Изобретение отиоси гс я к г орной промьип- ленноети, а именно к обо)уд)ванию пластовых месторождений полезных ископае- м ы X.
Целью изобретении яв.1яетея иовьииение производительности, надежности и енижение трудоемкости работ.
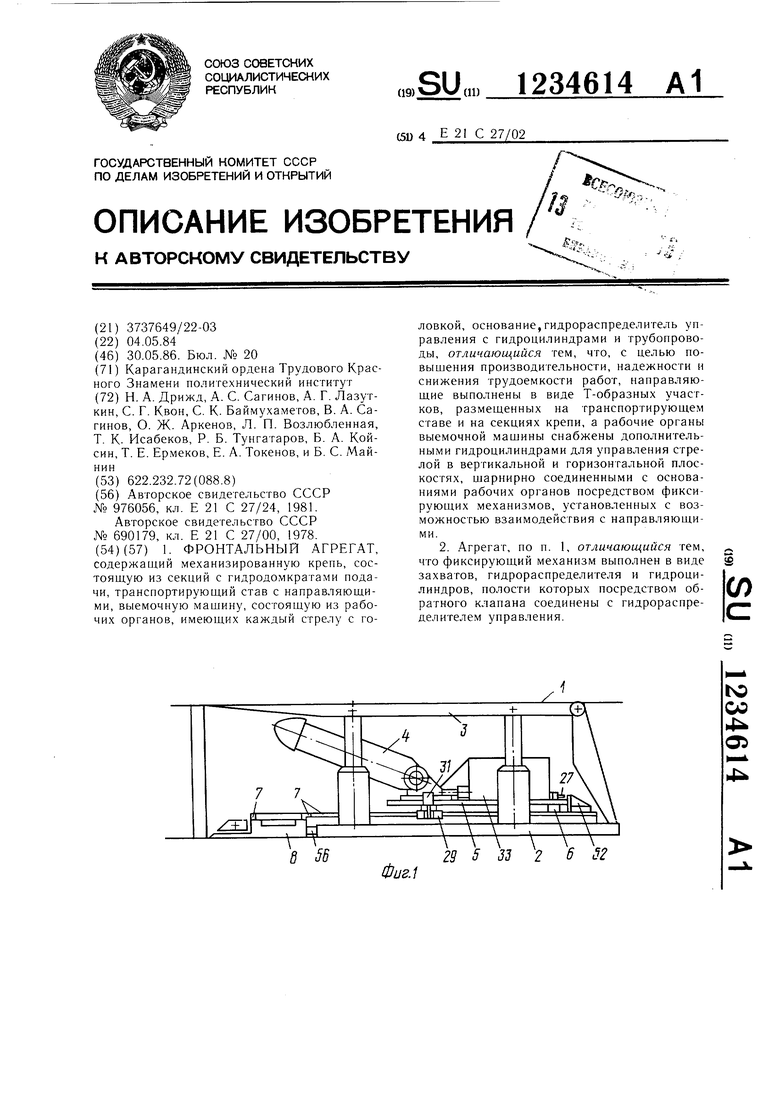
На фи1 . 1 схематически показан агрегаг. внд; на фиг. 2 то же, план; на . 3 конструктивная схе.ма направляю- HU1X и система их уирав. амшя; на фиг . 4 вид А на фиг . 2; на (})иг. 5 -- система управления манинулятором.
