113281952
Изобретение относится к подъемно- При включении привода 2 в ту или транспортному оборудованию, можетдругую сторону (фиг. 1) приводит- быть использовано в конструкциях ро-ся в движение каретка 11, которая, в ботов и манипуляторов и в другихсвою очередь, с помощью канатиков 6 средствах перегрузки при созданииперемещает в ту же сторону ползун 3 и гибких производственных систем и яв-руку 4.-Благодаря введению каретки ляется усовершенствованием известно-11 и соединению с ней привода и конго изобретения по авт. св. № 1248797.ца канатиков 6,.а также благодаря ус- Цель изобретения - повышение про- Qтановке пружин 12 между кареткой 11 и изводительности перегрузки за счетползуном 3 рука транспортного робота увеличения скорости руки транспорт-плавно разгоняет спутник с деталью 5 ного робота.до скорости, в три раза превышающей
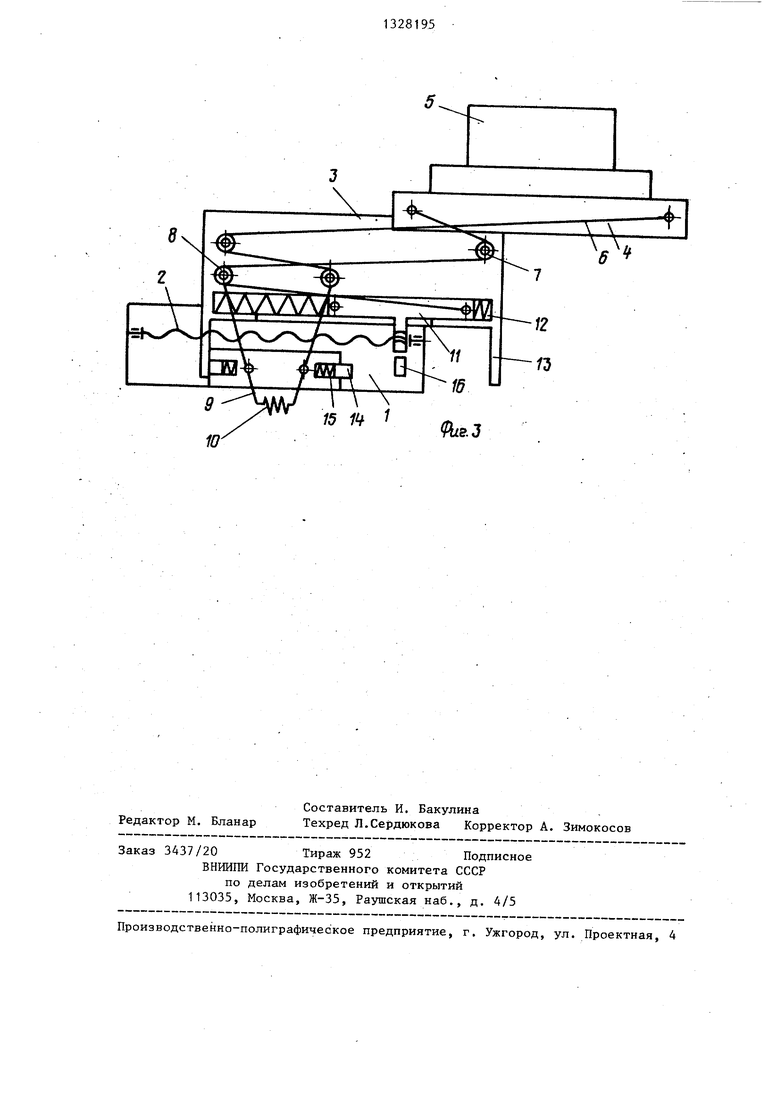
На фиг. 1 изображено устройство.,скорость каретки, а после взаимодей- общий вид; на фиг. 2 - то же, в мо- ствия упоров 13 и 14 и остановки пол- мент соприкосновения упоров; назуна 3 снижает скорость спутника 5 фиг. 3 - то же, в конце хода. .в три раза до скорости каретки 11.
