Изобретение относится к транспортной технике, а именно, к устройствам для транс- портно-загрузчно-разгрузочного обслуживания технологического оборудования.
Целью изобретения является расширение технологических возможностей транспортного средства.
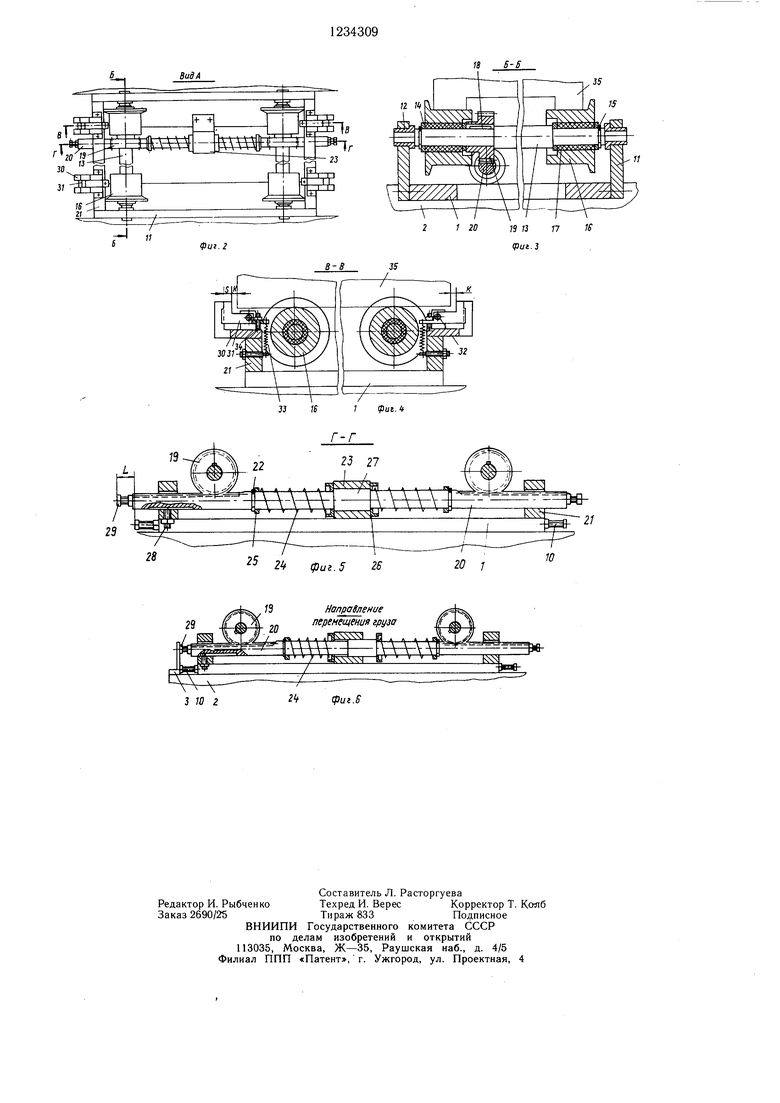
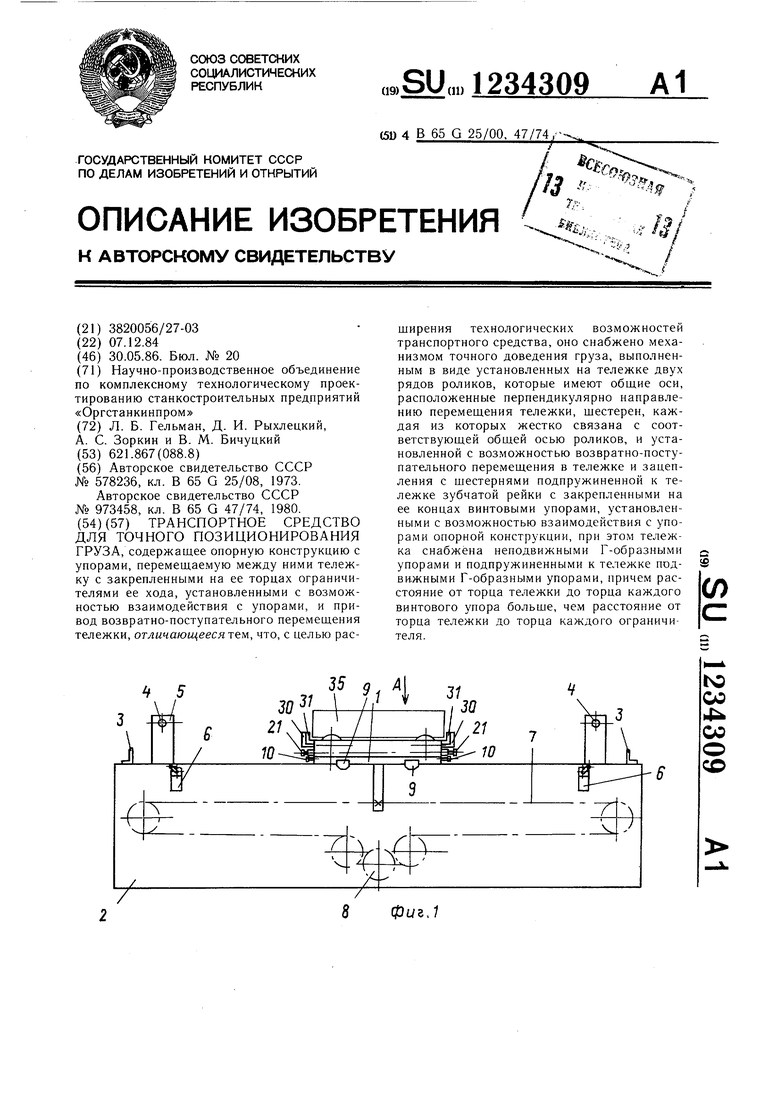
На фиг. 1 изображено транспортное средство для точной остановки, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - элемент механизма точной доводки груза, установленного на тележку до места разгрузки в крайнем левом положении.
