i
(Л
со
СО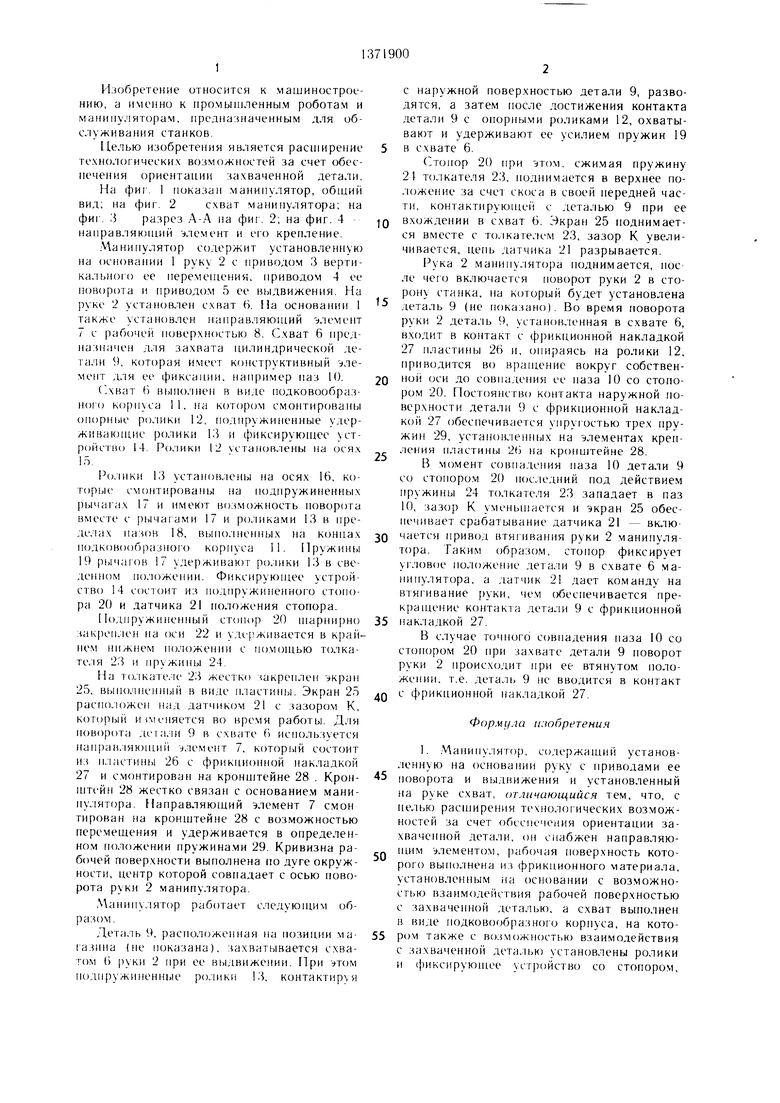
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1202861A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Устройство для сборки деталей | 1987 |
|
SU1535691A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |
| Загрузочное устройство | 1988 |
|
SU1664508A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
Изобретение относится к ма1иинострое- нию, а именно к промышленным роботам и манину-тяторам, предназначенным для об служивания станков. Пелью изобретения является расширение те.хнологически.х BO.-I- м(JЖHocтeй за счет обеспечении ориентации за.хваченной детали. Во время поворота руки 2 манипулятора деталь, расположенная в с.хвате 6, контактирует с фрикционной па- к.1адкой 27, что обеспечивает ее вращение вокруг своей оси до совпадения паза, по.чненного в детали, со стоп(.)ром фиксирую- ntero устройства, установленного па с.хвате 6. Стопор западает в паз детали, деталь фиксируется в с.хвате. а датчик положепия стопора дает команду на отвод )укп 2 ма- пппулятора от фрикциоппой пакладки 27. Далее ориентированная деталь подается на станок для обработки. 2 з.н. ф-лы, 4 ил.
Фиг.7
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для обслуживания станков.
Целью изобретения является расашрение технологических возможностей за счет обеспечения ориентации захваченной детали.
На фиг. 1 показан манипулятор, обший вид; на фиг. 2 схват манипулятора; на фиг. 3 разрез А-А на фиг. 2; на фиг. 4 - направляющий : лемент и его крепление.
Манипулятор содержит установленную на основании 1 руку 2 с приводом 3 верти- кальн()|() ее перемещения, приводом 4 ее поворота и приводом 5 ее выдвижения. На руке 2 установлен схват 6. На основании 1 также усгановлен направляюп1ИЙ элемепт 7 с рабочей поверхностью 8. С.хват 6 предназначен для захвата цилиндрической детали 9, которая имеет конструктивный :(ле- мент для ее фиксации, например паз 10.
