кой к собственной. Такое поремещенне одной из собираемых деталей позволяет улучшить условия сборки и пинысать иадежность процесса сборки ;;а счет исключения заклинивания.
Ф о р м у л а и 3 о б р е т е н и я
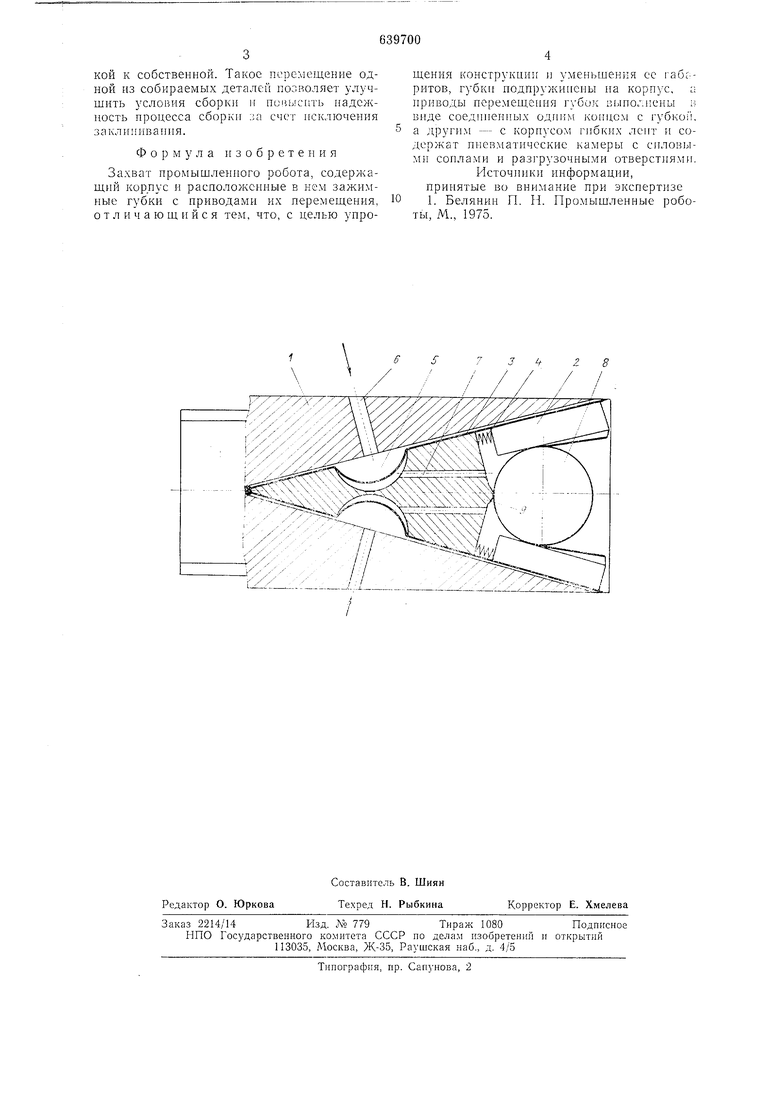
Захват промышленного робота, содержаший корпус и расположеиные в нем зажимные губки с приводами их перемеи1,еиия, отличаюшийся тем, что, с целью упрощения конструкции и уменьшения ее гао:ритов, губки подпружииеиы иа кориус, L; ириводы иеремешеиия губок 15ыио;-11еиы и виде соедииеипых одним концом с губкой, а другим - с корпусом гибких лент и содержат пнев.матические камеры с силовыми соилами и разгрузочными отверстиями.
Источники информации, принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботы, М., 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Устройство для сборки деталей | 1977 |
|
SU663525A1 |
| Схват | 1977 |
|
SU659377A1 |
| Схват промышленного робота | 1989 |
|
SU1770121A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Захват промышленного робота | 1979 |
|
SU848353A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Схват промышленного робота | 1983 |
|
SU1085810A1 |
| Схват промышленного робота | 1978 |
|
SU716810A1 |
| Схват промышленного робота | 1977 |
|
SU638462A1 |