Транспортное средство для точного позиционирования груза содержит передаточную тележку 1 (фиг. 1), установленную на опорную конструкцию, выполненную в виде рамы 2. Для перемещения тележки 1 на раме 2 выполнены направляющие (не показаны).
На раме 2 имеются два упора 3, останавливающих тележку и ограничивающих ее перемещение по раме 2. Вблизи упоров 3 установлены также два бесконтактных датчика 4 наличия груза в зонах загрузки и разгрузки тележки 1, закрепленных на раме 2 на кронщтейнах 5. На раме 2 в зонах загрузки и разгрузки тележки 1 установлены два конечных выключателя 6.
Тележка 1 снабжена приводом, выполненным в виде жестко соединенного с тележкой 1 тягового органа 7, связанного через фрикционную муфту (не показана) с редуктором 8 и электродвигателем (не показан). К боковой поверхности тележки 1 прикреплены две нажимные планки 9, контактирующие с конечными выключателями 6. Тележка 1 оснащена с двух сторон жесткими регулируемыми ограничителями 10 хода тележки. На тележке 1 установлен механизм точного доведения установленного на тележку груза до мест разгрузки (фиг. 2), включающий две продольные опоры 11 с подщип- никовыми втулками 12, в которых установлены две оси 13. На концах осей 13 между кольцами 14, закрепленными от осевого перемещения шайбами 15, установлены ролики 16 с запрессованными в них втулками 17 с возможностью поворота вокруг осей 13. Втулки 17 выполнены из металло- фторопласта.
На осях 3 и щпонках 18 установлены щестерни 19, входящие в зацепление с рейкой 20, смонтированной с возможностью продольного перемещения в поперечных опорах 21, закрепленных на тележке 1. На рейке 20 между замковыми щайбами 22 и кронштейном 23, закрепленным на тележке 1, установлены предварительно сжатые пружины 24, с одной стороны упирающиеся в .колца 25, а с другой - в тарельчатые щайбы 26, причем рейка 20 выполнена с буртом 27 с возмож
ностью продольного перемещения в кронштейне 23.
Рейка 20 зафиксирована от проворота стопорным винтом 28, входящим в паз рей- ки 20 и установленным на одной из поперечных опор 21. На торцах рейки 20 установлены винтовые упоры 29. Тележка снабжена четырьмя Г-образными неподвижными упорами 30, выполненными с пазами, внутри которых размещены Г-образные подпружи- ненные упоры 31, смонтированные на осях 32, закрепленных на поперечных опорах 21 тележки. Подпружиненные упоры 31 соединены оттяжными предварительно растянутыми пружинами 33 с поперечными опорами 21 и снабжены регулировочными винтами 34.
Транспортное средство для точного позиционирования груза работает следующим образом.
Груз 35 загружают сверху на ролики 16
передаточной тележки 1, находящейся на одной из крайних позиций (правой или левой).
В случае перемещения тележки 1 справа налево груз 35 загружают справа и разгружают слева.
При загрузке груза 35 от бесконтактного взаимодейстия с последним срабаты- вает правый датчик 4 наличия груза в зоне загрузки и дает команду на включение привода перемещения тележки 1.
Тележка 1 перемещается вправо до взаимодействия левой нажимной планки 9 с левым конечным выключателем 6, который дает команду на остановку электродвигателя.
