Изобретение относится к машиностроению и может быть использовано В npo ьпнлeинoй робототехнике для установки на роботе-манипуляторе.
Цель изобретения - расширение функшгоиальйых возможностей схвата манипулятора путем возможности измерения размеров деталей и определения их отклонения от номинала не- посредственио в схвате робота а также обнаружения выступающих локальных дефектов при захвате за внутреннюю поверхность.
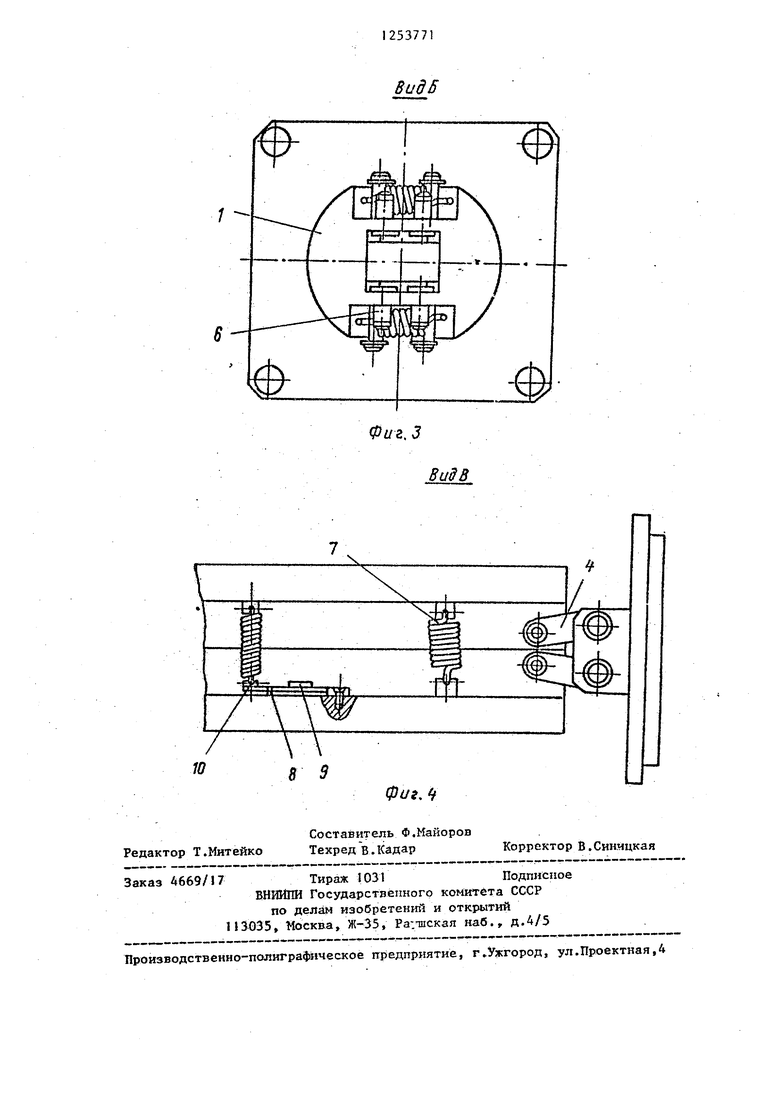
На фиг.1 изображей схват, общий вяд на фиг.2 - разрез А-А на фиг.1; на фиг.З вид Б на фиг.1; на фиг.4 - вид В на фиг,1.
Схват содержит губки I с приводом их перемещения, выполненным в виде силового пневмоцилиндра 2, фланец которого двумя парами планок 3 шар- иирИо связан с губками, а поршень - со стержнем 4 механизма синхрогшза- Ции перемещения губок, включающего также две пары клиньев 5 с взаимно параллельными сто- опами, и ттифты 6, установленные на боковых поверхностях губок 1 с возможностью взаимодействия с поверхностью кЛииьев 5. Губки подпружинены друг к другу пружинами 7. Кроме того, схват содержит устройство для измерения расстояния между рабочими поверхностями губок, состоящее из плоской пружины 8 С тензодатчвком 9 на ее поверхности.
один конец которой жестко связан с одной из губок 1, а другой - через цилиндрическую п.ужину 10 с второй губкой.
, Устройство работает следующим образом.
