Изобретение относится к обработке давлением листового материала, а именно к автоматизации подачи в штамп заготовок.
Цель изобретения - расширение технологических возможностей за счет подачи заготовок из неподъемной стопы.
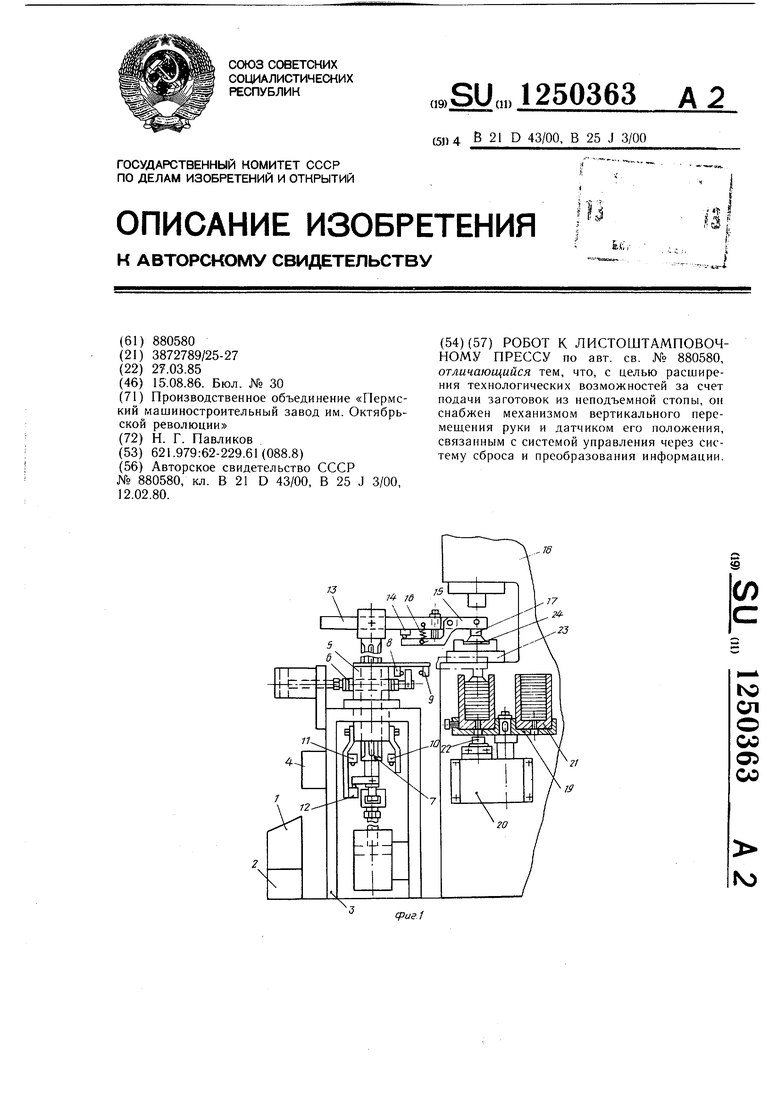
На фиг. 1 изображена схема робота для подачи в штамп заготовок из неподъемной стопы; на фиг. 2 - блок-схема.
Робот имеет систему 1 управления, систему 2 сброса и преобразования информации, станину 3, на которой закреплены привод 4 и устройство 5 преобразования энергии с механизмом б маятникового горизонтального движения руки и механизмом 7 подъема руки. Механизм снабжен дат10
ется команда через систему управления на подъем руки 13 до верхнего положения, заданного датчиком 10. Рука 13 поворачивается посредством механизма 6 и вместе с заготовкой 24 входит в зону штампа 23. Датчик 8 дает команду на опускание руки. Заготовка 24 укладывается на матрицу штампа. При упоре в матрицу рычаг 15 вновь отходит от датчика 14, в результате чего подается команда на отсоединение заготовки от захвата (например, выключением вакуумной системы) и подъем руки. Вывод руки из зоны штампа происходит от датчика 11. Одновременно с датчиком 14 срабатывает датчик 12 (контроль правильности укладки в штамп заготовок). Датчик 12 чечиками 8 и 9 конечных положений. Меха- 5 рез систему 2 сброса и систему 1 управнизм 7 имеет верхние 10 и 11 и нижний 12 конечные датчики.
