усто
ннл
; на
тсИяобретение относится к области лл- тейного производства,в частности, к устройствам для изготоплепия стержней в нагреваемой оснастке
..,10 ич))|нп мил яи.чи ггги упрощение кип( I |п кипи (I умспыиоине г.чбарнтон.
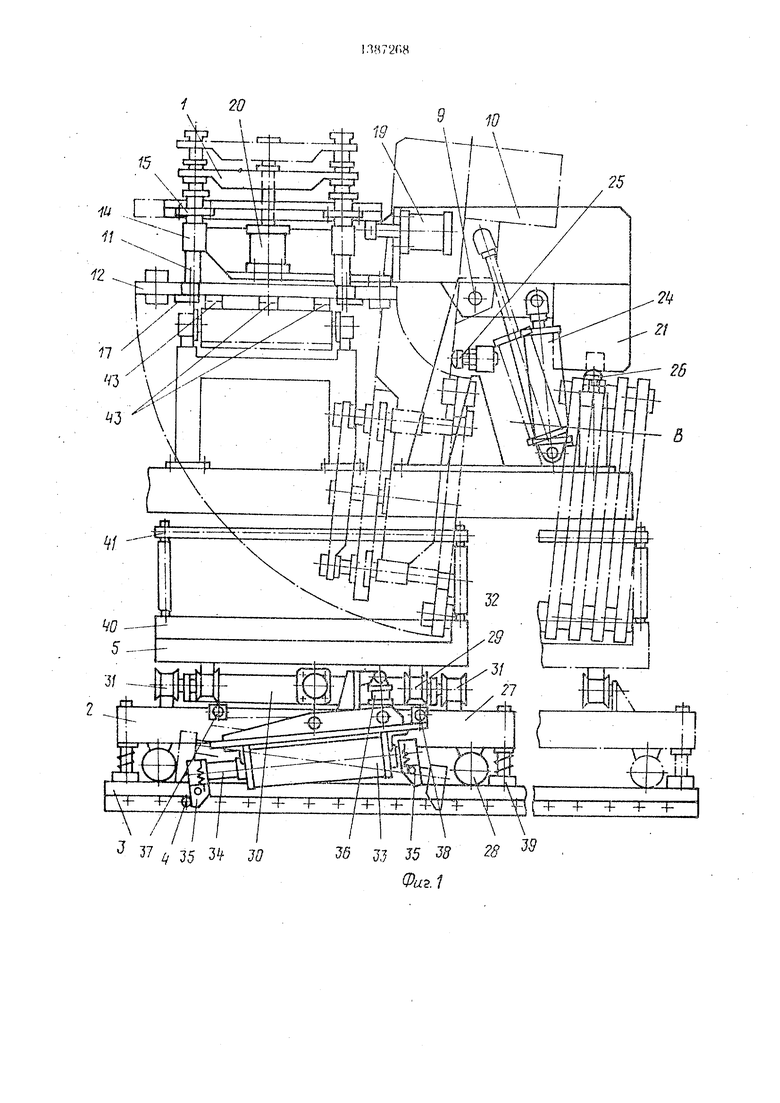
