Изобретение относится к машиностроению, в частности к гибким сборочным комплексам с применением роботов.
Цель изобретения - повышение экономичности и надежности комплекса за счет упрощения его структуры и системы управления.
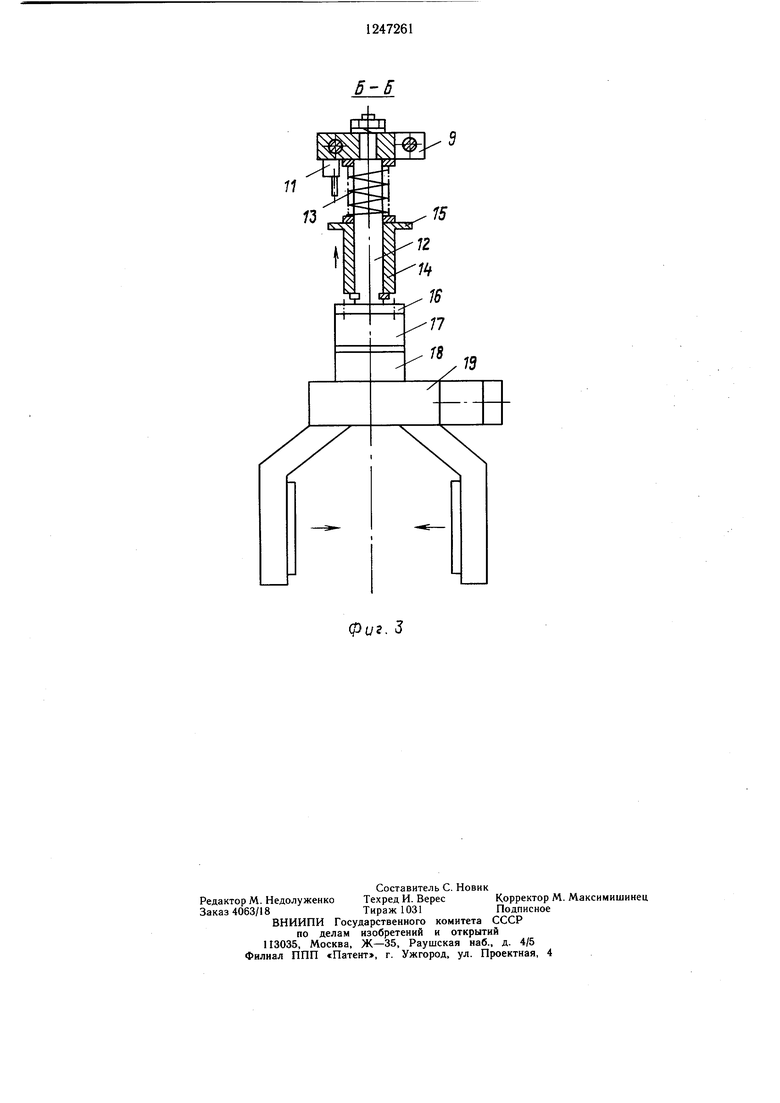
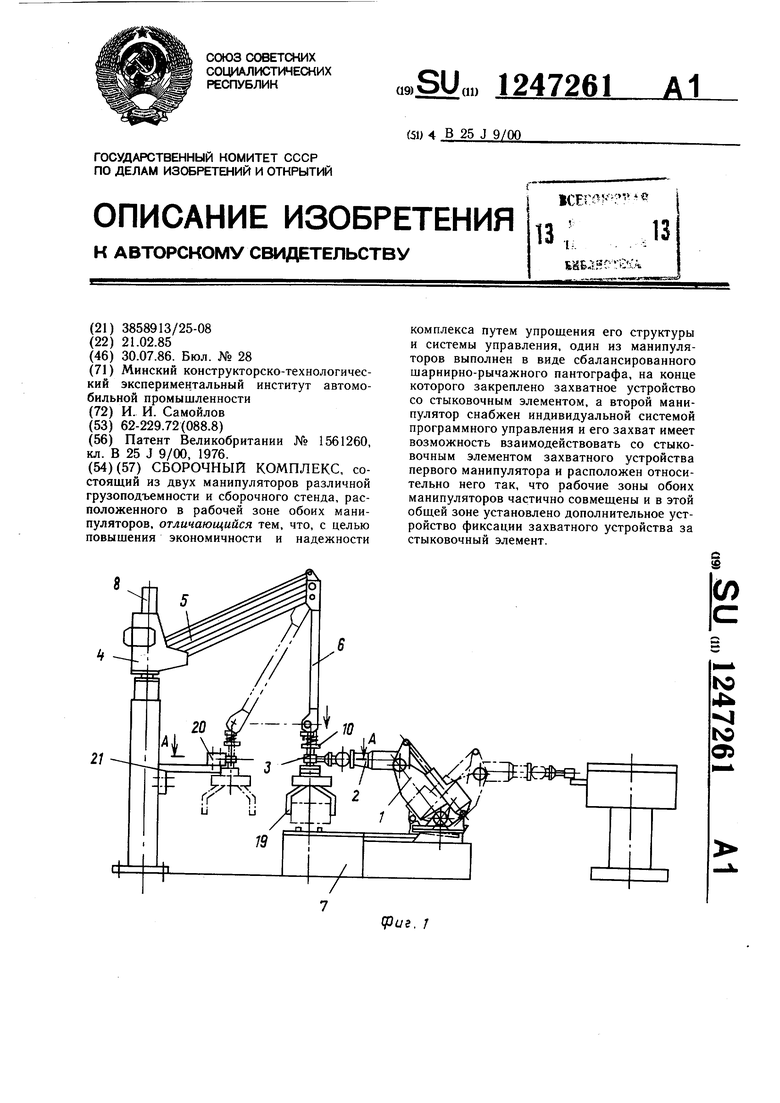
На фиг.1 показан сборочный комлпекс, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2.