На штоке механизма 7 подъема закреплена рука 13, снабженная датчиком 14 и шарнирно связанным с ней двуплечим рычагом 15, один конец которого пружиной 16 поджат к датчику 14, а второй несет захватный орган 17 (например, вакуумный или магнитный).
Робот установлен у листоштамповочного пресса 18, снабженного дисковым загрузочным устройством 19 с механизмом 20 поворота и сменными кассетами 21, а также фотодатчиком. 22.
На столе пресса установлен штамп 23 для штамповки заготовок 24.
Датчики 8 и 9 расположены на одном уровне под углом друг к другу, равным углу маятникового движения руки, и предназначены д/п подачи команд на опускание руки: датчик 8 - на матрицу, а датчик 9 - на стопу. Датчики 11 и 12 установлены в одной со штампом вертикальной плоскости.
Робот работает следующим образом.
При опускании руки посредством механизма 7 на стопу заготовок захватный орган 17 упирается в верхнюю заготовку, пружина 16 растягивается и рычаг 15 отходит от датчика 14, вследствие чего подаления дает разрешение на отключение пресса 18 от датчика 9 после вывода из зоны штампа руки в сторону стопы. В случае неправильной установки в штамп заго2р товки (с перекосом) датчик 14 сработает раньше времени (без одновременного включения с ним датчика 12), включение пресса на штамповку не производится и работа прекратится.
При взятии со стопы последней заготов25 ки фотодатчик 22 дает команду на включение механизма 20 поворота загрузочного устройства 19 после подъема руки (т.е. по команде от датчика 10) и вместо опорожненной кассеты на загрузочную позицию поступит заполненная.
Для смены кассет могут быть применены не только дисковые поворотные, но и шиберные и другие загрузочные устройства. Удаление детали из штампа производится посредством пневмосдува или другим способом.
Робот применим не только в листовой штамповке, но и для других видов работ, где необходим подъем деталей и их укладка на переменных уровнях (например, в складском хозяйстве, сборочных работах и других), но с соответствующими захватными органами.
30
35
0
ется команда через систему управления на подъем руки 13 до верхнего положения, заданного датчиком 10. Рука 13 поворачивается посредством механизма 6 и вместе с заготовкой 24 входит в зону штампа 23. Датчик 8 дает команду на опускание руки. Заготовка 24 укладывается на матрицу штампа. При упоре в матрицу рычаг 15 вновь отходит от датчика 14, в результате чего подается команда на отсоединение заготовки от захвата (например, выключением вакуумной системы) и подъем руки. Вывод руки из зоны штампа происходит от датчика 11. Одновременно с датчиком 14 срабатывает датчик 12 (контроль правильности укладки в штамп заготовок). Датчик 12 че5 рез систему 2 сброса и систему 1 управления дает разрешение на отключение пресса 18 от датчика 9 после вывода из зоны штампа руки в сторону стопы. В случае неправильной установки в штамп заготовки (с перекосом) датчик 14 сработает раньше времени (без одновременного включения с ним датчика 12), включение пресса на штамповку не производится и работа прекратится.
При взятии со стопы последней заготов5 ки фотодатчик 22 дает команду на включение механизма 20 поворота загрузочного устройства 19 после подъема руки (т.е. по команде от датчика 10) и вместо опорожненной кассеты на загрузочную позицию поступит заполненная.
Для смены кассет могут быть применены не только дисковые поворотные, но и шиберные и другие загрузочные устройства. Удаление детали из штампа производится посредством пневмосдува или другим способом.
Робот применим не только в листовой штамповке, но и для других видов работ, где необходим подъем деталей и их укладка на переменных уровнях (например, в складском хозяйстве, сборочных работах и других), но с соответствующими захватными органами.
0
5
григ Z
Составитель М. Ласточкина
Редактор М. ПетроваТехред И. ВересКорректор А.
Заказ 4361/10Тираж 783Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для обработки плоских заготовок | 1983 |
|
SU1159696A1 |
| Автоматизированный комплекс для изготовления деталей из плоского материала | 1986 |
|
SU1349847A1 |
| Автоматизированный комплекс для штамповки | 1986 |
|
SU1530305A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Автоматизированный комплекс для штамповки листовых заготовок | 1982 |
|
SU1061896A1 |
| Автоматический комплекс для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1551451A1 |
| Робот к листоштамповочному прессу | 1980 |
|
SU880580A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