За счет инерции вращающихся маховых масс электродвигателя и редуктора 8 движение тягового органа 7 и тележки 1 продолжается до соприкосновения левого ограничителя 10 хода тележки с левым упором 3. При этом оставшаяся инерция гасится фрикционной муфтой привода.
Груз 35 после загрузки свободно установлен на роликах 16 и в процессе движения тележки 1 не фиксируется на ней. Между грузом 35 и подпружиненными упорами 31 возможен равномерный зазор, равный 2К, где К - расстояние от каждого из подпружиненных упоров 31 до груза 35.
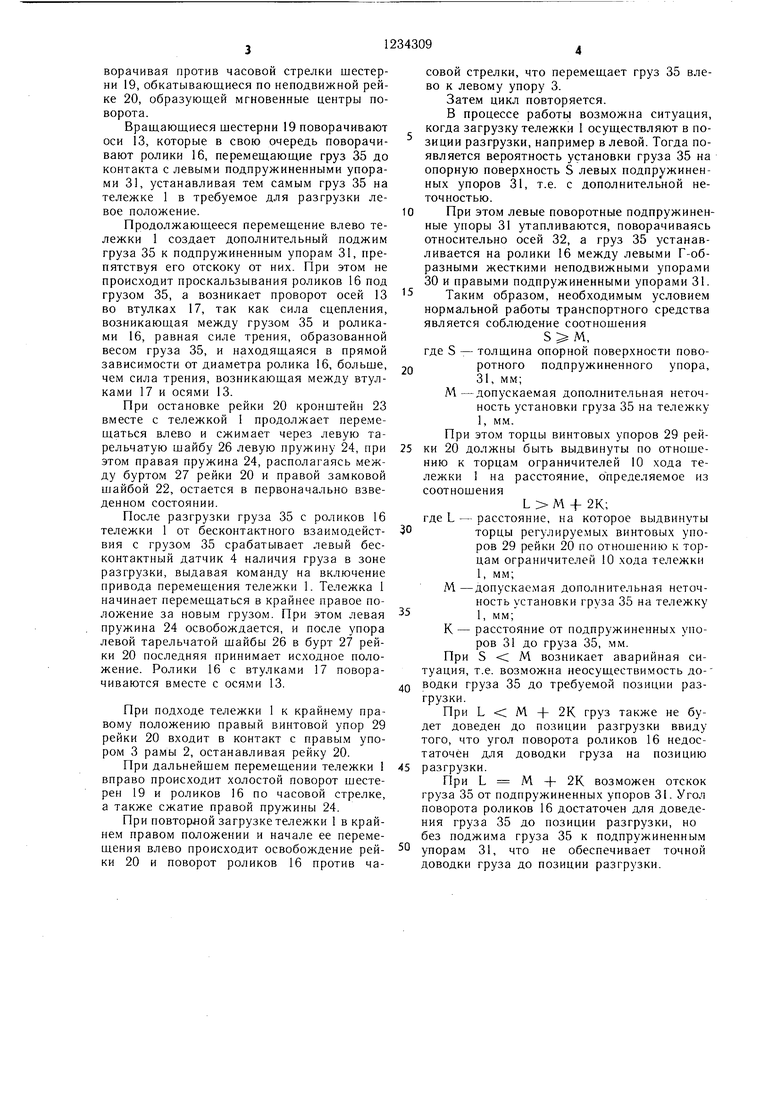
Механизм точного доведения установлен- ного на тележку груза до мест разгрузки настроен таким образом, что правый и левый винтовые упоры 29 в исходно.м положении выдвинуты на расстояние L по отношению к ограничителям 10 хода тележки 1. При подходе тележки 1 к крайнему ле- вому положению левый винтовой упор 29 рейки 20 начинает контактировать с левым жестким упором 3 раньше, чем левый ограничитель 10 хода тележки, останавливая рейку 20. В этот момент происходит включение механизма точной доводки груза до мес- та разгрузки. Тележка 1 продолжает перемещаться влево до контакта левого ограничителя 10 хода тележки с левым упором 3. При этом влево перемещаются и оси 13, поворачивая против часовой стрелки шестерни 19, обкатывающиеся по неподвижной рейке 20, образующей мгновенные центры поворота.
Вращающиеся щестерни 19 поворачивают оси 13, которые в свою очередь поворачивают ролики 16, перемещающие груз 35 до контакта с левыми подпружиненными упорами 31, устанавливая тем самым груз 35 на тележке 1 в требуемое для разгрузки левое положение.