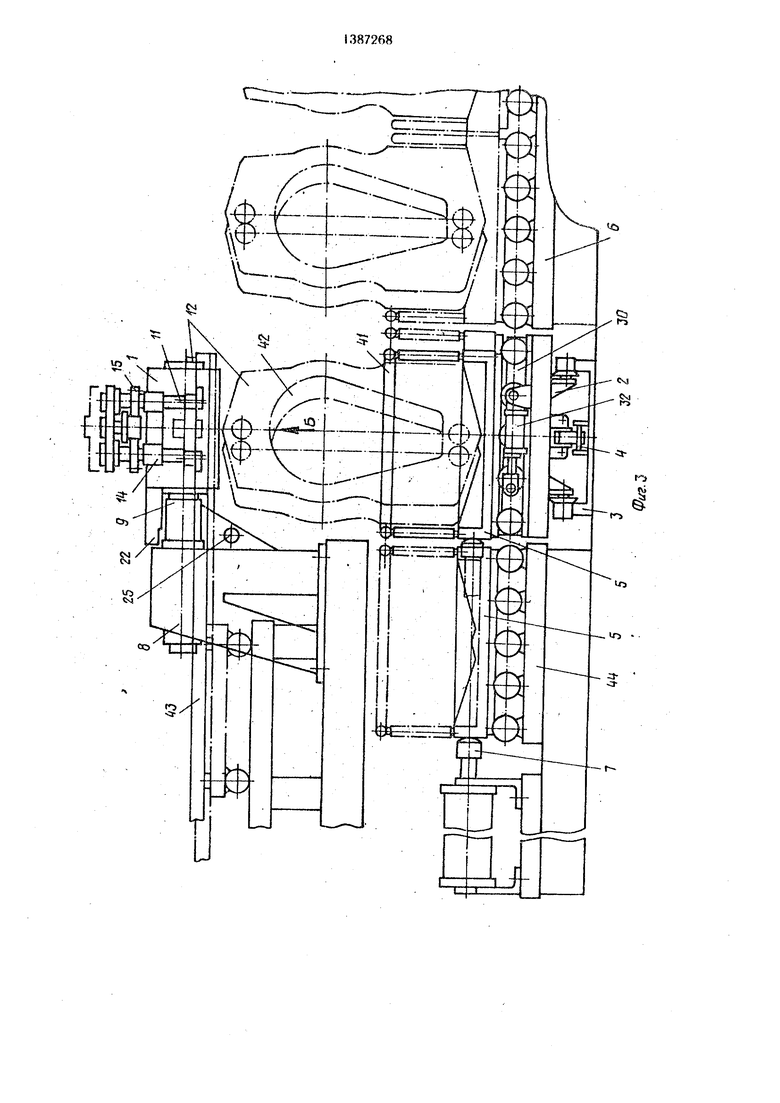
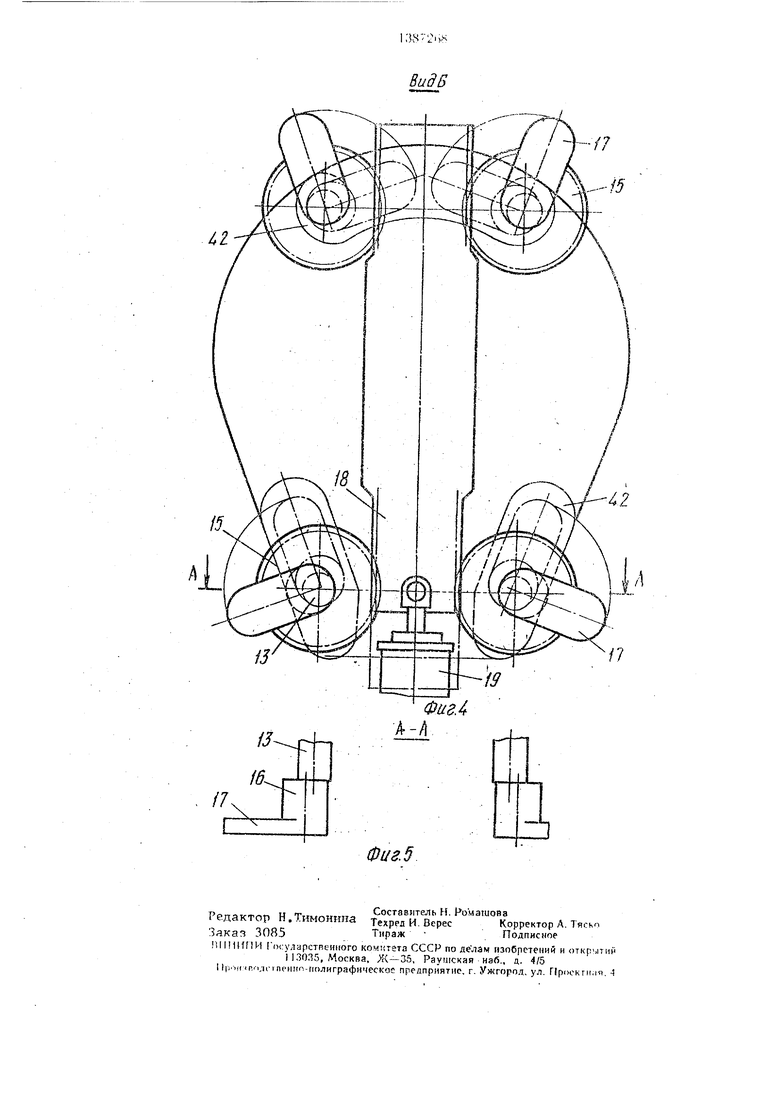
|.ч (()И(. i изображена п ролл а i ас мая |г моика, c)ip()MTa. H)Mbiit вил; ил фиг. 2 жг, ни.ч и иллие; на ({)нг. 3 - то же, сбоку; пя фиг. 4 -- -вил В па фиг. 3; фиг. Г) |)с1;()г:) по Л--Л ка фиг. 4.