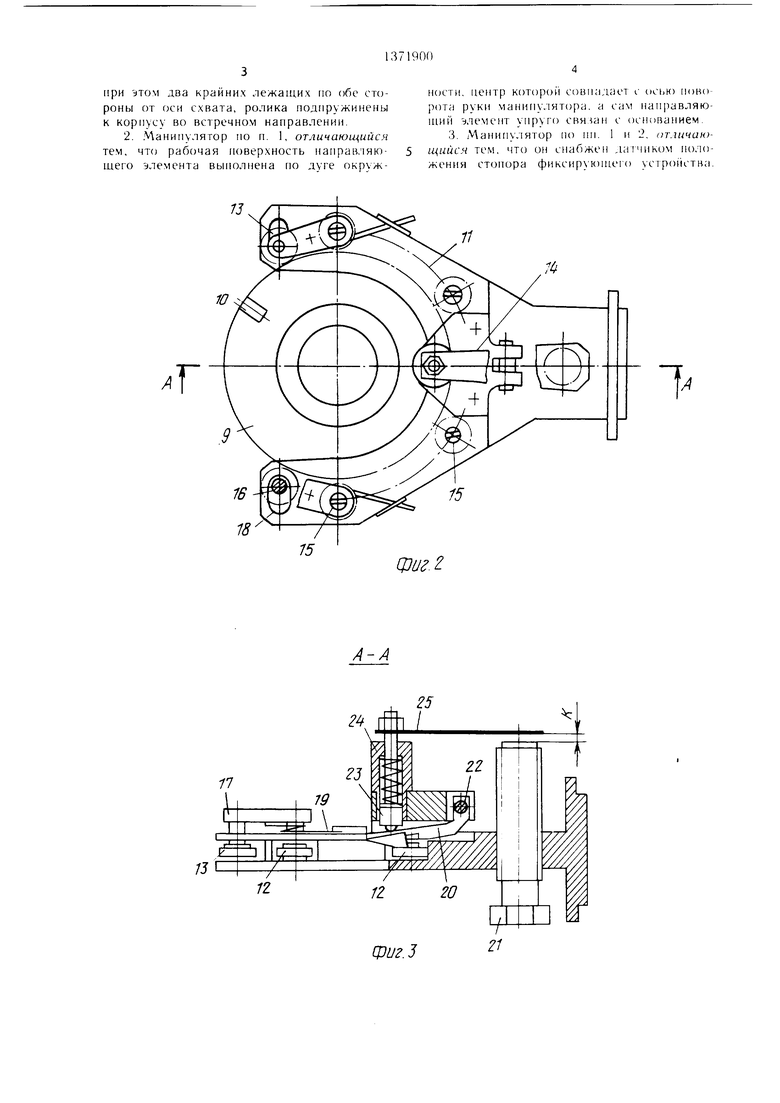
( хват () вьпюлнеп в виде подковообразною корпуса 11. на котором смонтированы опорные ролики 12, подпружиненные удерживающие ролики 13 и фиксирующее устройство 14. Ролики 12 установлены на ося.ч 15.
Ро.1ики 13 установ.аены на осях 16. которые смонтированы на подпружиненных рычагах 17 и имеют возможность новорота вместе с ) 17 и роликами 13 в пре- де. 1ах пазов 18, выпо.тненных на конпах подковообразного корпуса II. Пружины 19 рычагов 17 удерживают ро;шки 13 в сведенном положении. Фиксирующее устройство 14 cocioHT из подпружиненного стопора 20 и датчика 21 положения стопора.
Подпружиненный стопор 20 шарни)Н() зак|)еплен на оси 22 и удс- живается в крайнем нижнем положепии с по.1ошью толкателя 23 и пружины 24.
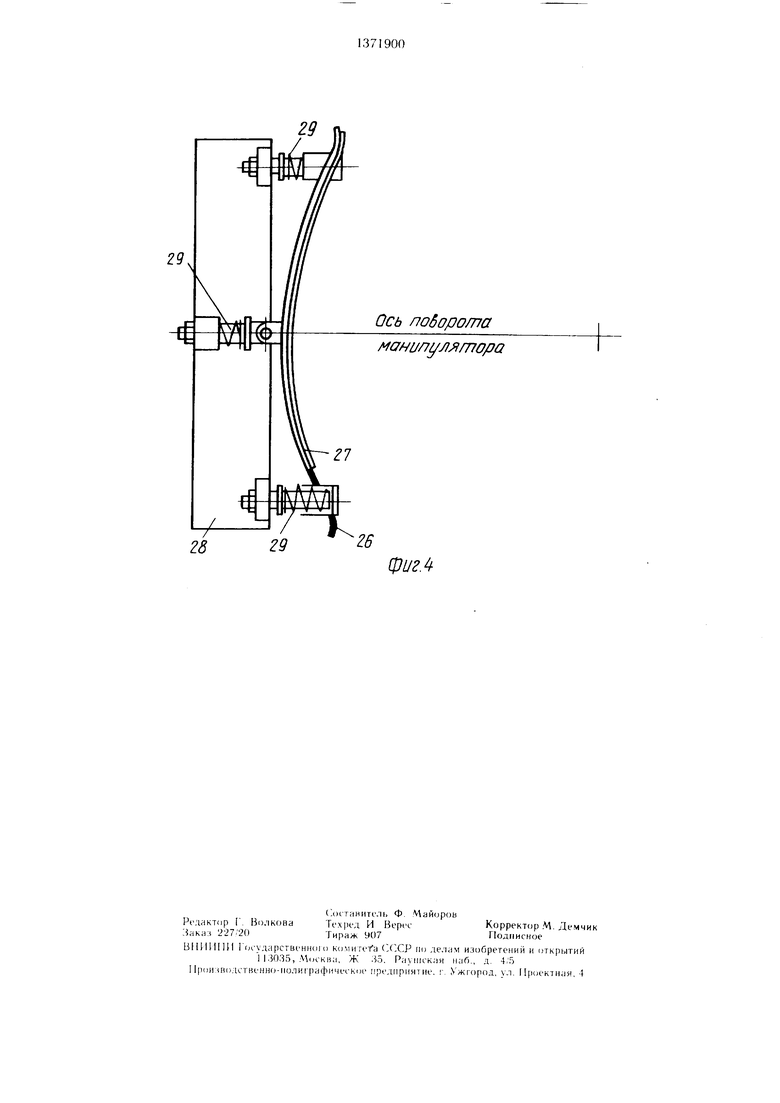
На 1 (Х1кате. 1е 23 жестко чакреплен экран 25, выполпенный в виде пластины. Экран 25 распо-пожен над датчиком 21 с зазоро.м К, когорый и eняeтcя во время работы. Для поворота де1а, 1и 9 в схвате 6 используется на11)ав;1як)пи1Й элемент 7, K() состоит из пластины 26 с фрикционной накладкой 27 и смонтирован на кронштейне 28 . Крон- 28 жестко связан с основание.м манипулятора. Направляюшнй элемент 7 смон тирован на кронштейне 28 с возможностью перемешения и удерживается в определенном положении пружинами 29. Кривизна рабочей поверхности выполнена по дуге окружности, центр которой совпадает с осью поворота руки 2 манипулятора.
Манипулятор работает следуюпцш образом.
Деталь 9, расположенная на позиции ма- азина (не показана), захватывается схва- том () )уки 2 при ее выдвижении. При этом подпружиненные ролики 13, контактируя
5
с наружной поверхностью детали 9, разводятся, а затем после достижения контакта детали 9 с опорпы.ми роликами 12, охватывают и удерживают ее усилием пружин 19
в схвате 6.
Стопор 20 при этом, сжи.мая пружину 21 толкателя 23, поднимается в верхнее положение за счет скоса в своей передней части, контактирующей с деталью 9 при ее
вхождении в схват 6. Экран 25 поднимается вместе с толкателем 23, зазор К увеличивается, це1Ц датчика 21 разрывается.