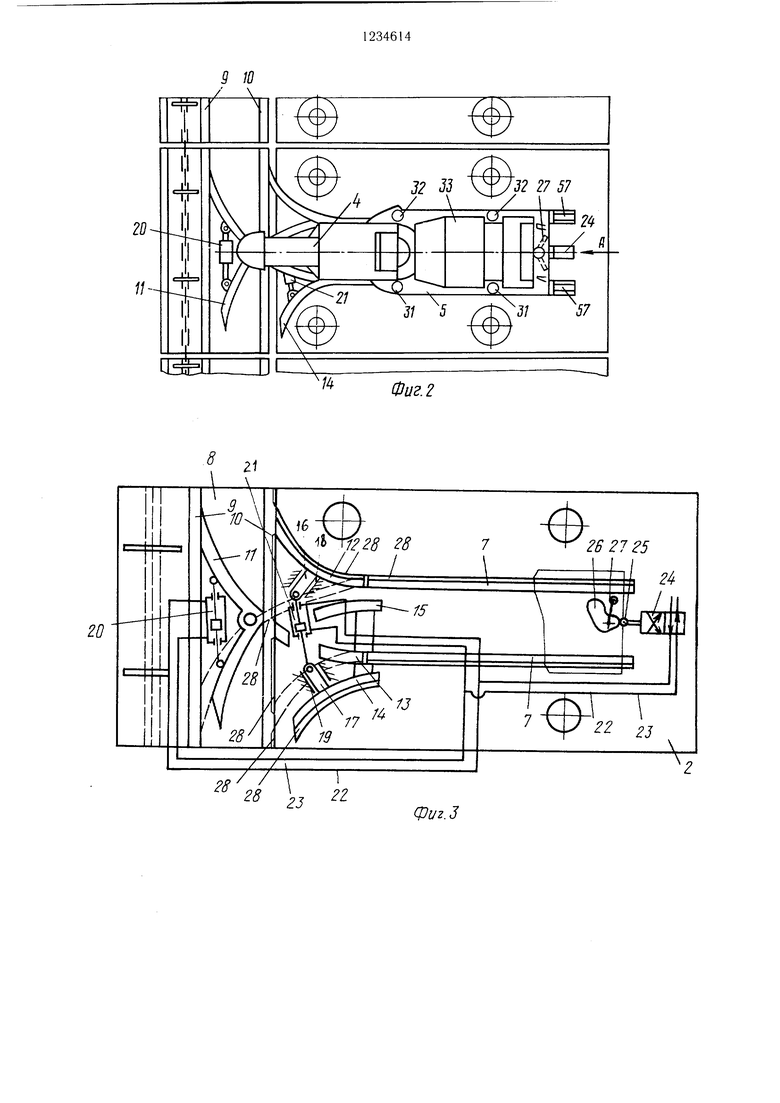
Фронтальный агрегат содержит секпни механизированной крени 1 с основанием 2 и перекрытием 3, стрелу с головкой мани- ну.;1ятора 4, расположенные на основании Г), ;|ыжи б, направляющие 7 транспортирующего става 8. На 1рав;1яюн1ие имеют 11)ямоли- нейные учас1 ки 9 и И), расп(),:1оженные на транспортирук)П1,ем ставе, подвижные криво- .линейные участки I и расположенные на основании 2 секции крепи подвижные )- линейшяе учаетки 12, 13 и 14, 15 с шинами 16, 17, расположенными в наирав- ЛЯЮП1ИХ пазах 18, 19с гидрО 1и. 1индрами 20 и 21, управ,:|ения, трубопроводы 22 н 23, сое- динепп1)1е с 1Д1дро|)ас 1реде,пите;1ем 24, ру- к()ят)К) 25, нзаи 1одействуюн1ей с кулачком 26, связанным с рукоятью 27 посредством оси нро11у пенной через основание 5.
На криволинейных и 11рямо,;1И11ейньгх учаетках имеются 1 а 1рав;1яюн1ие 28, взаимо- действук)П1ие с захватами 29 и 30, yiipaEi. iHc- м 1)1 м и г и дро ИИ л и н др а м и.
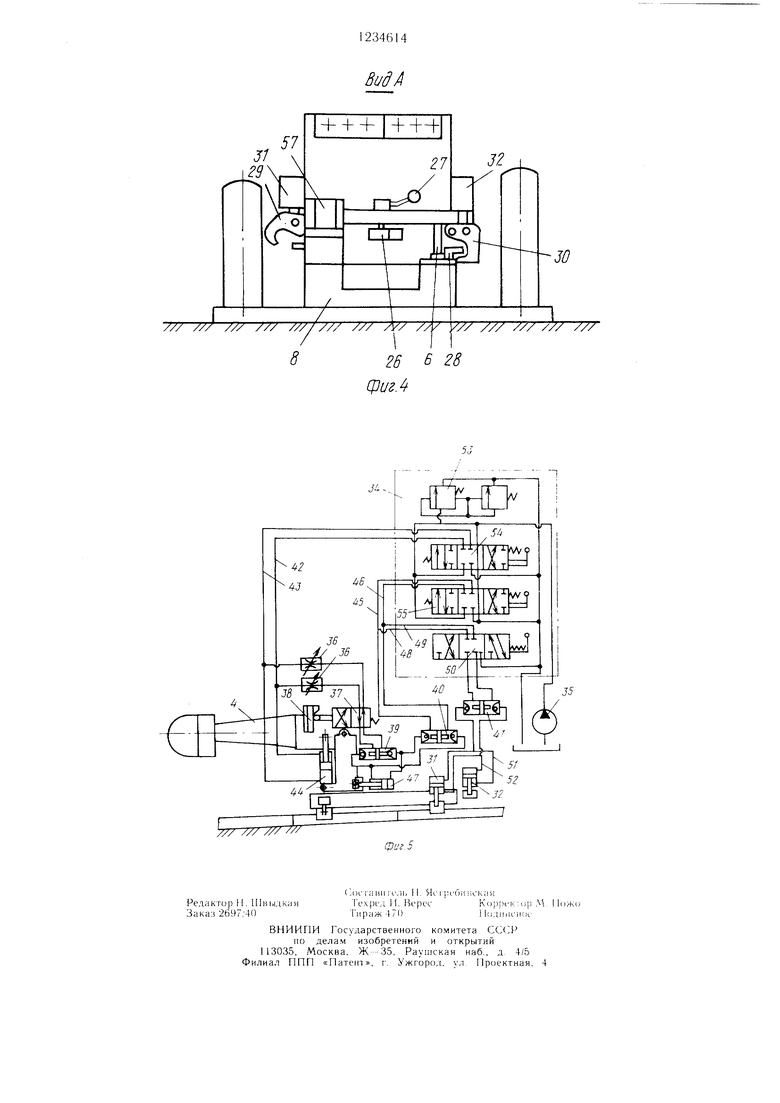
На основании 5 манину,тятора устаиов.:1е- но оборудо Ш11ие 33 управлепия. Гидроснсге- ма унра 5лепия еостоит из гидроблока 34 ун- равлеиня стрелой и головкой мани11улят()ра 4, насоса 35, )егу;|ятора 36 потока, )аспре- делите;1Я 37, взаимодействующего с ку,тач- ком 38, обрат| ых KJianaiioii 39, 40 н 41, т)у- бопроводов 42, 43, 45, 46, 48, 49 гидроии- линдра 47 поворота, трубопроЕаддов 51, 52. Гидроб. юк управлепия состоит из предохра- нител1)Пог() клапана 53, секции управлепия | идроцили драми 54 ггодт.ема-опускаиия секции 55 упра1,:|ения поворотом стре. пя манипулятора 4.
Транспортируюн1,ий став 8 соединен с ос- нованием секции крени 3 11осредсг)м гндро- цилиндра 56.
На основании секции крени 2 жестко установлены упоры 57.
0 5
0
5
0
5
.; грегат работает с;1едук)цям образом,
