(54) РОБОТ К ЛИСТОШТАМБОВОЧНОМУ ПРЕССУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1985 |
|
SU1268254A1 |
| Робот к листоштамповочному прессу | 1981 |
|
SU990502A1 |
| Робот к листоштамповочному прессу | 1985 |
|
SU1250363A2 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Робот к листоштамповочному прессу | 1979 |
|
SU782993A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Робот к листоштамповочному прессу | 1983 |
|
SU1098624A1 |
| Промышленный робот | 1984 |
|
SU1299676A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
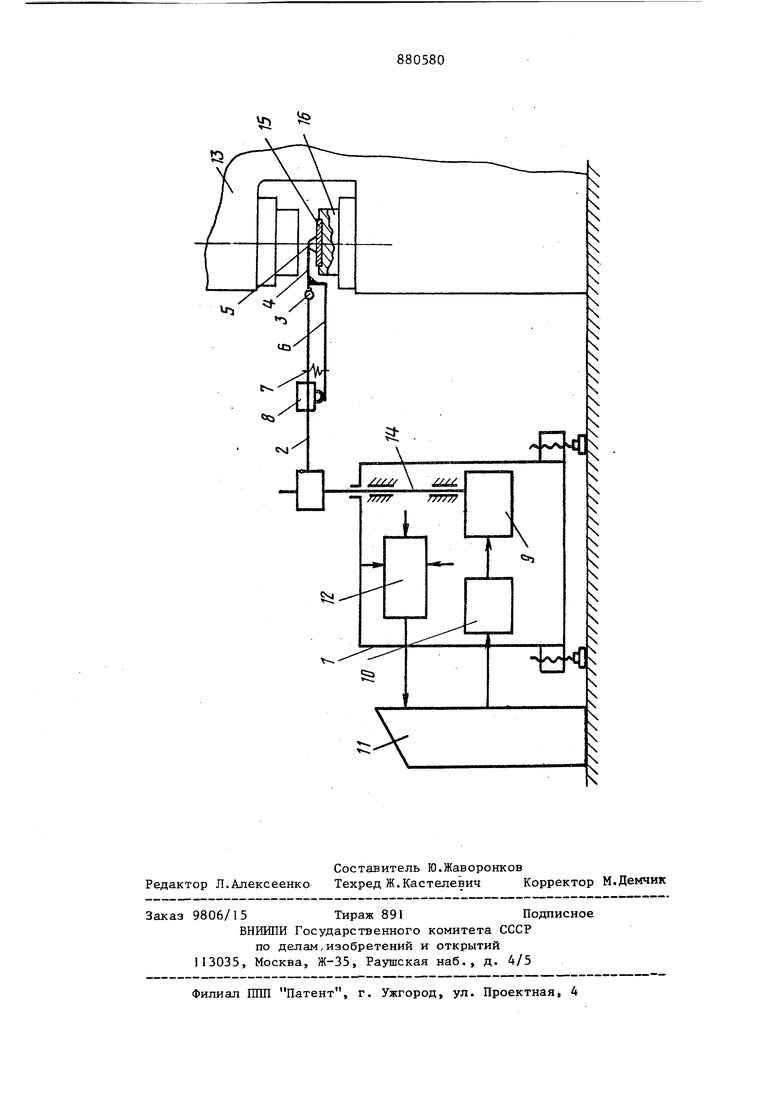
Изобретение относится к механичес кой обработке давлением листового материала, а более конкретно к манип лированию. Известен робот к листоштамповочному прессу, содержащий систему прав ления, станину, установленные в ней привод, связанный с системой управления, стойку, несущзло руку с захват ным органом, приводимую в движение по заданной программе от привода l Известный робот к листоштамповочному прессу недостаточно надежен в работе, так как в нем не предусмотрена возможность корректировки программы или остановки при изменении толщины заготовки, при неправильном положении ее в рабочей зоне пресса и т.д., что может привести к поломке робота и снижению его долговечности. Цель изобретения - повьшение надежности работы и долговечности робота к листоштамповочному прессу. Поставленная цель достигается тем, что робот к листоштамповочному прессу, содержащий систему управления, станину, установленные в ней привод и связанную с ним руку, несущую захватный орган, снабжен установленным на руке датчиком, связанным с системой управления и шарнирно закрепленным на руке двуплечим рычагом, взаимодействующим одним концом с датчиком, а захватный орган смонтирован на свободном конце двуплечего рычага. Конец двуплечего рычага, взаимодействующего с датчиком, подпружинен к руке. На чертеже изображена схема робота к листоштамповочному прессу. Робот к листоштамповочному прессу содержит станину 1, руку 2, на которой при помощи шарнира 3 закреплен двуплечий рычаг 4, на одном конце которого закреплен захватный орган 5. Другой конец 6 двуплечего рычага 4
подпружинен пружиной 7 к руке 2, на которой закреплен датчик 8, взаимодействующий с концом 6 двуплечего, рычага 4.
На станине 1 закреплен механизм 9 преобразования и передачи энергии, связанный с приводом IО управляемым системой 11 управления.
Система 1I управления связана с системой 12 сброса и преобразования информации. Робот установлен у листоштамповочного пресса 13. Рука 2 связана с механизмом 9 валом 14. Заготовка 15 укладывается в штампе 16.
Робот к листоштамповочному прессу работает следзтощим образом.
По сигналу от системы II управления включается привод 10, который че рез механизм 9 и вал 14 приводит в ;движение руку 2. Рука 2 с двуплечим рычагом 4 и захватным органом 5 перемещается в направлении пресса 13 и от него по заданной программе.
Конец 6 двуплечего рычага 4 под действием пружины 7 постоянно поджат к датчику 8.
При изменении толщины заготовки 15 или неправильной ее укладке в штампе 16 (заготовка уложена в штампе 1 6 с перекосом и упирается на кромку его ручья) рука 2 опускается по валу 14 на заданное расстояние., захватный орган 5 взаимодействует с заготовкой 15 и поворачивает двуплечий рычаг 4 вокруг шарнира 3.
Пружина 7 растягивается, и конец 6 двуплечего рычага 4 выходит из взаимодействия с датчиком 8.
Датчик 8 подает сигнал в систему 12 сброса и преобразования информации. .Система 12 подает сигнал в систему II управления.
Система 11 управления производит корректировку программы работы робота или подает сигнал на выключение привода 10.
Предложенный робот к листоштамповочному прессу достаточно надежен в работе, так как в нем осуществляется корректировка программы или его отключение при изменении толщины заготовки, неправильном ее положении в рабочей зоне пресса или нахождении в рабочей зоне пресса нескольких заготовок, что предотвращает поломку робота.
Формула изобретения
и связанную с ним руку, несущую захватный орган, отличающийс я тем, что, с целью повьш1ения надежности работы и долговечности, робот снабжен установленным на руке датчиком, связанным с системой управления и шарнирно закрепленным на руке двуплечим рычагом, взаимодействующим одним концом с датчиком, а захватный орган смонтирован на свободном конце двуплечего рычага.
Источники информации, принятые во внимание при экспертизе
i
VD
«Nl
EN
N
)Ш J77777
Э
