Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в подъемно-транспортных машинах дл я предохранения от перегрузки механизма подъема и металлоконструкции, например, подъемного крана в процессе его эксплуатации.
Цель изобретения - расширение функциональных возможностей.
На фиг. 1 изображен ограничитель, обишй вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3.- разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1.
Ограничитель грузоподъемности состоит из корпуса 1, в котором в подшипниках 2 установлен эксцентриковый вал, на котором на подшипниках 4 и 5 закреплен блок 6 и рычаг 7, связанный с эксцентриковым валом, внутри которого размеш,ен торсион 8, закрепленный шлицевыми концами в эксцентриковом валу 3 и фланце 9. Последний связан с рычагом 7 переходником 10 и шпильками 11. На шлицевом конце эксцентрикового вала 3 закреплены рычаги 12 и 13. В отверстии рычага 12 закреплен эксцентриковый упор 14.
Через блок 6 перекинут канат 15. Рычаг 7 посредством рычага 16 связан с рычагом 17 рычажной системы. Носледний связан с одним концом дополнительного торсио- на 18 посредством втулки 19 дополнительного торсиона 18, закрепленного на фланце 9, жестко связанном с корпусом 1. Рычаг 17 установлен в корпусе 1. На шлицах рычага 17 посажен сектор 20. На рычаге 13 и секторе 20 расположены кулачки 21-25, вза- имодействуюшие с упорами конечных выключателей Вк1, Вк2, ВкЗ, Вк4 и Вк5, размещенных на корпусе 1. Первоначальная закрутка по часовой стрелке торсиона 18 осуществляется с помощью винтового упора 26, упираюнхегося в рычаг 17.
Устройство работает следующим образом.
При подъеме или опускании груза в канате 15 механизма подъема возникает нагрузка, в результате чего эксцентриковый вал 3 под воздействием результирующей силы, создающей крутящий момент относительно торсиона 8, начинает поворачиваться вместе с блоком 6, одновременно закручивая торсион 8.
Усилие закрутки от торсиона 8 передает через фланец 9, переходник 10 и шпильки 11 на рычаг 7, а затем через рычаги 16 и 17 - на дополнительный торсион 18. При настройке ограничителя дополнительный торсион 18 закручивают по часовой стрелке на ранее заданный угол посредст
0
5
0
5
0
5
0
вом винтового упора 26, упирающегося в рычаг 17 рычажной системы. При этом на дополнительном торсионе 18 создается крутящий момент, препятствующий повороту рычага 17 по часовой стрелке от усилия, передаваемого на него от торсиона 8 через рычаг 7.
Закрепленные на эксцентриковом валу 3 рычаги 12 и 13 поворачиваются вместе с ним относительно неподвижной системы: первый фланец - переходник 10 - шпильки 11 - рычаг 7 - рычаг 16 - конечный рычаг 17 - дополнительный торсион 18. При этом кулачки 21 и 22 нажимают на рычаги конечных выключателей Вк1 или Вк2, отключая механизм подъема.
При увеличении нагрузки в канате 15 эксцентриковый вал 3 продолжает закручивать торсион 8 до тех пор, пока поворачивающийся вместе с эксцентриковым валом рычаг 12 не упрется эксцентриковым упором 14 в рычаг 7 (положение Г, фиг. 1). Когда крутящий момент, передаваемый на рычаг 7 рычагом 12, превышает противодействующий крутящий момент, созданный предварительной закруткой дополнительного торсиона 18, рычаг 7 вместе с эксцентриковым валом 3, 1ппильками 11, переходником 10 фланцем 9 и торсионом 8 начинает поворачиваться вокруг оси торсиона 8, поворачивая через рычаг 16 рычаг 17 рычажной системы по часовой стрелке и закручивая дополнительный торсион 18. Соединенный с конечным рычагом 17 сектор 20 также поворачивается, нажимая кулачками 23-25 на рычаги конечных выключателей ВкЗ, Вк4 или Вк5 и отключая их.
При снятии нагрузки с канала 15 оба торсиона 8 и 18 возвращают всю систему в исходное положение.
Предлагаемый ограничитель отключает механизм подъема при пяти фиксированных значениях нагрузки в канатах, что соответствует пяти грузам разного веса, с которыми работает кран.
Количество фиксированных значений может быть любым в зависимости от номенклатуры поднимаемых грузов.
