Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, и может быть использовано для автоматизации погрузочно-разгрузочных и сборочных операций.
Цель изобретения - повышение надежности работы путем обеспечения надежной фиксации плавающей платформы.
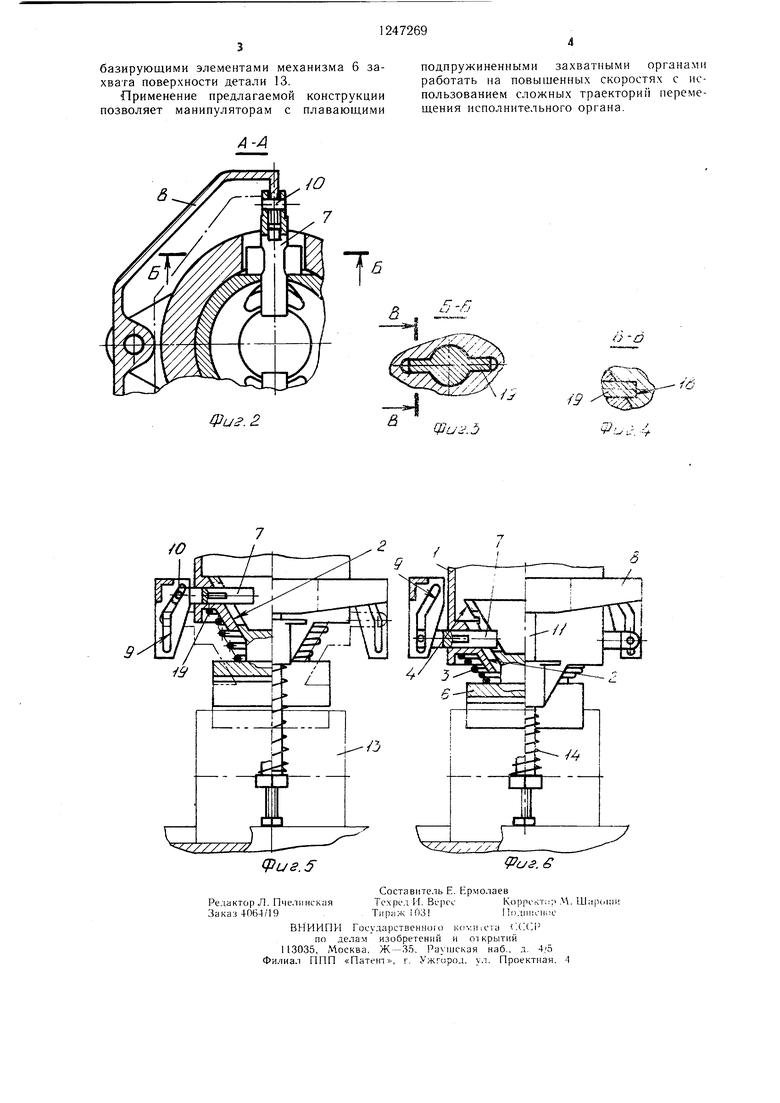
На фиг. 1 показано захватное устройство в исходном положении; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 3; на фиг. 5 - захватное устройство в исходном положении, вид слева; на фиг. 6 - то же, в момент захвата детали.
Захватное устройство содержит корпус 1, к центрируюш,ей поверхности 2 которого посредством пружины 3 прижата центрирующей поверхностью 4 размещенная в нем плавающая платформа 5 механизма ориента- ции, жестко связанная с механизмом 6 захвата, представляющим собой, например, электромагнит. В отверстиях, расположенных по периметру корпуса 1, установлены фиксирующие стержни 7 с возможностью радиального перемещения относительно оси захватного устройства под действием тягового элемента 8, имеющего копирные пазы 9 для взаимодействия с пальцами 10, смонтированными на периферийных концах фиксирующих стержней 7. Тяговый элемент жестко связан с толкателем 11, установленным в отверстии корпуса 1 с возможностью перемещения параллельно оси захватного устройства. Толкатель 11 выдвинут навстречу опорной поверхности 12 с деталью 13 посредством цилиндрической пружины 14 сжатия, размещенной на нем и упирающейся од- ним концом в корпус 1, а другим - в контргайку 15 опорного элемента 16, ввинченного в торцовое отверстие толкателя, обращенное к данной опорной поверхности. Центрирующая поверхность 4 плавающей платформы 5 имеет фигурные расширенные к низу окна 17, в которые внедряются обращенные к оси захватного устройства фиксирующие стержни 7, и пазы 18, в которые входят фиксирующие планки 19, расположенные в средней части фиксирующих стержней.