Установка содержит мапипулято; 1, . 1СЖ1 у 2, рельсовый путь 3 с осямн-упора- .ми 4. 11е11одг иж 1о устаиоиленпыми с задаи; пым тагом, траис110|)тиые модули 5, траис- иорт-иакопитоль 6 и ирипод 7 гифемешеиия Т|),члс1 ортиых модулС-й 5 на трапспорт-ка- Koiun cJib (i. Манипулятор 1 состоит из опорной р,-)М,| 8, на горизонтальной оси 9 которой смонти)опана новоротная рама 10 со. истросинымн на нее онорами II для нгй 12. Каждая опора II содержит первую ча(гп 13, «строенную в нанравлйюгдую 14 ново ютной рамы 10 и несущую шестерню 15, и соединенную с Hcfl и эксцентрично к ней расположенную вторую часть 16, несу Н1ую рыча 17, расноложенный с заданным yr;ioM к осям первой 13 и второй 16 частей. В ноноротной раме 10, кроме того,установлены рейка 18, входян1ая в зацепление с нюстернямн 1Г), прпвс)Д 19, поворота, вза10
15
20
25
имоденстпуюшчй с рейкой 18 и привод 20 (ения, взаимодойс гпуюгний с онорами 11. rionopOTtiaji рама 10 несет противовесы 21, упоры 22 и 23 и соединена со штоком цилнмяра поворота 24, который другим ксхщом соединен с onopHoif рамой 8.
Кроме тг)г(), на оноррюй раме 8 установ- леН1.| регулируемые упоры 25 и 26. Тележка 2 состоит нч Г1.г1атформы 27 с катками 28 и роликами 2У. Лополнительная тележка 30 имоет ро.пикн 31, привод 32. Припод 33 для нергмсп ения т( лежки 2 выполнен а виде ноиоротиого ни.тиндра с двумя штоками 31. на к.аж;1ом из которых установлена нод- пружипспная собачка 35, и привода-36 по-- ворота 33.
PC гулируе.мыс упоры 67 и 38 фиксируют нриьг.п. . 13 в том или ином по. южении, а подпружиненные бангмаки 39 препятствуют самонроязнольпому смещению тележки 2.
Транспортный модуль 5 состоит из основания 10 и торн.епых н боковых съемных столок or )аничпк лей 41. Подготовленные из автоматической липни (Угсржнн 12 с окнами 42 поьжжя H;t Г1о.ннин1 маиипу.тягора 1 планк; ..м;| Л Усг.чпоики снабжена позицией 11.
30
35
40
45
50
o;-Kn; .a;iiii
Уст :i;;
.()М.
- Ч
но:ч1г-ро nieiu ) .
