fl
Изобретение относится к подающим устройствам заготовок в зону обра- ботки,преимущественно в рабочую зону пресса, а именно к устройствам для подачи заготовок типа колпаков
в зону обработки. (
Цель изобретения - повышение производительности труда, путем связи шагового поворотного накопителя, шиберного захватного органа и захватного органа для подачи заготовок в зону обработки с единым приводом.
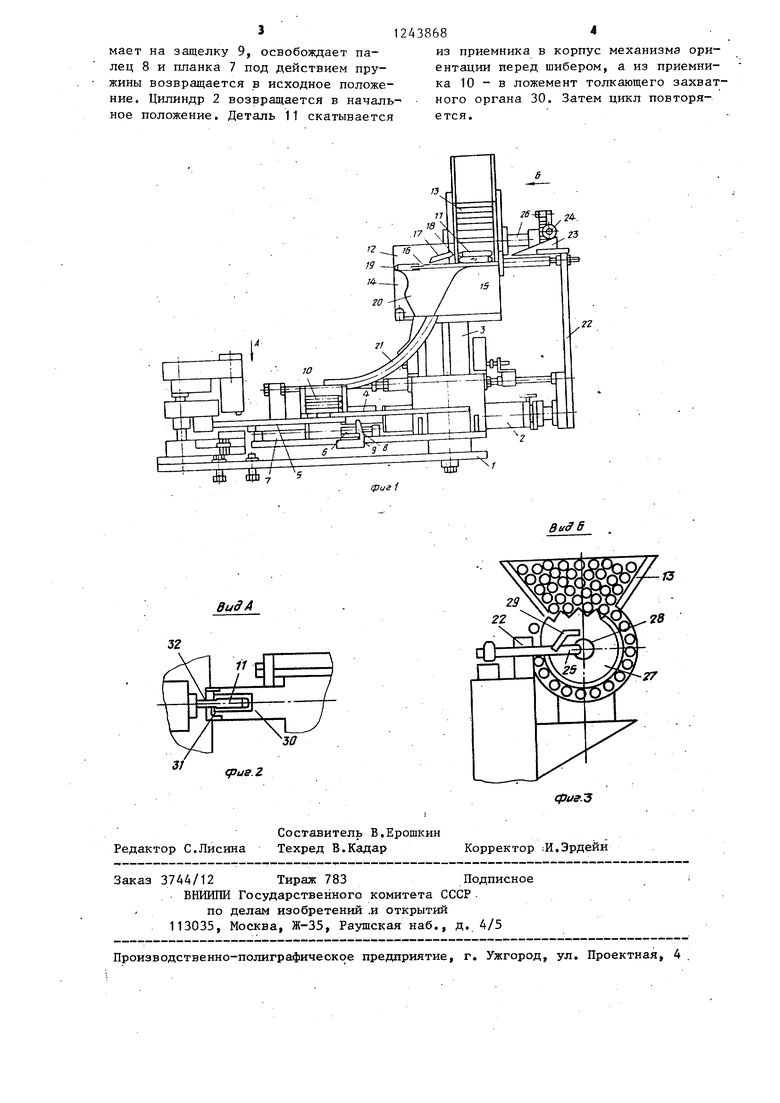
На фиг.1 схематически представлено предлагаемое устройство, общий вид на фиг.2 - вид А на фиг.11 на фиг.З - вид Б на фиг.1,
Устройство содержит станину 1, на которой установлен единый привод в виде силового цилиндра 2, стойку 3, планку 4 и механизм 5 удаления заготовок, имеющий ось 6 с Г-образ- ной опорной планкой 7. На оси 6 предусмотрен фиксирующий Псшец 8, взаимодействующий с защелкой 9. На планке 4 расположен приемник 10 для заготовок, для приема соориентирован ных деталей 11. Для ориентации деталей 11 на стойке 3 закреплен механизм 12 .ориентации с загрузочной кассетой 13. Механизм 12 ориентации выполнен в корпусе 14, в котором с возможностью перемещения установлен шиберный захватный орган 15, имеющий ступень 16. Над шибером установлен пов оротный кронштейн 17, свободно установленный на оси 1В, В корпусе 14 имеется опорная площадка 19 для неправильно ориентированных деталей и фигурный паз 20 для направления деталей по наклонному лотку 21 в приемник 10 для заготовок. Шиберный захватный орган 15 через кронштейн 22 связан с силовым цилиндром 2 и имеет клиновидйый копир 23, взаимодействующий с кулачком 24, установленным на рычаге 25, свободно посаженном на валу 26. На последнем установлен также шаговый поворотный накопитель дд1я заготовок в виде барабана 27 и храповик 28, связанньй через собачку 29 с рычагом 25 о К штоку силового цилиндра 2 с левой стороны прикреплен толкающий захватный орган 30 с П-образным ложементо для заготовок для подачи соориенти- рованных деталей в рабочую зону штампа и имеющий съемные зацепы 31.
