Изобретение относится к автоматизации сборочных работ с применением ориентированно подающих и гибочных механизмов и может быть использовано в автоматических линиях при изготовлении резистивных элементов блоков резисторов для электровозов и других типов сопротивлений.
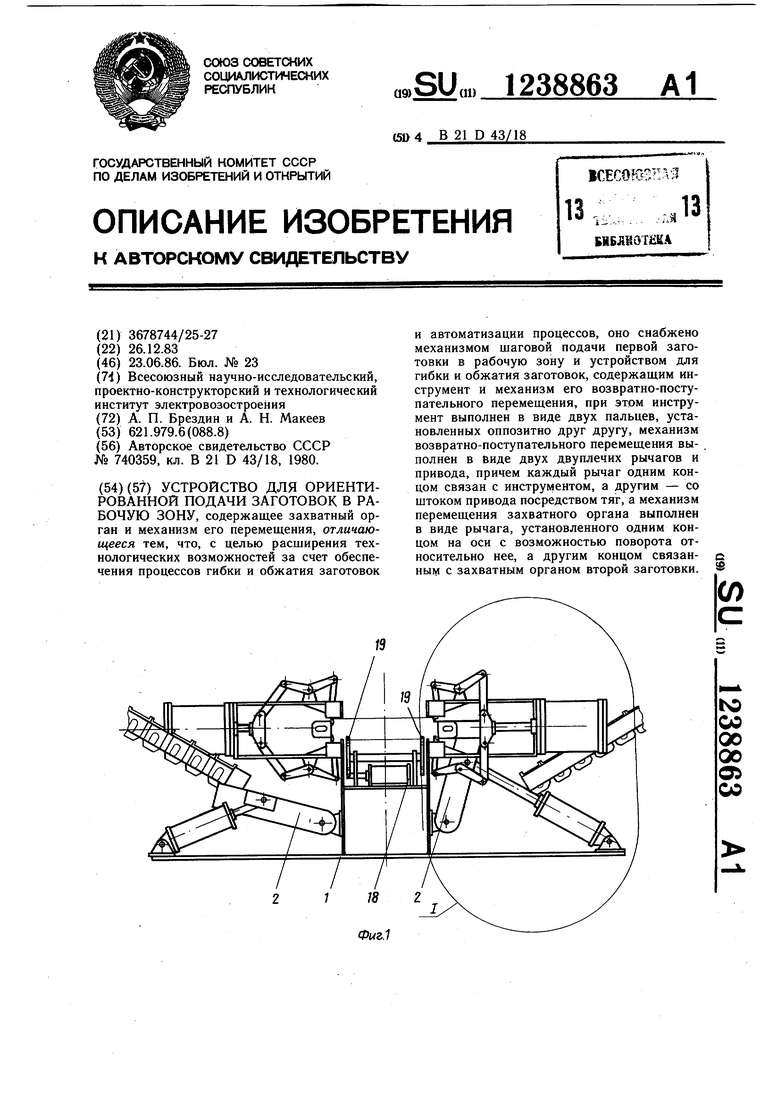
Целью изобретения является расширение технологических возможностей за счет обеспечения процессов гибки н обжатия заготовок и автоматизации прои.ессов.
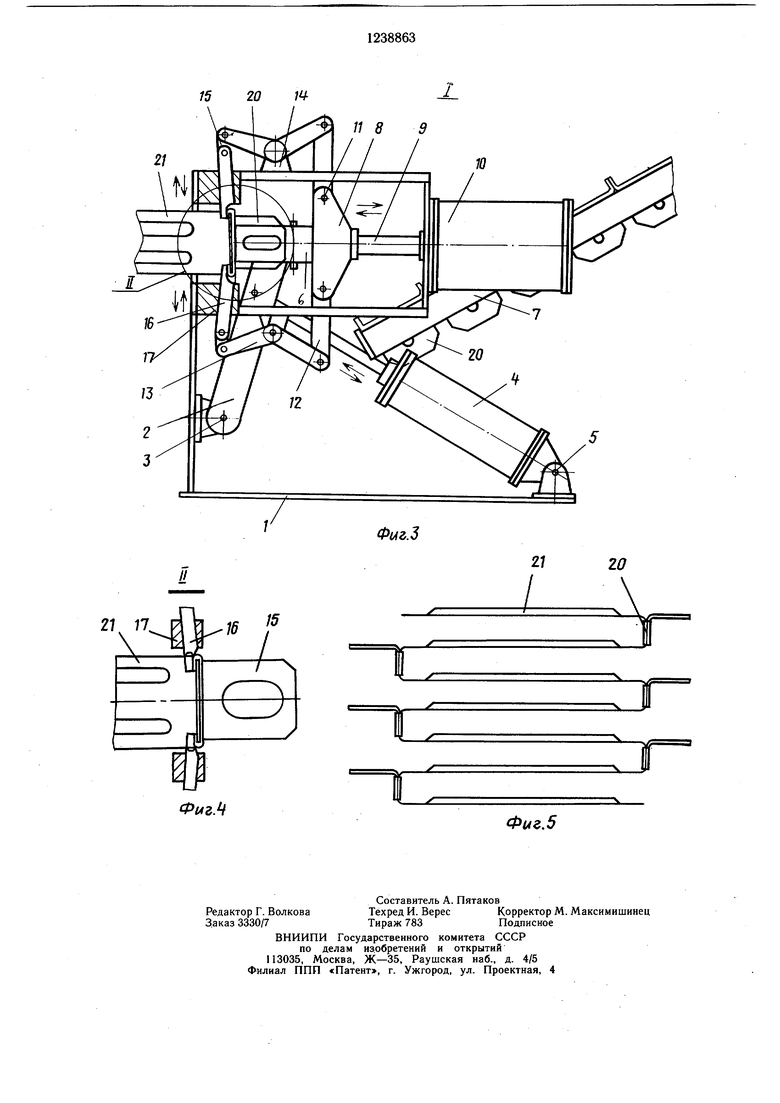
На фиг.1 показано устройство, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - узел 1 на фиг.1; на фиг.4 - узел II на фиг.З; на фиг.5 - собранное изделие.