При подаче давления в силовой цилиндр 2 поршень со стержнем А перемещаются вперед, при этом губки I, соединенные с фланцем силового цилиндра посредством планок 3, перемещаются параллельно в противоположные стороны относительно друг друга и перпендикулярно направляющему стержню за счет взаимодействия штифтов 6 с поверх- ностью клиньев 5. Пружина 10, связанная с одной из губок, заставляет, изгибаться плоскую пружину 8, соединенную с ней, которая с одной стороны закреплена на второй губке. Величина деформации упругой планки измеряется с помощью тензодатчика 9, наклеенного на упругой планке. При этом величина сигнала от датчика характеризует значение внутреннего диаметра детали в момент соприкосновения наружных поверхностей измерительных губок с деталью. Если на внутренней поверхности измеряемой детали имеется выступающий локальный дефект, то нап- равляк11ций стержень выдвигается на расстояние, меньшее номинального заданного значения. В этом случае величина сигнала на выходе преобразова- 1теля характеризует величину дефекта.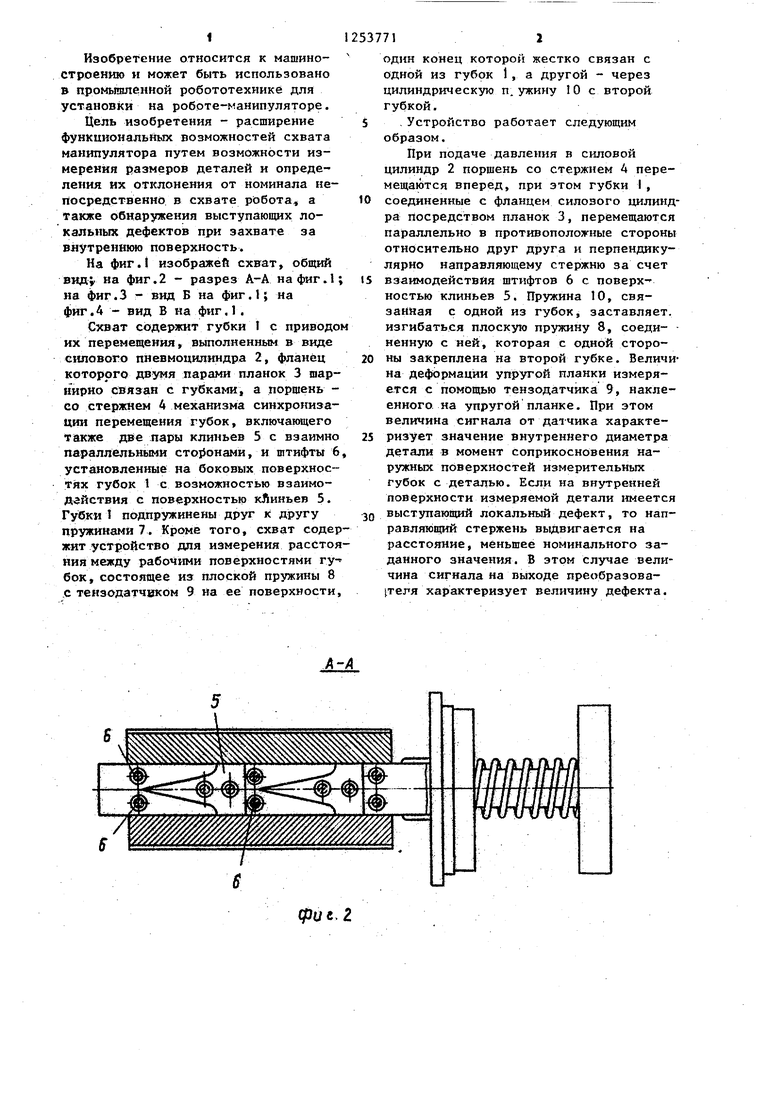
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват промышленного робота | 1985 |
|
SU1350002A1 |
| Схват | 1987 |
|
SU1419881A1 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват манипулятора для цилиндрических деталей | 1986 |
|
SU1323373A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |

cput,Z
ВидВ
Фиг, 3
ВидВ
Редактор Т.Митейко
Составитель Ф.Майоров
Техред В.Кадар Корректор В.Снницкая
Заказ А669/17 Тираж 1031 f °
ВНИИПИ Государственного комитета LC./i
по делам изобретект и открытий П3035, Москва, Ж-35, Ра:тпская наб., Д.А/5
Прои водст ённо п йграфйчё оё предприятие, г.Ужгород, ул.Проектная.4
фиг, ff
| Захват манипулятора | 1980 |
|
SU891434A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