Дет.али 11 устанавливаются на матрицу 32 штампа.
Устройство работает следующим образом.
Загруж-ают в неориентированном положении в кассету 13 заготовки в виде колпаков, которые попадают в пазы барабана 27. Включают единый привод. Силовой цилиндр 2 начинает
перемещаться влево, одновременно с ним двигается шиберный захватный орган 15, связанный с ним через кронштейн 22, Клиновидный копир 23 шиберного захватного органа 15 давит
на кулачок 24 рычага 25, который, поворачиваясь, вводит собачку 29 в зацепление с храповиком 28. Барабан 27 поворачивается и сбрасывает одну заготовку в приемник для заготовок.
Если деталь 11 находится в неориентированном положении, она нанизывается на торец шибера, который продвигает ее до опорной площадки 19. Затем, при обр-атном ходе шибера поворотный кронштейн 17 снимает деталь 11 с шиберного захватного органа 15 и она ориентированным концом под действием собственного веса по фигурному пазу 20 падает в лоток 21 и затем в приемник 10, Если деталь 11 находится в соориентированном положении, то она шиберным захватным органом 15 выталкивается в полость корпуса 14 механизма 12 ориентации и под собственным весом по фигурному пазу 20 попадает в наклонный лоток 21 и затем в приемник 10 для заготовок. Одновременно с ходом шиберного захватного органа 15, обеспечивающего подачу
деталей из кассеты 13 в механизм 12 ориентации и из него в приемник 10, силовой цилиндр 2 передвигает влево закрепленный на нем толкающий захват- ньй орган 30, в ложемент которого
из приемника 10 падает ориентированная деталь 11 отверстием вперед. Двигаясь дальше, толкающий захватный орган 30 устанавливает деталь.11 на матрицу 32 штампа. При этом толкающий
захватный орган 30 находится в рабочей зоне штампа.