Устройство содержит основание 1, рычаги 2, расположенные на взаимно противоположных сторонах основания 1 и имеющие возможность совершать асинхронно возвратно- поступательные поворотные перемещения на осях 3 от пневмоцилиндров 4, установленных на опорах 5 с возможностью качения, захватные устройства б, выполненные в виде профиля сложной заготовки, наклонно вы-, полненные накопительные лотки 7, загрузка которых осуществляется бункерными загрузочными устройствами (не показаны). Подвижные корпуса 8 смонтированы на штоках
9,возвратно-поступательные перемещения которых обеспечиваются от пневмоцилиндров
10.На осях 11 по обе стороны подвижного корпуса 8 установлены тяги 12, предназначенные для соединения с двумя двуплечими рычагами 13, расположенными в одной плоскости на взаимно противположных сторонах, щарнирно закрепленными на опорах 14. Компенсирующие звенья 15 соединены с инструментом, выполненным в виде пальцев 16, имеющих возможность встречно совершать возвратно-поступательные перемещения по установленным наклонно направляющим 17. Механизм 18 шаговой подачи установлен на основании 1, расположен между рычагами 2 и двуплечими рычагами 13 и предназначен для соединения с зубчатыми колесами 19. Кроме того, на фиг.1-3 показаны держатель 20 и изогнутая фехралевая лента 21. Последовательность работы всех силовых пневмоцилиндров обеспечивается
бесконтактными переключателями (не показаны) .
Устройство работает следующим образом. В исходном положении правые рычаги 2 5 и подвижной корпус 8 находятся в крайнем правом положении, а пальцы 16 относительно друг друга разведены в крайние верхнее и нижнее положения. Держатели 20 по наклонно выполненному лотку 7 под собственным весом скатываются в исходное поло- 0 жение. Включением пневмоцилиндра 4 приводится в движение рычаг 2, который своим захватным устройством 6 снимает с накопительного лотка держатель 20 и ориентированно подает в зону установки для совj мещения с изогнутой фехралевой лентой, находящейся также сориентированной относительно места подачи держателя 20 зубчатыми колесами 19. С включением в автоматическом режиме пневмоцилиндра 10 начинает движение влево подвижный корпус 8,
0 который через тяги 12 и двуплечие рычаги 13 приводит в поступательное встречное движение пальцы 16, которое сопровождается загибанием усиков держателя вокруг П-об- разных перегибов изогнутой ленты. Посредством механизма 6 захвата одновременно с процессом гибки, телом подвижного корпуса 8 осуществляется плотное прижатие держателя к П-образному перегибу ленты 21, их совмещенное упругое базирование, плотное обжатие и крепление держателя 20 к изоP гнутой ленте 21, после чего включением пневмоцилиндров 10 и 4 на обратный ход отводятся в свое исходное положение пальцы 16, подвижный корпус 8 и рычаг 2. В такой же последовательности после окончания цикла работы в правой стороне уст ройства в автоматическом режиме происходит подключение пневмоцилиндров 10 и 4 левой стороны устройства, подача держателя 20 с накопительного лотка 7 в зону крепления, упругое базирование, плотное обжатие и крепление держателя 20 к ленте 21,
0 отвод в исходное положение пальцев 16, подвижного корпуса 8 и рычага 2. В конце завершенного цикла механизмом 18 шаговой подачи через зубчатые колеса 19 производится шаговая подача на один полный виток всей изогнутой ленты. Цикл в дальнейшем повторяется.
271
2/
Ф1/1г.З
//
16
15
20
21
Iл
Составитель А. Пятаков
Редактор Г. ВолковаТехред И. ВересКорректор М. Максимишинец
Заказ 3330/7Тираж 783Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патеит, г. Ужгород, ул. Проектная, 4
Фиг.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовления спиралей | 1983 |
|
SU1080901A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Способ образования мотков проволокии уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1975 |
|
SU844092A1 |
| Устройство для сборки и сварки кронштейнов ленточных конвейеров | 1977 |
|
SU716758A1 |
| ШВЕЙНАЯ МАШИНА ПОТАЙНОГО СТЕЖКА | 1991 |
|
RU2015226C1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Установка для механического соединения наконечника с проводом | 1989 |
|
SU1663670A1 |
| Устройство для натяжения,соединения и отрезки обвязочных лент из синтетического материала | 1982 |
|
SU1134117A3 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