Сборочный комплекс состоит из манипулятора с программным управлением 1, на руке 2 которого установлен захват 3, сбалансированного шарнирно-рычажного манипулятора 4, установленного с возможностью поворота на опоре в виде колонны и имею- щего пантограф 5, удлиненная сторона которого образует стрелу 6, и сборочного стенда 7. Грузоподъемность манипулятора 4 больше, чем грузоподъемность манипулятора 1, но манипулятор 4 проще по конструкции и не имеет собственной системы программного управления. Пантограф 5 манипулятора 4 кинематически связан с пневмоцилиндром 8. На стреле 6 установлена планка 9, на нижней плоскости которой помещен стыковочный элемент 10 и блокировочный датчик 11.
Стыковочный элемент 10 состоит из оси 12, на которую установлены пружина 13 и втулка 14, снабженная в верхней части выступом 15. Блокировочный датчик 11 установлен с возможностью взаимодействия с выступом 15. На нижнем фланце 16 оси 12 закреплен датчик 17 массы, который через фиксатор 18 связан с захватным устройством 19.
В зоне взаимодействия манипуляторов 1 и 4 установлено устройство 20 фиксации исходного положения захватного устройства 19, помещенное на колонне манипулятора 4 и выполненное в виде кронштейна 21, на котором закреплен захват 22, управляемый от системы управления комплексом.
Сборочный комплекс работает следующим образом.
К манипулятору 1 подается базовая деталь (корпус, вал и т. п.). Стрела 6 манипулятора 4 и его захватное устройство 19 находятся в зафиксированном с помощью
0
0
j
g
5
0
. устройства 20 исходном, положении, при этом захват 22 удерживает их за стыковочный элемент 10. Так как грузоподъемность манипулятора 1 меньще массы базовой детали, то для увеличения его грузоподъемности рука 2 манипулятора 1 перемещается к устройству 20 и с помощью захвата 3 соединяется со стыковочным элементом 10 захватного устройства 19 манипулятора 4. При этом система управления сборочным комплексом дает команду на освобождение захватом 22 стыковочного элемента 10.
Таким образом, манипуляторы 1 и 4 состыкованы и образуют единую систему. Далее захватное устройство 19 манипулятора 4 получает сигнал на зажим детали, после чего производится ее подъем для установки на сборочный стенд 7. Датчик массы 17 дает сигнал и пневмоцилиндр 8 развивает усилие, достаточное для уравновешивания массы базовой детали 4, а манипулятор 1 осуществляет ее перемещение на стенд.
После этого захватное устройство 19 разжимается и стрела 6 отводится в исходное положение к устройству фиксации 20.
Далее манипулятор 1 на ускоренных режимах производит установку на базовую деталь более мелких и легких деталей, составляющих основную массу узла, сохраняя при этом максимальные скорости перемещения и требуемую точность позиционирования.
Предохранения стыковочного элемента 19 от перегрузок осуществляется блокировочным датчиком 11. В случае аварийного падения давления в пневмосистеме манипулятора 4 в момент состыковки его с манипулятором 1 стрела 6 пантографа 7 начинает опускаться. Захват 3 удерживает стрелу 6 за втулку 14 стыковочного элемента 10. Вал 12 вместе с захватным устройством 19, сжимая пружину 13, начинает перемещаться относительно втулки 14 и выступом 15 замыкает блокировочный датчик 11, установленный на планке 9.
Сигнал от датчика 11 поступает в систему управления манипулятором 1, которая дает команду на разжим захвата 3 и отвод руки 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1328036A1 |
| ПЕРЕДВИЖНАЯ РЕМОНТНАЯ МАСТЕРСКАЯ | 2001 |
|
RU2210512C2 |
| Испытательный комплекс | 1984 |
|
SU1224731A1 |
| "Плавучая грузоподъемная станция | 1978 |
|
SU765106A2 |
| Роботизированный технологический комплекс | 1986 |
|
SU1530432A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Мобильный монтажный комплекс для сборно-разборных трубопроводов с раструбными соединениями труб | 2024 |
|
RU2841447C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2057635C1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
А- А
72/4
фиг.2
5-Б
| Патент Великобритании № 1561260, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