Рука транспортного робота состоит Это происходит следующим образом. из основания 1 с приводом 2, включаю-В начальный момент времени движение щим ходовой винт, ползуна 3, установ- JQкаретки 11, соединенной с приводом ленного на основании 1 с возможностью2, с помощью канатиков 6 вызывает дни- перемещения в обе стороны от осно-жение ползуна 3 в обратную сторону, вания, собственно руки 4,-установлен-так как спутник с деталью 5 обладает ной на ползуне 3 с возможностью пере-достаточной инертностью. При этом мещения в обе стороны от ползуна и 25сжимается пружина 12, в связи с чем несущей спутник с деталью 5, канати-плавно возрастает натяжение канатиков 6, связьшающих между собой пол-ков 6 и усилие со стороны руки 4 на зуны 3, руку 4 и основание 1 с помо-спутник с деталью 5. Спутник с дет щью блоков 7, установленных на пол- ,талью 5 плавно разгоняется до скорор- зуне 3 и блоков 8, установленных на каретки 11, а затем и до скорости основании 1 при помощи рычагов 9,в три раза большей скорости каретки связанных пружиной 10. Введение рыча-11, при.этом переходные процессы, гов 9, связанных пружиной 10, вызва-связанные с пуском,заканчиваются и но необходимостью компенсировать вы-пол.зун движется в сторону и со ско- тяжку канатиков 6 и непараллельностьростью каретки.
его ветвей.В начальный момент взаимодействия
Iупоров 13 и 14 (фиг. 2) сжимается
Рука транспортного робота содержитпружина 15. За время сжатия пружины
также каретку 11, размещенную в пол-15 скорость ползуна ; 3 снижается до
зуне 3 с возможностью перемещения, внуля и скорость руки 4 и спутника с
обе стороны и подпружиненную пружи-деталью 5 снижается в три раза и до
нами 12 относительно ползуна 3, причемскорости каретки 11. В конечный моконцы канатиков 6 и привод 2 соедине-мент взаимодействия упоров 13 и 14
ны с кареткой 11.ползун 3 остановлен, а рука 4 и спутКроме этого, на ползуне 3 установ-ник с деталью 5 продолжают движение с
лены упоры 13, а на основании 1 упорыпониженной в три раза скоростью. 14, подпружиненные пружиной 15. Дат- в конце цикла выгрузки (фиг.З)
чик 16 конечного перемещения руки ус-каретка 11 достигает своего крайнего
тановлен на основании 1 с возможностьюположения относительно основания. В
срабатывания в крайнем положении ка этот момент срабатывает датчик 16 коретки 11 относительно основания 1.нечного перемещения руки 4, который
Упоры 13 и 14 устанавливаются так,останавливает привод 2 и дает команчто после их взаимодействия ползун 3ду на выполнение зап рограммированноостанавливается, а рука 4 еще не дош-го действия. Например, на. съем спутла до своего номинального значения хо-ника с деталью 5 и отвод руки путем
да на величину, превышающую возможноереверсирования привода 2. отклонение станции выгрузки.Возможен другой, вариант окончания
Рука транспортного робота работаетцикла выгрузки. Каретка 11 продол- следующим образом. жает движение при остановленном пол313281
зуне 3, а спутник с деталью 5 перемещается с пониженной в три раза скоростью до взаимодействия с базовыми элементами (упорами) на столе станка.
При этом спутник с деталью 5 и рука останавливается, а каретка продолжает движение до своего крайнего положения относительно основания, при котором срабатывает датчик 16.
to
В этот момент ползун 3 отходит от упора 14 и движется в обратном направлении.