Рука 2 манипулятора поднимается, нос- ле чего включается поворот руки 2 в сторону станка, на который будет установлена
деталь 9 (не показано). Во время поворота руки 2 деталь 9, установленная в схвате 6, входит в контакт с фрикционной накладкой 27 пластины 26 и, опираясь на ролики 12, приводится во вращение вокруг собствен0 ной оси до совпадения ее иаза 10 со стопором 20. Постоянство контакта наружной поверхности детали 9 с фрикционной накладкой 27 обеспечивается упругостью трех пружин 29, установленных на элементах крепления 1ластины 26 на кронштейне 28.
В момент совпадения паза 10 детали 9 со стогюро.м 20 иос.тедний под действием пружины 24 толкателя 23 западает в паз 10, зазор К уменьшается и экран 25 обеспечивает срабатывание датчика 21 - вклю0 чается привод втя1 ивания руки 2 манипулятора. Таким образом, стопор фиксирует угловое положение детали 9 в схвате 6 манипулятора, а датчик 21 дает команду на втягивание руки, чем обеспечивается пре- крашепие контакта детали 9 с фрикционной
5 накладкой 27.
В случае точного совпадения наза 10 со стонором 20 при захвате детали 9 поворот руки 2 происходит при ее втянутом положении, т.е. деталь 9 не вводится в контакт
0 фрикционной накладкой 27.
Формула п:юпретения
5 поворота и выдвижения и установленный на руке схват, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения ориентации захваченной детали, он снабжен нацравляю- цшм элементом, рабочая поверхность которого выполнена из фрикционного материала, установленным на ()снова}1ии с возможностью взаимодействия рабочей поверхностью с захваченной деталью, а схват выполнен в виде подковообразного корпуса, на кото5 ром также с воз.можпостью взаимодействия с захваченной деталью установлены ролики и (|)икс1фуюшее устройство со стопором.
при iTOM два крайних лежащих по обе стороны от оси схвата, ролика подпружинены к корпусу во встречном направлении.
2
ности, пентр которой совпадает с осью поворота руки манипулятора, а сам направляющий :)лемепт упруго связан с основапием.
Т
фигОсь лоборо/ла
манил(/л /Т7Ора
фиг А
| Козырев Ю | |||
| Г | |||
| Промышленные работы | |||
| Справочник | |||
| М., 1983, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