В исходном но,1оженин манииуляторы находятся псх 1 секцией крепи (фнг. 1, 2), Рукоять 27 нове 5ну 1 а на 1е()бх()димое по, 1ожение, например на не нл1е1ценне naripaBO. В этом псхюженпн ку.тачок 2(5, )заимодействуя на П коять 25 |1асн)еде,:1ите,тя 24, нодает рабочую жидкость но грубонроводу 22 на 1 идро- цн.1нндры 20 и 21. Нод воздействи. м нере- мен1а1он1нхся HITOKOIS этих Г11д)оцн,1индров н())1е крн1и),;1инейные учасгки ианрав- ЛЯЮН1ИХ 11, 12 и 13 н. ютно прижимаются к нрямолинейн)1м участкам нанрав,тяю- И1ИХ 9, И) и гем самым напра1, 1ЯЮ1цие дают возможность манипуляторам двигаться вправо.
При этом одновременно нриводятся в рабочее по.южепие правые захваты 30 ((|)иг. 4). ,., ЭТО1Ч) ((})И1 5) от секцни 55 уп- :1ав,тения рабочая жидкость но трубопроводам 46, 49 через раснреде.ш re, ii, 50 и обрат- 1ЫЙ кланан 41 но грубонро1)ду 52 нодаетея на гидроци 1индры 31 н 32, тем самым захвати 30 ирнЕюдятся в рабочее ио.южение, а захваты 29 В1)1водятся из рабочего иоло- жения. Однов|К менно )абочая жидкость по трубопроводу 46 через обрашый к,панан 40 нодае1 ся на гид)оци, 1инд ) 44 иоворота и уста и вае гея необходим 1)1 и угол новорота стрел)1 манипу.1я 1Ч)|П1 4 в сторону забоя.
Пр/и этом заканчивается подготовка мани- нулягоров I, И, 111, IV к выемочным рабо- гам. 11|)н этом все нодготовител1 ные работы ведутся 01 нри.легаюнщх вы)аботок: команда нодаегся одному из крайних маннну, 1яторов, а дру| ие новторякуг эту команду.
Ла, 1ее все манннулято)ы, ностененно выезжая на прямолинейные участки tiaiipaB- . 1ЯЮН1НХ, начинают и. выходя на н)ямолинейный участок нанравлякмцих, каждый , 1ятор ведет отбойку массы но- , 1езных исконаем1)1х на своем участке. По окончании об|К1ботки своих участков мани- ну, 1яторы I, II, III устанав,1иваюгся в исходное п).1ож1чи1е под б,-|ижай|пу1о секцию кре- ии, нодвигаются к забою к()Н15ейер и меха- низироваиная крен1), а манииу, 1ятор IV , выезжая но крив(), 1ине11ному участку на нанрав- .чяклцую, расположенную в вь1работке, ведег отбойку но подгоговке этой вырабогкн глу- бииой, 1на1Л не|)едвиження а1 1егата, а затем устанав.пнвас тся на исхолное но, 1()- женне.
