажимаемой детали остается неподвижным относительно корпуса схвата. Предлагаемая конструкция обладает высоким уровнем универсальности за счет обеспечения контролируемого захвата как за внешнюю, так и за внутреннюю поверхности деталей.
Б-Б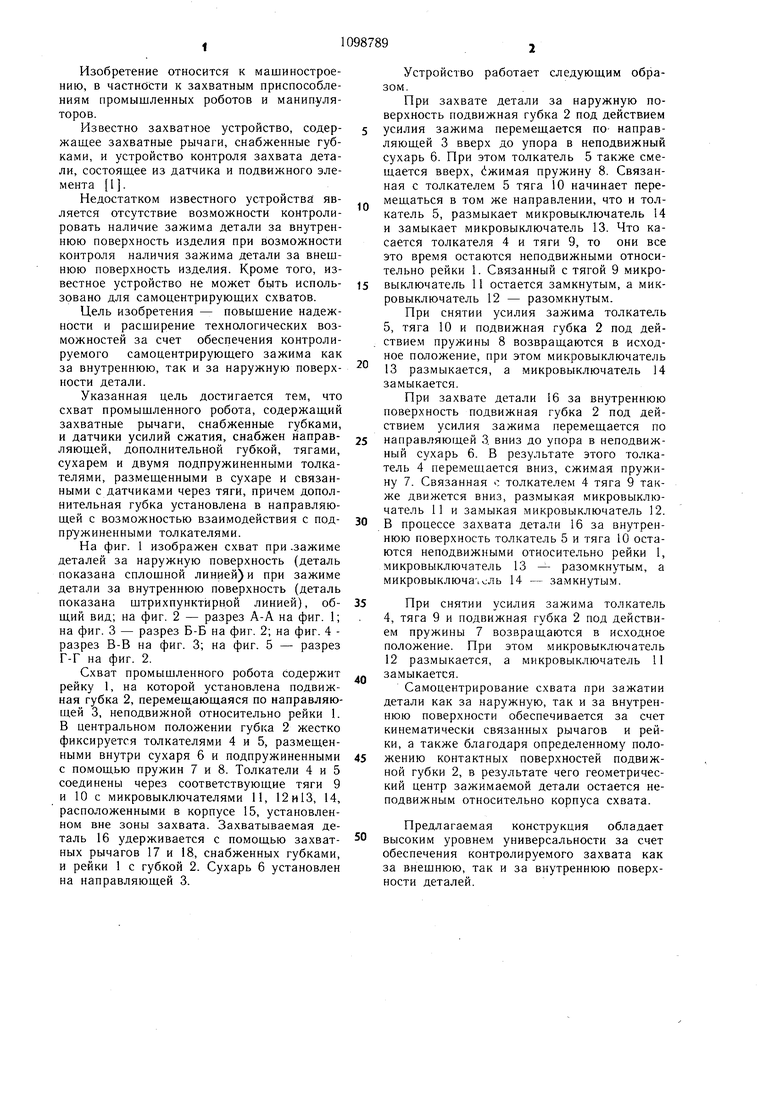
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Адаптивный схват промышленного робота | 1985 |
|
SU1303403A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Схват | 1982 |
|
SU1093543A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
СХВАТ ПРО.МЫШЛ1-;НИОГО РОБОТ.Л, содержащий за.ватн1 1о рыч;и-и. снабженные губками, и датчики уси.1ий сжатия, отличающийся тем, что, с целью повьппеиия надежности и расипфения технологически.х возможностей, он снабжен нанравляюплей, дополнительной губкой, тя1ами, сухарем и двумя подпружиненными TO.Iкателями, размещенными в сухаре и связанными с датчиками через тяги, причем доиолнительная губка уста11овлена в направляющей с возможностью изанмо.км ствня с подпружиненными толкателямн, а сухарь установлен на нанравляющей. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват промышленного робота | 1980 |
|
SU918086A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