Продолжающееся перемещение влево тележки 1 создает дополнительный поджим груза 35 к подпружиненным упорам 31, препятствуя его отскоку от них. При этом не происходит проскальзывания роликов 16 под грузом 35, а возникает проворот осей 13 во втулках 17, так как сила сцепления, возникающая между грузом 35 и роликами 16, равная силе трения, образованной весом груза 35, и находящаяся в прямой зависимости от диаметра ролика 16, больще, чем сила трения, возникающая между втулками 17 и осями 13.
При остановке рейки 20 кронштейн 23 вместе с тележкой 1 продолжает перемещаться влево и сжимает через левую тарельчатую щайбу 26 левую пружину 24, при этом правая пружина 24, располагаясь между буртом 27 рейки 20 и правой замковой щайбой 22, остается в первоначально взведенном состоянии.
После разгрузки груза 35 с роликов 16 тележки 1 от бесконтактного взаимодействия с грузом 35 срабатывает левый бесконтактный датчик 4 наличия груза в зоне разгрузки, выдавая команду на включение привода перемещения тележки 1. Тележка 1 начинает перемещаться в крайнее правое положение за новым грузом. При этом левая пружина 24 освобождается, и после упора левой тарельчатой щайбы 26 в бурт 27 рейки 20 последняя принимает исходное положение. Ролики 16 с втулками 17 поворачиваются вместе с осями 13.
При подходе тележки 1 к крайнему правому положению правый винтовой упор 29 рейки 20 входит в контакт с правым упором 3 рамы 2, останавливая рейку 20.
При дальнейщем перемещении тележки 1 вправо происходит холостой поворот щесте- рен 19 и роликов 16 по часовой стрелке, а также сжатие правой пружины 24.
При повторйой загрузке тележки 1 в крайнем правом положении и начале ее перемещения влево происходит освобождение рейки 20 и поворот роликов 16 против часовой стрелки, что перемещает груз 35 влево к левому упору 3.
Затем цикл повторяется. В процессе работы возможна ситуация, когда загрузку тележки 1 осуществляют в позиции разгрузки, например в левой. Тогда появляется вероятность установки груза 35 на опорную поверхность S левых подпружиненных упоров 31, т.е. с дополнительной неточностью.
0 При этом левые поворотные подпружиненные упоры 31 утапливаются, поворачиваясь относительно осей 32, а груз 35 устанавливается на ролики 16 между левыми Г-об- разными жесткими неподвижными упорами 30 и правыми подпружиненными упорами 31. 5 Таким образом, необходимым условием нормальной работы транспортного средства является соблюдение соотношения
S М,
где S - толщина опорной поверхности пово- f,ротного подпружиненного упора,
31, мм;
М-допускаемая дополнительная неточность установки груза 35 на тележку 1, мм.
При этом торцы винтовых упоров 29 рей- 5 ки 20 должны быть выдвинуты по отношению к торцам ограничителей 10 хода тележки 1 на расстояние, определяемое из соотношения
L М + 2К;
где L - расстояние, на которое выдвинуты 0торцы регулируемых винтовых упоров 29 рейки 20 по отношению к торцам ограничителей 10 хода тележки 1, мм;
М -допускаемая дополнительная неточность установки груза 35 на тележку 1, мм;
К - расстояние от подпружиненных упоров 31 до груза 35, мм. При S М возникает аварийная ситуация, т.е. возможна неосуществимость до- 0 водки груза 35 до требуемой позиции разгрузки.
При L М + 2К груз также не будет доведен до позиции разгрузки ввиду того, что угол поворота роликов 16 недостаточен для доводки груза на позицию 5 разгрузки.
При L М + 2К возможен отскок груза 35 от подпружиненных упоров 31. Угол поворота роликов 16 достаточен для доведения груза 35 до позиции разгрузки, но без поджима груза 35 к подпружиненным 0 упорам 31, что не обеспечивает точной доводки груза до позиции разгрузки.
5
2« фиг. 5 26
ta s-5
20 7
/ЭНапраелеиие
перемещения груза j) / л . « . ,.
6
NNXXN
3 /fl Z
2tt
фиг.е
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Приемно-отправочная станция установки трубопроводного контейнерного пневмотранспорта | 1982 |
|
SU1094821A1 |
| Устройство для перегрузки изделий | 1990 |
|
SU1773812A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| Устройство для подачи штучных грузов на конвейер | 1976 |
|
SU621629A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Установка для приема, укладки и выдачи преимущественно крупных стержней | 1986 |
|
SU1387268A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| АВТОМАТИЗИРОВАННОЕ МНОГОЯРУСНОЕ УСТРОЙСТВО | 1993 |
|
RU2043277C1 |
| Толкающий конвейер | 1973 |
|
SU578236A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ остановки в заданной позиции тележки с тяговым органом,имеющим упругое звено | 1980 |
|
SU973458A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