Предлагаемая конструкция позволит исключить повреждение груза, уменьшить габариты ограничителя за счет применения одного блока и компактной рычажной системы и расширить диапазон воспринимаемых нагрузок в 5 раз благодаря последовательной работе торсионов и подбору длин рычагов, трансформирующих нагрузку, передаваемую к правому торсиону через эксцентриковый вал.
ВмдА
ib-/
Фмг.2
фи.3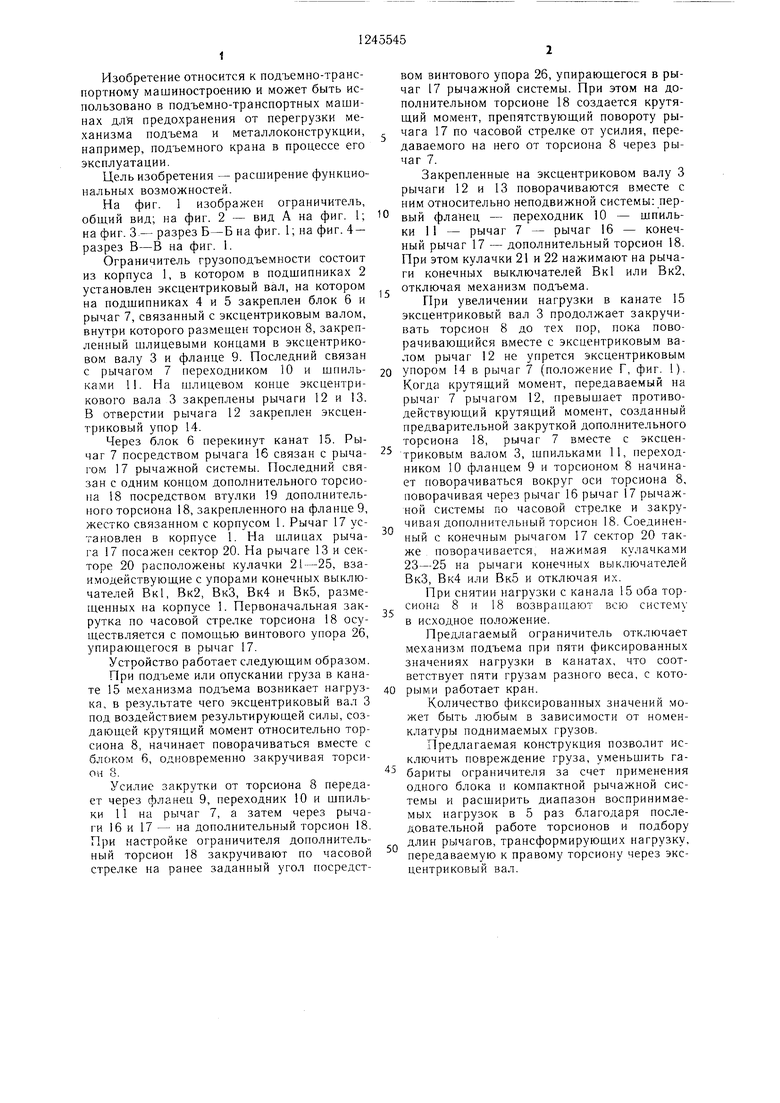
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пакетирования и обвязки предметов | 1982 |
|
SU1079548A1 |
| Станок для обрезки выпрессовок на покрышках пневматических шин | 1972 |
|
SU479652A1 |
| Полуприцеп | 1983 |
|
SU1081055A1 |
| Устройство для выбивки литейных форм | 1989 |
|
SU1675044A1 |
| Способ изотермической штамповки и система управления рабочим ходом гидравлического пресса для его осуществления | 1990 |
|
SU1741961A1 |
| Установка для транспортирования штучных грузов | 1989 |
|
SU1745651A1 |
| Устройство для управления цикломпОдАчи HA CTAHKAX для глубОКОгОСВЕРлЕНия | 1979 |
|
SU831505A1 |
| Устройство для наружного хонингования пакетов поршневых колец | 1980 |
|
SU1024242A1 |
| Установка для соединения полос | 1986 |
|
SU1433571A1 |
| Устройство для гибки вентилей камер пневматических шин | 1985 |
|
SU1378983A1 |


Фмг.
| Ограничитель грузоподъемности | 1976 |
|
SU592720A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
