Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышпенных роботах при работе с тонкостенными пластинчатыми деталями.
Целью изобретения является повышение надежности работы.
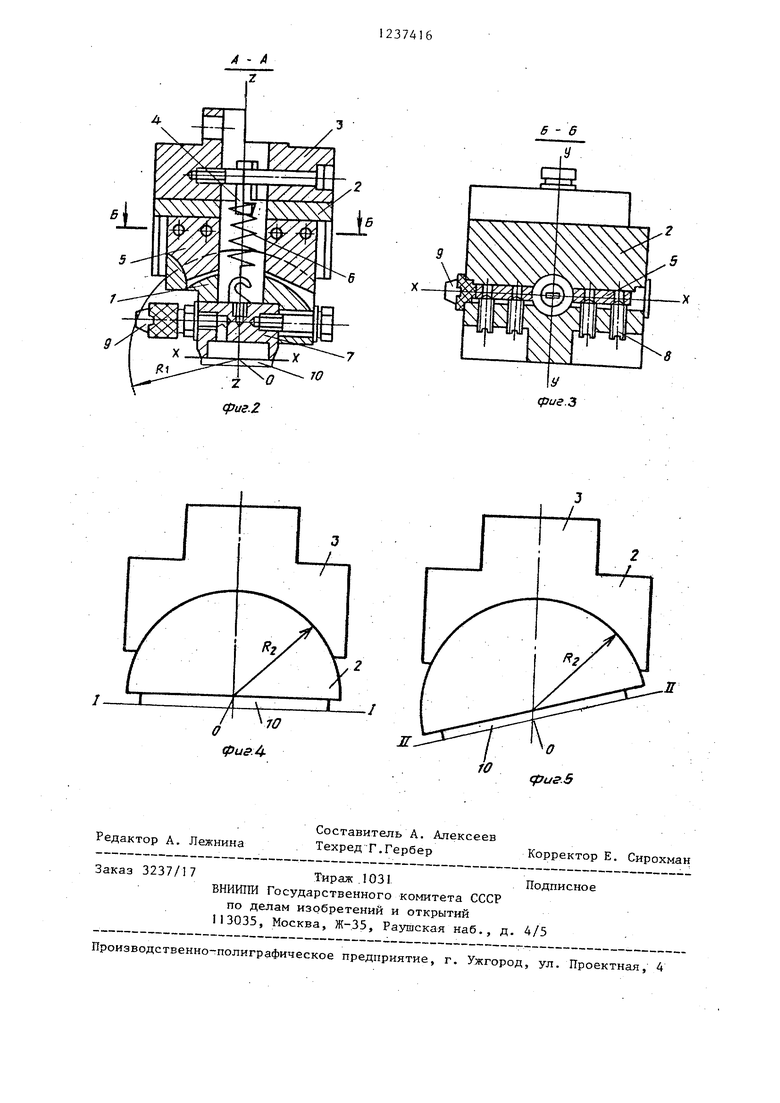
На фиг. 1 изображено захватное устройство, предназначенное для захвата и установки деталей; на фиг.2- разгез А-А на фиг. ; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. Д - схема захватного устройства в момент захвата детали с исходной плоскости Г-1; на фиг. 5 - схема захватного устройства при установке детали на плоскость ГТ-ТТ, непараллельную исходной, и повернутое шарнирное соединение в опорной цилиндрической поверхности.
. Захватное устройство содержит вкладыш 1 с цилиндрической опорной поверхностью, выполненной по радиусу R, ,i вкладьш 2 с цилиндрической опорной поверхностью, вьтолненной по радиусу Pj, корпус 3, пластины 4 и 5, входящие в пазы верхнего и нижнего вкладышей, пружину 6, кинематически связывающую вкладьшш с корпусом, вакуумную присоску 7, винты 8 крепления пластин, штуцер 9 для отсоса воздуха и захватываемую деталь 10. На фиг. 1-5 обозначен) ось Х-Х цилиндрической опорной поверности вкладьша 2; ось У-У цилиндрической опорной поверхности вкладыша 1 ; вертикальная ось .Z-Z. захватного устройства; исходная плоскость Г-1 захвата; плоскость ГТ-ГГ установки, непараллельная исходной плоскости.
Захватное устройство работает следующим образом.
Корпус 3 жестко гом манипулятора.