954
Формул, а изо
р е т е н и я
o
Рука транспортного робота по авт. св. № 1248797, отличающая- с я тем, что, с целью повышения производительности за счет увеличения скорости перемещения руки, она снабжена упорами , размещенными соответственно на ползуне и на основании с возможностью их взаимодействия.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1248797A1 |
| Транспортная система | 1988 |
|
SU1567359A1 |
| Захватное устройство | 1985 |
|
SU1247270A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Транспортное устройство | 1990 |
|
SU1738603A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Автоматизированный комплекс горячей штамповки | 1988 |
|
SU1602602A1 |
| Устройство для приварки проволочного вывода к корпусу радиодетали | 1984 |
|
SU1191222A1 |
| Автооператор | 1986 |
|
SU1364430A1 |
| Гибкий производственный модуль | 1990 |
|
SU1824287A1 |
Изобретение относится к области подъемно-транспортного оборудования и преимущественно может быть использовано в конструкциях рук роботов и манипуляторов и в других средствах перегрузки при создании гибких производственных систем. Целью изобретения является повышение производительности перегрузки за счет увеличения скорости руки транспортного робота. Для этого на ползуне 3 и основании 1 установлены соответственно упоры 13 и 14. В начальный момент взаимодействия упоров 13 и 14 сжимается пружина 15. За время сжатия пружины 15 скорость ползуна 3 снижается до нуля, скорость руки 4 и спутника с деталью 5 снижается в три раза и до скорости каретки 11. В конечный момент взаимодействия упоров 13 и 14 ползун 3 остановлен, а рука 4 и спутник с деталью 5 продолжают движение с пониженной в три раза скоростью. 3 ил. сл с x7J / / / UAAJ I / П / 7 Т /5 / фиг./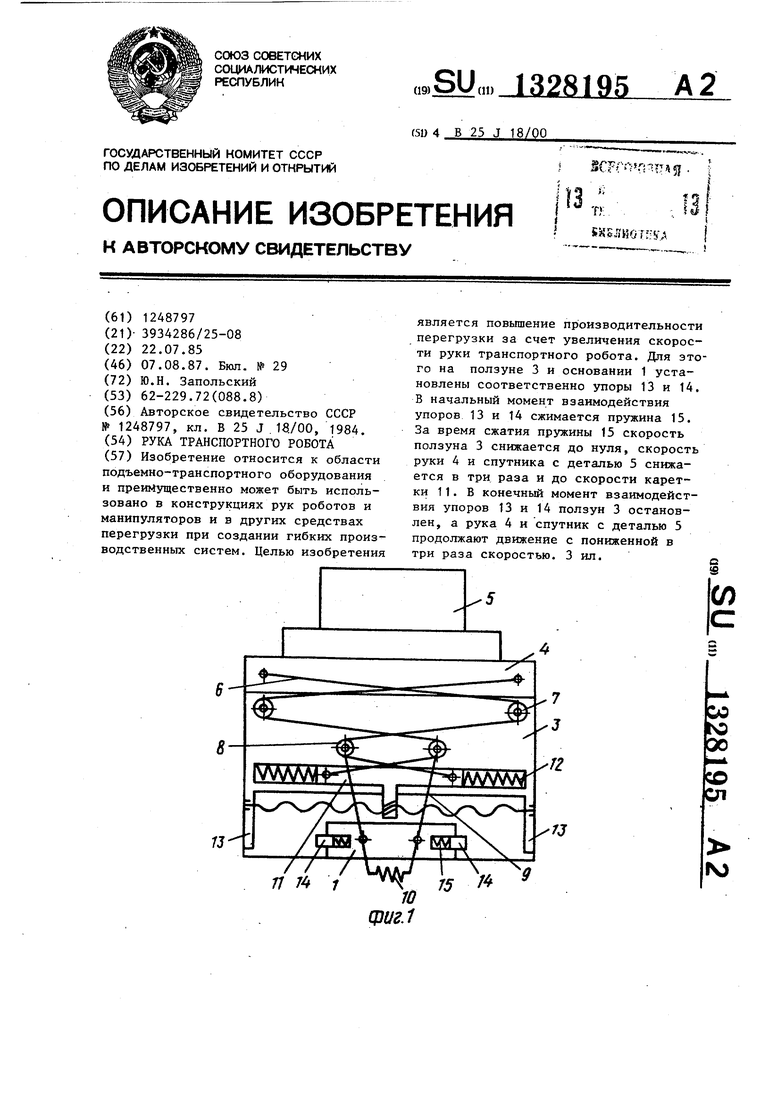
tf
Фия.2
15 1
Uis.3
Редактор М. Бланар
Составитель И. Бакулина
Техред Л.Сердюкова Корректор А. Зимокосов
Заказ 3437/20 Тираж 952Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1984 |
|
SU1248797A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