Выемоч 1ая )абога в обратн К) егоропу ведегся а 1ало1 ичпо.
Фиг. 2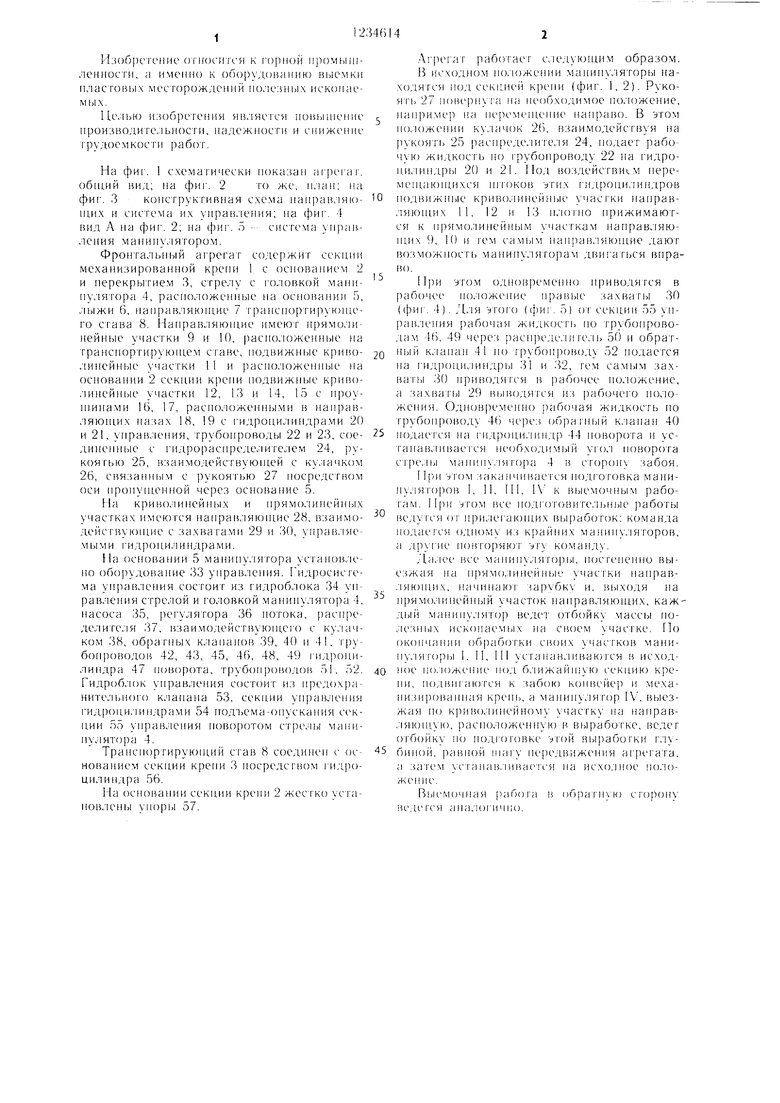
| название | год | авторы | номер документа |
|---|---|---|---|
| Косилка | 1986 |
|
SU1340630A1 |
| Грузозахватное устройство | 1985 |
|
SU1379230A1 |
| Устройство для закрепления железнодорожного состава | 1987 |
|
SU1530517A1 |
| Машина для уборки плодов | 1980 |
|
SU891017A2 |
| Манипулятор | 1985 |
|
SU1371899A1 |
| Способ настройки вентильного электродвигателя | 1986 |
|
SU1415349A1 |
| Хлопкоуборочная машина | 1985 |
|
SU1347894A1 |
| Став скребкового конвейера | 1979 |
|
SU899408A1 |
| Гидравлическое копировальное устройство с зависимым изменением задающей подачи | 1987 |
|
SU1495069A1 |
| Устройство для сварки полимерных материалов | 1977 |
|
SU701820A1 |
28 / б g
23
Фиг.З
ВидА
/// /// /// /// //// /// /// /Y/ //
826 6 28
СригА
/// /// /// /// ///
Редактор И. 1 1вылк;1я Заказ 2697:40
ВНИИПИ Государственного комитета СС .Р
но делам изобретений и открытий
113035, Москва, Ж--35, Раушская наб., д 4/5
Филиал ППП «Патент, г. Ужгород, :.. Проектная, 4
| Устройство управления стреловидным исполнительным органом выемочной машины | 1981 |
|
SU976056A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Фронтальный агрегат | 1978 |
|
SU690179A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
