Изобретение относится к подъемно-транс портному оборудованию и преимущественно может быть использовано в конструкциях манипуляторов, а также в штабелерных устройствах и в средствах перегрузки при создании гибких автоматизированных производств.
Целью изобретения является улучи1ение динамических характеристик за счет плавности передачи усилия на руку манипулятора.
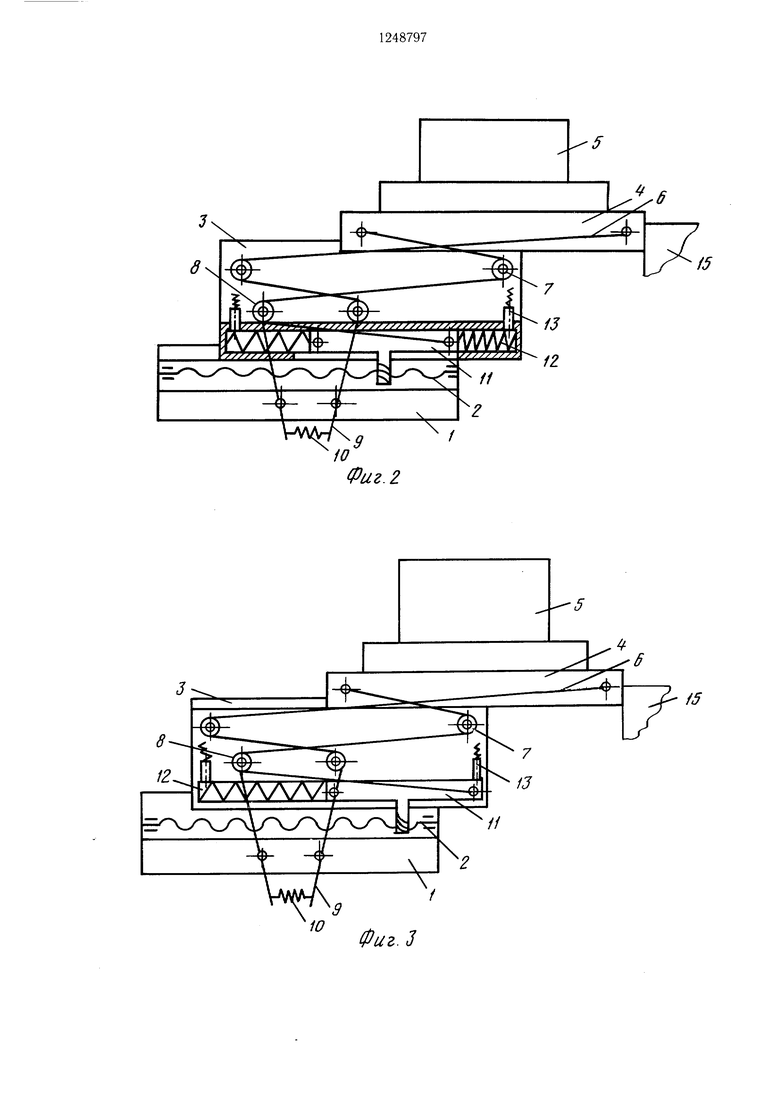
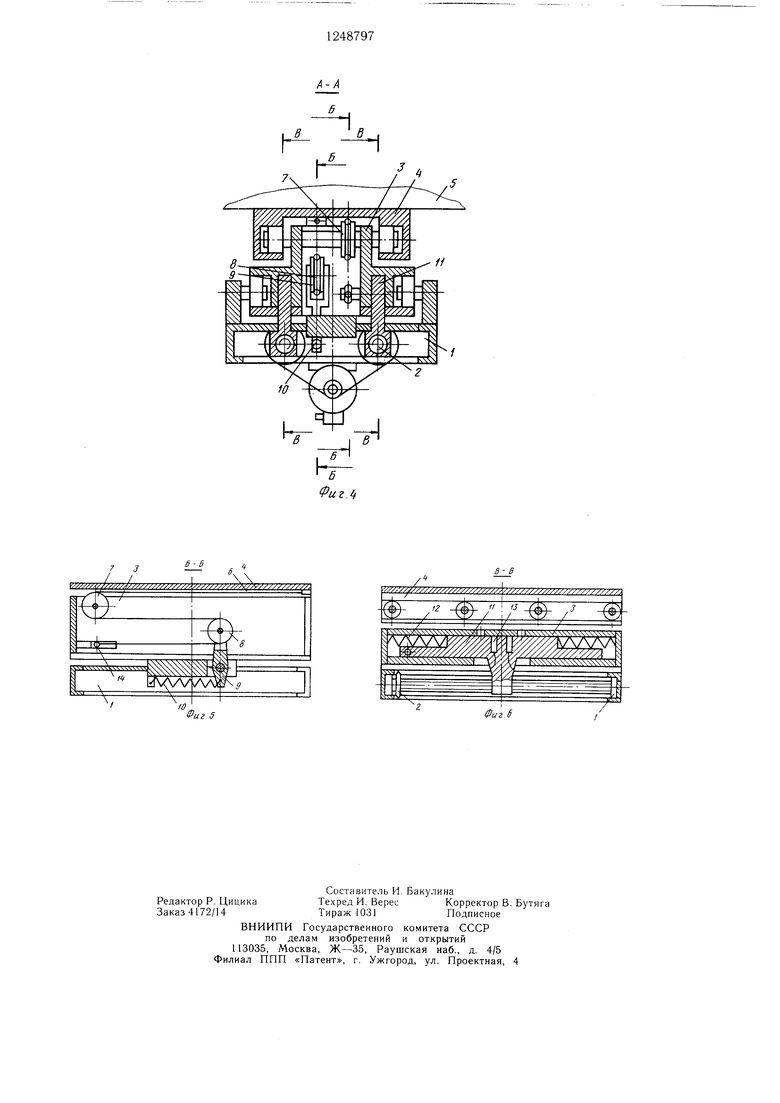
На фиг. 1 изображен манипулятор в исходном положении; на фиг. 2 - то же, в положении соприкосновения с препятствием; на фиг. 3 - то же, в положении опознания препятствия; на фиг. 4 - сечение А-А на фиг. 1; на фиг. 5 - сечение Б-Б на фиг. 4; на фиг. б - сечение В-В на фиг. 4.
Манипулятор содержит основание 1 с приводом 2, выполненным в виде ходового винта с гайкой; ползун 3, расположенный на основании 1 с возможностью перемещения в обе стороны от основания, руку 4 манипулятора, установленную в направляющих ползуна 3 с возможностью перемещения в обе стороны от ползуна и несущую спутник с деталью 5, гибкие элементы 6, связывающие между собой ползун, руку манипулятора и
Каждая часть каретки 1 имеет палец 14, соединенный с гибкими элементом 6. Гибкий элемент б перекинут через блок 8, установленный на основании 1, и блок 7, установленный на ползуне 3, и своим другим кон5 цом соединен с рукой 4 манипулятора.
Манипулятор работает следующим обра- зом.
При включении привода 2 в ту или другую сторону вращается ходовой винт, приводя- 10 щий в движение обе части каретки 11 в ту же сторону.
В начальный момент в связи с тем, что сопротивление перемещению ползуна 3 больше, чем руки 4 манипулятора, ползун 3 остается неподвижным, а рука 4 манипулятора начинает движение в сторону перемещения каретки 11 со скоростью, равной скорости каретки 11. При этом сжимается пружина 12 и усилие на ползун возрастает. Поэтому ползун 3 трогается с места, догоняет ка- 20 ретку 11 и двигается вместе с ней. За время выравнивания скоростей ползуна 3 и каретки 11, рука 4 манипулятора увеличит скорость в 3 раза. На этом переходные процессы в начале движения заканчиваются и все движущиеся части руки манипулятора (ро15
35
основание посредством блоков 7, установ- бота) перемещаются с постоянными скорос- ленных на ползуне 3, и блоков 8, установлен ных на основании 1 при помощи рычагов 9, связанных пружиной 10 для обеспечения компенсации вытяжки гибких элементов и смягчения рывков, в ползуне 3 с возможностью перемещения в обе стороны установлена каретка 11, выполненная из двух частей.