Захватное устройство работает следующим образом.
При подходе к детали 13 толкатель 11 с тяговым элементом 8, двигаясь вместе с захватным элементом, опорным элементом 16 вступает в контакт с опорной поверхностью 12 и прекращает дальнейщее перемещение. Корпус 1 с остальными составными частями захватного устройства, сжимая пружину 14, продолжает движение к детали, чем вызывает раздвижение фиксирующих стержней 7, обусловленное перемещение пальцев 10 по наклонным участкам
пазов 9. При этом фиксирующие планки 19 выходят из зацепления с пазами 18 и утапливаются в отверстиях корпуса 1, рас- стопоривая плавающую платформу 5, причем фиксирующие стержни 7 остаются в сопряжении с верхними суженными частями фигурных окон 17.
В момент касания поверхности детали штрихпунктирные с двумя tO4KaMH линиями на фиг. 1 и 5) механизм 6 захвата вместе с плавающей платформой 5 прекращает даль нейщее движение. В завершающей фазе корпус 1 с фиксаторами, сжимая пружину 3, вместе с рукой манипулятора совершает дополнительный ход на деталь 13. При этом центрирующая поверхность 4 плавающей платформы 5 выходит из сопряжения с центрирующей поверхностью 2 корпуса 1, механизм ориентации переходит в плавающее положение и базирующими поверхностями механизма 6 захвата самоустанавливается по поверхности детали 13. Пальцы 10 перемещаются по прямолинейным участкам пазов 9, удерживая фиксирующие планки 19 фиксирующих стержней 7 утопленными в отверстиях корпуса 1. Фиксирующие стержни 7 вместе с корпусом I перемещаются относительно плавающей платформы 5 и оказываются в нижних расширенных частях фигурных окон 17, давая возможность для поворота механизма ориентации при его самоустановке по детали 13. После этого производится зажим детали и отвод схвата с деталью от опорной поверхности 12. При это.м работа механизмов происходит в обратной последовательности. Пружина 3, разжимаясь, возвращает механизм ориентации в исходное положение в корпусе 1. Конфигурация боковых стенок окон 17 с плавными наклонными переходами от широких частей к узким способствует возвращению фиксирующих стержней 7 в узкие части окон, фиксируя платформу 5 от проворота вокруг оси схвата, причем пазы 18 устанавливаются против фиксирующих планок 19. При отходе схвата от поверхности 12 толкатель 11 с тяговым элементом 8, возвращаясь в исходное положение под действием пружины 14, сводит фиксирующие стержни 7, причем планки 19 заходят в пазы 18. Таким образом, при последующей транспортировке к позиции разгрузки механизм ориентации с деталью 13 жестко зафиксирован и сцентрирован относительно корпуса схвата I. Взаимодействие механизмов захватного устройства при выгрузке деталей на разгрузочной позиции аналогично их работе при зажиме детали. Регулировкой положения опорного элемента 16 устанавливается необходимая для разведения фиксирующих стержней 7 величина хода схвата от момента начала контакта опорного элемента толкателя 11 с опорной поверхностью 12 до момента касания
базирующими элементами механизма 6 захвата поверхности детали 13.
Применение предлагаемой конструкции позволяет манипуляторам с плавающими
подпружиненными захватными органами работать на повышенных скоростях с использованием сложных траектории перемещения исполнительного органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват | 1985 |
|
SU1311926A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Загрузочное устройство | 1985 |
|
SU1315227A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Устройство для сборки деталей | 1987 |
|
SU1535691A1 |
| Манипулятор | 1986 |
|
SU1371900A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Устройство для хранения изделий | 1988 |
|
SU1567460A1 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |

д
Ю
9и г. 2
(} -о
.З
и.4
/О
9Л
fpus.
Составитель Е. Ермолаев
Ре.чактор Л. ПчелиискаяТсхрсм . Bi pc cКоррскт;;; . Шароши
Заказ 406-4/19Тираж 1031no.uiiicii :e
ВНИИПИ Госу;1арственного ко-.-льста ГЛХл
по делам изобретений и открытий
113035, A locKBa, Ж --35. Раушская наб.. л. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная. 4
u.S
| Автоматическое устройство для установки вала в отверстие | 1983 |
|
SU1090521A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