iHHv 1-1 гяк. что 1.1Ч,|; и |7 гп |,() Ht iipo(i;i rr cKnoTi, окна 42 ci p/кня 12. . ик м приж. л rifXiopoT.f ) iM pcMei iaf T рейку 1 которая м). 1П1.ан Н сс1ернч l. i, nono- р,(.Ч .ч опоры И и. -лсл.оватгльно. рычаг И 17 па талаиный угол. Далее нланкн 43 опус- каи)гся р. нижнее положение, остагьчяя по нутп стержень 12на рь(чагах 17, и удаляются с позиции манипулятора 1. Цилиндр поворота 24 )1нчивагт нопор(Л-ную раму 10 BOKpyi горизонтальной пси 9 на угол, близкий к 90 так, что упор 22 доводится до регулируемого упора 25 опорной рамы 8. 1)о время нсворотя сгержень 12 смен(а- ется но рыча1 а.м 17 и зависает на вторых частях 16 опор 1I так, что в конце поворота между стержнем 12 и основанием 40 транс но(1тного модуля 5 остается зазор в несколько миллиметров
.Привод новорота 19, возлейсгвуя на рейку 18 и HiecTepHH 15, новорачи ет опоры
1I в исходное но. южение.. При этом бла- 1 одаря эксцентриситету, имеющемуся между первой частью 13 и второй частью 16 опор
11,стержень 12. устанавливается на основании 40 транспортного модуля 5 с неболь- ппш наклоном к вертикали, опираясь на торцевую стенку-ограничитель 41, а между окнами 42 стержня 12 и вторыми частями 16 опор II возникает зазор. Привод перемещения 20 перемещает опоры II в направляющих 14 в исходное положение и выводит вторые части 16 с рычагами 17 из стержня
12,после чего .привод поворота 24 возвращает поворотную раму 10 в исходное положение так, что упор 23 допч1;1чтся до регулируемого упора 26. После этого цикл работы манипулятора I повторяется. Левый HITOK 34 с подпружиненной собачкой 35 находится в нижнем положении. Привод 33 делает ход, собачка 35 унпрается в ось- упор 4 и при выдвижении штока 34 тележка
2переменлается на (наг, фиксируемый подпружиненными башмаками 39 и равный тол- uwne стержня 12. Шток 34 возвращается в исходное положение и левая собачка 35 проскакивает вторую ось-упор 4, подготавливая перемещение тележки рольганговой 2 на очередной нтг. Одновременно с этим привод 32 перемещает дополнительную тележку 30 по роликам 31 тележки 27 в перпендикулярном к ней напранлончи. Каждой очередной подаче стержня 12 манипу;1ятором I в транспортный мо,чуль ; преднгествует продольное 1еремеп1.ение гс. 2 на niar, равный толпи1пе стержня 12, ч смешение донолните.льной тележки . /,) Г1тиогнтельно
.41, ; (1о1аст с. те.т юп1им обра-тележки 2 в п( рне 1лику.|. j I |) к пей наI HI. I . И.С ИКЯ .-И
.( ИНН v/M rfip;r 1
I -ivrVHC-г .t
I -f П(.JЛяerl:я на Прпппл г еремеi i и 1.Ч РЯНЛЯЮ55 правлорши (1опер М(( | CTOpoHi i на ne..)rv. н , Н1ую 1нирину HLicivnai ия 12.
4i
;.;м положные превьппзю,:. | и 1:Т(фЖ
-
10
15
20
25
30
35
40
45
50
iHHv 1-1 гяк. что 1.1Ч,|; и |7 гп |,() Ht iipo(i;i rr cKnoTi, окна 42 ci p/кня 12. . ик м приж. л rifXiopoT.f ) iM pcMei iaf T рейку 1 которая м). 1П1.ан Н сс1ернч l. i, nono- р,(.Ч .ч опоры И и. -лсл.оватгльно. рычаг И 17 па талаиный угол. Далее нланкн 43 опус- каи)гся р. нижнее положение, остагьчяя по нутп стержень 12на рь(чагах 17, и удаляются с позиции манипулятора 1. Цилиндр поворота 24 )1нчивагт нопор(Л-ную раму 10 BOKpyi горизонтальной пси 9 на угол, близкий к 90 так, что упор 22 доводится до регулируемого упора 25 опорной рамы 8. 1)о время нсворотя сгержень 12 смен(а- ется но рыча1 а.м 17 и зависает на вторых частях 16 опор 1I так, что в конце поворота между стержнем 12 и основанием 40 транс но(1тного модуля 5 остается зазор в несколько миллиметров
.Привод новорота 19, возлейсгвуя на рейку 18 и HiecTepHH 15, новорачи ет опоры
1I в исходное но. южение.. При этом бла- 1 одаря эксцентриситету, имеющемуся между первой частью 13 и второй частью 16 опор