соединен с рыча
S
0
5
0
5
0
Захватное устройство перемещается манипулятором в зону расположения захватываемой детали и соприкасается присоской 7 с захватываемой деталью 10 по рабочей поверхности. Присоска соединена с корпусом 3 при помощи верхнего 2 и нижнего 1 вкладышей,, которые под действием пружины 6 контактируют между собой и с корпусом по двум) взаимно перпенди- куляоным цилиндрическим поверхностям радиусов R и R,, благодаря чему присоска может поворачиваться в двух взаимно перпендикулярных плоскостях относительно точки О и принимать положение, параллельное захватываемой детали. После соприкосновения присоски 7 с деталью 10 и откачивания воздуха через штуцер 9 дет,аль переносится в зону установки. Плоскость ГГ-ГГ установки детали за счет погрешностей изготовления может быть не параллельна исходной плоскости, в этом случае за счет поворота присоски в двух взаимно перпендикулярных плоскостях относительно точки О основание присоски занимает положение, параллельное плоскости установки детали.
Для фиксации положения нижнего вкладыша 1 используются пластины 5. Врехняя часть пластин при помощи винтов 8 жестко соединяется с верхним вкладышем 2, а нижняя часть пластины с минимальным зазором входит в паз фиксируемого вкладьш1а . Фиксация положения верхнего вкладьшза 2 производится при помощи пластин 4, входящих в паз В, аналогично фиксации HjDKHero вкладьшза 1 . Силовое замыкание цилиндрических опорных поверхностей вкладьш ей 1 и 2 и корпуса 3 производится пружиной 6 растяжения.
Применение предлагаемого устройства позволяет повысить надежность работы манипулятора.
3
5 - 6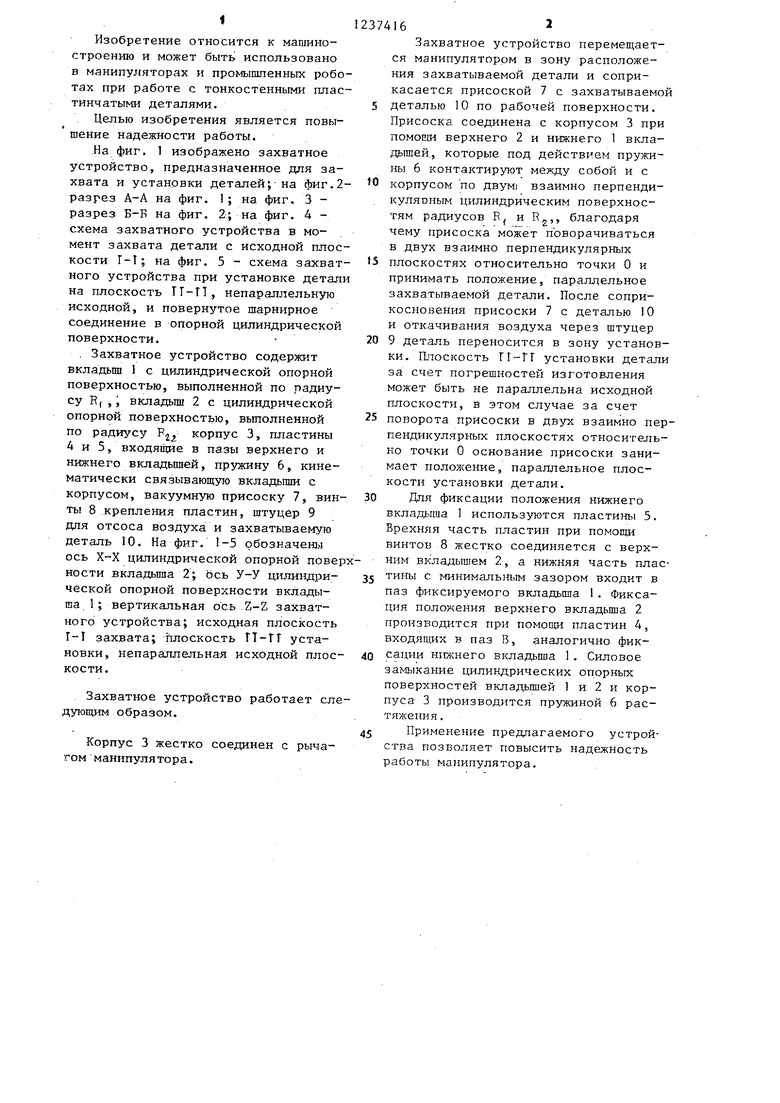
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захват | 1977 |
|
SU632634A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| Вакуумный схват | 1986 |
|
SU1491702A1 |
| Многопозиционный вакуумный захват | 1988 |
|
SU1662844A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Схват манипулятора | 1985 |
|
SU1348168A1 |
| РАБОЧИЙ ОРГАН | 2012 |
|
RU2569826C2 |

Cpuff:
Редактор A, Лежнина
Составитель A. Алексеев Техред Г,Гербер
Заказ 3237/17Тираж. 1031Подписное
ВНИИ1Ш Государственного комитета СССР
по делам изобретений и открытий I13Q35, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Е, Сирохман
| Концевой кран для воздухопровода автоматического воздушного тормоза | 1927 |
|
SU6851A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