Ползун 3 выполнен из двух симметричных боковин, соединенных торцовыми крьииками, и имеет две прямоугольные в сечении полости для размещения двух частей каретки 11. В образовавщемся канале между кареткой 11 и ползуном 3 установлено по две пружины 12. Одним торцом каждая пружина 12 опирается в крыщку ползуна 3, а другим - в выступ каретки 11. Пружины 12 находятся в нагруженном состоянии, поэтому каретка 11 находится в подпружиненном состоянии относительно ползуна в любом положении относительно ползуна при своем перемещении.
Датчики 13 наличия препятствия распо- ,j ложены на ползуне в точках, соответствующих крайним положениям каретки.
40
тями. Таким образом, осуществляется сглаживание пиковых сил, скоростей и в целом пиковой мощности в начале движения.
В момент соприкосновения руки 4 манипулятора с препятствием или базовыми элементами станции 15 выгрузки рука 4 манипулятора останавливается, а каретка 11 продолжает движение с прежней скоростью. Вместе с остановкой руки 4 манипулятора останавливается и ползун 3. При дальней- щем движении каретки 11 ползун 3 движется в обратном направлении по отношению к каретке 11. Пружина 12, сжимаясь, плавно увеличивает давление на препятствие.
В момент соприкосновения руки манипулятора с препятствием на пути ее движения каретка 11 займет свое крайнее по отношению к ползуну 3 положение. При этом давление на препятствие 15 пропорционально настройке пружины 12, а датчик 13 наличия препятствия подаст сигнал в систему управления для отключения привода 2 и выполнения запрограммированного действия.
Каждая часть каретки 1 имеет палец 14, соединенный с гибкими элементом 6. Гибкий элемент б перекинут через блок 8, установленный на основании 1, и блок 7, установленный на ползуне 3, и своим другим кон. 5 цом соединен с рукой 4 манипулятора.
Манипулятор работает следующим обра- зом.
При включении привода 2 в ту или другую сторону вращается ходовой винт, приводя- 0 щий в движение обе части каретки 11 в ту же сторону.
В начальный момент в связи с тем, что сопротивление перемещению ползуна 3 больше, чем руки 4 манипулятора, ползун 3 остается неподвижным, а рука 4 манипулятора начинает движение в сторону перемещения каретки 11 со скоростью, равной скорости каретки 11. При этом сжимается пружина 12 и усилие на ползун возрастает. Поэтому ползун 3 трогается с места, догоняет ка- 0 ретку 11 и двигается вместе с ней. За время выравнивания скоростей ползуна 3 и каретки 11, рука 4 манипулятора увеличит скорость в 3 раза. На этом переходные процессы в начале движения заканчиваются и все движущиеся части руки манипулятора (ро5
бота) перемещаются с постоянными скорос-
бота) перемещаются с постоянными скорос-
j
0
тями. Таким образом, осуществляется сглаживание пиковых сил, скоростей и в целом пиковой мощности в начале движения.
В момент соприкосновения руки 4 манипулятора с препятствием или базовыми элементами станции 15 выгрузки рука 4 манипулятора останавливается, а каретка 11 продолжает движение с прежней скоростью. Вместе с остановкой руки 4 манипулятора останавливается и ползун 3. При дальней- щем движении каретки 11 ползун 3 движется в обратном направлении по отношению к каретке 11. Пружина 12, сжимаясь, плавно увеличивает давление на препятствие.
В момент соприкосновения руки манипулятора с препятствием на пути ее движения каретка 11 займет свое крайнее по отношению к ползуну 3 положение. При этом давление на препятствие 15 пропорционально настройке пружины 12, а датчик 13 наличия препятствия подаст сигнал в систему управления для отключения привода 2 и выполнения запрограммированного действия.
5
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука транспортного робота | 1985 |
|
SU1328195A2 |
| Манипулятор для правки труб на эксцентриковых прессах | 1960 |
|
SU147893A1 |
| Промышленный робот | 1979 |
|
SU770785A1 |
| Буровая стрела | 1982 |
|
SU1138489A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Устройство для калибровки отверстий | 1981 |
|
SU990426A2 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для подвода энергии к подвижному потребителю | 1986 |
|
SU1492407A1 |

/5
2
Фиг.З
«
/ S ч
V-
10
Vus S
i- а
-@- / Фиг.6
| Телескопический механизм выдвижения рабочего органа | 1977 |
|
SU663578A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