11,стержень 12. устанавливается на основании 40 транспортного модуля 5 с неболь- ппш наклоном к вертикали, опираясь на торцевую стенку-ограничитель 41, а между окнами 42 стержня 12 и вторыми частями 16 опор II возникает зазор. Привод перемещения 20 перемещает опоры II в направляющих 14 в исходное положение и выводит вторые части 16 с рычагами 17 из стержня
12,после чего .привод поворота 24 возвращает поворотную раму 10 в исходное положение так, что упор 23 допч1;1чтся до регулируемого упора 26. После этого цикл работы манипулятора I повторяется. Левый HITOK 34 с подпружиненной собачкой 35 находится в нижнем положении. Привод 33 делает ход, собачка 35 унпрается в ось- упор 4 и при выдвижении штока 34 тележка
2переменлается на (наг, фиксируемый подпружиненными башмаками 39 и равный тол- uwne стержня 12. Шток 34 возвращается в исходное положение и левая собачка 35 проскакивает вторую ось-упор 4, подготавливая перемещение тележки рольганговой 2 на очередной нтг. Одновременно с этим привод 32 перемещает дополнительную тележку 30 по роликам 31 тележки 27 в перпендикулярном к ней напранлончи. Каждой очередной подаче стержня 12 манипу;1ятором I в транспортный мо,чуль ; преднгествует продольное 1еремеп1.ение гс. 2 на niar, равный толпи1пе стержня 12, ч смешение донолните.льной тележки . /,) Г1тиогнтельно
55 правлорши (1опер М(( | CTOpoHi i на ne..)rv. н , Н1ую 1нирину HLicivnai ия 12.
Таким образом, обеспечивается последовательное компактное заполнение транспортного модуля 5. После того, как это за-, полнение закончено, транспортный модуль 5 совмещается с транспортом-накопителем 6. 5 Прнвод 7 перемещает заполненный стержнями транспортный модуль на транспорт- накопитель 6 и одновременно с этим подает на тележку 2 пустой транспортный модуль, который был заранее установлен на позиции ожидания 44 перед приводом 7.
Привод 36 приводит правый шток 34 с собачкой 35 привода 33 в нижнее положение и при возвратно-поступательном перемещении штока 34 его правая собачка 35
содержащая опорную раму, подвижную ра му, транспортный модуль, средство л.пя перемещения транспортмог о модуля по рсль- сооому пути, и транспорт-накопитель с приводом перемещения на него транспортных модулей, отличающаяся TC.NT, что. с целью упрощения конструкции н умснылския га- . баритов, она снабжегга опорами с п|)япода- ми перемещения н поворота пдпль и noic- Q руг вертикальной оси. размри1еннымн на подвижной раме, которая установлена с пол- можностью поворота относительно горизонтальной оси, а осями-упорами, закрепленными с заданным тагом на рельсовом пути, при этом транспортный модуль
взаимодействует с осями-упорами 4, по- 15 npeACTaBjiaerr собой тару со съемными стен- следовательно шагами перемещает тележ- нами, а средство для перемещения транс- ку 2 в исходное положение, в котором при- портного модуля - тележку с поршневым вод 36 приводит левый штбк 34. с собачкой приводом двухстороннего .действия, установленным с возможностью качания вокруг 2Q горизонтальной оси и имеющим подпружиненные собачки, закрепленные на штоках поршневого привода и размещенные над , осями-упорами.
35 в нижнее положение н все начинается сначала.
Транспорт-накопитель 6, длина которого определяется в каждом конкретном случае, позволяет осуществить разрядку высокбпроизводительным стержневым оборудованием н промежуточным складом стержней, куда цеховыми транспортными сред- 25 ствами впоследствии подаются транспортные модули. Быстро и легко съемные боковые стенки транспортного модуля обеспе чивают удобный допуск к стержням для их разгрузки.
2: Установка по п. I, отличающаяся тем, , что, с целью обеспечения более компактной укладки стержней в транспорт- 11Ый модуль, она снабжена дополнительной приводной тележкой, размещенной на основной, при этом оси тележек пррпеидику- 20 лярны друг к Другу.