При ходе штампа на пробивку его упор нажимает на Г-образную планку 7, происходит ее поворот и фиксация в открытом положении при обратном хЪде цилиндра 2, готовая деталь ска- тьшается в приемный лоток. При дальнейшем ходе захватный орган 30 нажи еГа освобовдает пажиньЛ ° действием пру- нГ --«-е положа1243868
ние. ЦИЛИНДР 2 Bosap i eTcH в™::: °
нов положение. Деталь, 1 скатывае Г е ся/
из приемника в корпус механизма ориентации иеред шибером, а из приемника 10 - в ложемент толкающего захват
1243868
°
е ся/
из приемника в корпус механизма ориентации иеред шибером, а из приемника 10 - в ложемент толкающего захват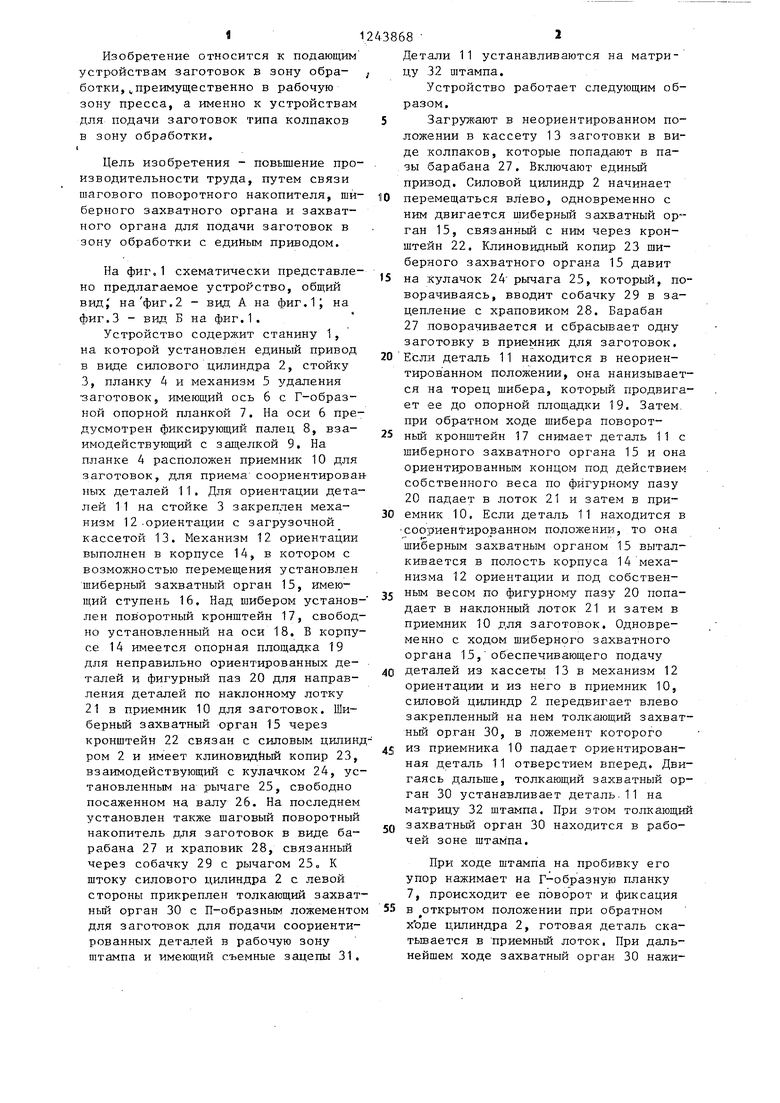
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1442300A1 |
| Устройство для подачи заготовок в рабочую зону обрабатывающей машины и их удаления | 1984 |
|
SU1163956A1 |
| Устройство для подачи заготовок в рабочую зону пресса и удаления отходов | 1986 |
|
SU1402393A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1980 |
|
SU912353A1 |
| Штамп с отключаемыми пуансонами | 1987 |
|
SU1609536A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1987 |
|
SU1416242A1 |
| Устройство для отделения от стопы нижней заготовки и подачи ее в зону обработки | 1983 |
|
SU1140863A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| УСТРОЙСТВО ПОДАЧИ ДЕТАЛЕЙ | 2013 |
|
RU2533980C1 |
W г
ВидА
30
fpu8.2
Репятстпг, г пСоставитель В.Ерошкин
едактор С.Лисина Техред В.Калаоv . Корректор :И.Эрдейи
Заказ 3744/12 Тираж
ВНИИПИ Государственного комитета СССР° ° S Р « открытий . Раушская наб., д. 4/5
производственно-полиграф;;е к1г;; ; ; :7т;;;;
| Устройство для автоматической загрузки и выгрузки пресса | 1977 |
|
SU663466A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Ориентирующее устройство | 1979 |
|
SU848265A2 |
| Атрошенко А.П | |||
| Механизация и автоматизация горячей штампозки, М-Л.: Машиностроение, 1965, с | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