3. Установка по п. I, отличающаяся тем, что, с целью обеспечения фиксации тележки на рабочей позиции, она снабжепа подпружиненными башмаками, смонтированными на основной тележке.
Формула изобретения
1. Установка для приема, з кладки и выдачи преимущественно крупных стержней.
содержащая опорную раму, подвижную ра му, транспортный модуль, средство л.пя перемещения транспортмог о модуля по рсль- сооому пути, и транспорт-накопитель с приводом перемещения на него транспортных модулей, отличающаяся TC.NT, что. с целью упрощения конструкции н умснылския га- баритов, она снабжегга опорами с п|)япода- ми перемещения н поворота пдпль и noic- руг вертикальной оси. размри1еннымн на подвижной раме, которая установлена с пол- можностью поворота относительно горизонтальной оси, а осями-упорами, закрепленными с заданным тагом на рель25
2: Установка по п. I, отличающаяся тем, , что, с целью обеспечения более компактной укладки стержней в транспорт- 11Ый модуль, она снабжена дополнительной приводной тележкой, размещенной на основной, при этом оси тележек пррпеидику- 20 лярны друг к Другу.
3. Установка по п. I, отличающаяся тем, что, с целью обеспечения фиксации тележки на рабочей позиции, она снабжепа подпружиненными башмаками, смонтированными на основной тележке.
37 J5 0
тл
J5 JJ J5 38 28 Фи.1
10
25
26
Q Г s-p-J,
С.-)
f -L:LL.
CXI
«G
42
Ь-/7
--15
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| КАМЕРА ДЛЯ РАЗДЕЛКИ ДВУХПУЧКОВЫХ ТОПЛИВНЫХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1990 |
|
SU1819479A3 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Накопитель деталей | 1979 |
|
SU882723A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Манипулятор | 1985 |
|
SU1313687A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |

Изобретение откосится к области литейного производства., в частности, к обору- доваипю для и.чготовлекия стержней в нагреваемой оси9сгке. Мель изобретения - упрощение комс-трукнии и уменьшение габаритов. Установк 1 лля приема, укладки и выдачи крупных имеет маиип.уля- тор I, тележку 2, уп.иювлснпую на рельсовом пути 3, трян .-иог тный модуль 5, трянс ---: 3-; SL:r-r:r.y-sa трт-лгтгг л.:55.. . порт-накопитель. Стержень 12 планками 43 подается па позицию манипулятора 1. ы чаги опор П заводятся сквозь окна стержня, разворз--;иэа1отсл и npniniMaiOT на ссС)я стерл ень. Повороп. ап рама 10 ра пспорачпзает стержо ь н ;:р пмди ei o из горизопталы-ого г;оложсия-л в близкое к перти.кг.льному. При этом между нижним тори.ог-, стержня и дном трл спортио|-о модуля 5 создается небольгпой ..азпр. Нри повороте опор в исходное положение благодаря наличию эксцентриситета стержень опусхается. укладыпается на дно транспортного моду-ля 5, а между опорой 1 I и окнами стержня возникает зазор. Рычаги окор 11 выводятся из стержней, и поворотная рама возвращаетсп в исходное положение. Тележка 2 с помощью привода, пзаимггючствую- щего с ося,п -уггара,ми 4 рельсовою ЛУГИ 3, последовательно перемещает тран(Г1() модуль 5 за ка;кдый цикл раПот. манииу лятора на один шаг, толиппи- гм.)- ня. При этом платформа тележкп v- ipaiic- портпыл модулем совершает с . ник- лорл поперечное, пepe eщeflиг и.- мичян , 1 есколько большую, чем высгуп:; ои;ич члсть стержия, что обеспечивает бо. 1со . i.TnyHi упаковку стержней D транспортном . 2 3.it. di-лы 5 ил. (.о f.-00 xs ю
| Авторское свидетельство СССР № 888390, кл | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Авторское свидетельство СССР NO 824543, кл | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Авторское свидетельство СССР № 1005370, кл | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Установка для приема, укладки и выдачи стержней | 1984 |
|
SU1249775A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
