(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| РУКА МЕХАНИЧЕСКАЯ | 1972 |
|
SU428842A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Грузозахватное устройство | 1991 |
|
SU1787922A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Устройство для перекладки поковок | 1982 |
|
SU1026922A1 |
| Грузозахватное устройство | 1985 |
|
SU1350100A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
1
Изобретение относится к робототехнике и может найти применение в качестве захватного устройства промышленных роботов и манипуляторов.
Известны захваты промышленных роботов, состояш,ие из силового цилиндра, рычагов и зажимных губок 1.
Однако такие захваты имеют повышенные размеры в направлении кисти манипулятора (из-за радиального расположения силового цилиндра), что затрудняет их применение при манипулировании деталями больших размеров и при стесненных габаритах обслуживаемого пространства, например, при обслуживании прессов.
Известен также захват для ковочного манипулятора, содержаш;ий корпус с установленными на нем гидроцилиндрами раскрытия и закрытия клещей, связанных между собой устройством синхронизации их углового перемеш,ения 2.
Недостатками известного устройства является наличие дополнительных гидроцилиндров для раскрытия клещей, что усложняет конструкцию и увеличивает габариты захвата в поперечном направлении. Кроме того, синхронизирующий стержень.
2
установленный между гидроцилиндрами раскрытия губок и зажимными губками, не позволяет суш,ественно сократить габариты захвата в направлении кисти манипулятора, а наличие открытых трущихся ползунов и вилок синхронизирующего устройства в непосредственной близости от захватываемой детали снижает надежность устройства из-за возможности попадания в подвижные части окалины и способствует повышенному износу соединений.
10
Цель изобретения - уменьшение размеров захвата и повышение надежности работы устройства.
Указанная цель достигается тем, что силовой цилиндр снабжен перегородкой, а S поршни его снабжены гайками, при этом устройство синхронизации углового перемещения рычагов расположено внутри силового цилиндра и выполнено в виде винта, установленного с возможностью вращения в перегородке и взаимодействующего с 20 гайками, причем на концах винта выполнены несамотормозящиеся резьбы с разносторонним направлением.
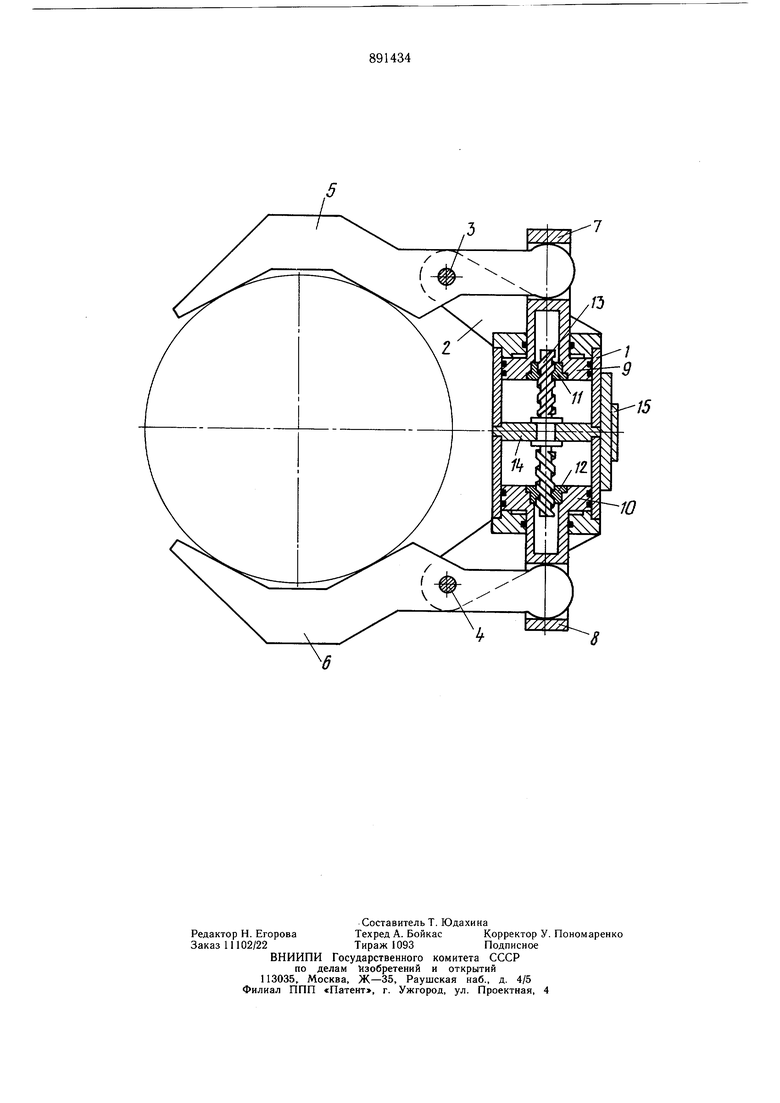
На чертеже изображен захват, разрез.
Захват манипулятора содержит силовой цилиндр 1 с закрепленными на нем щеками 2, в которых на осях 3 и 4 установлены захватные рычаги 5 и 6. Задние плечи захватных рычагов входят в пазы, выполненные в полых штоках 7 и 8, которые скреплены с поршнями 9 и 10. В поршнях закреплены гайки 11 и 12, причем одна из них выполнена с левой, а другая с правой несамотормозяш.ейся резьбой.
В зацеплении с гайками находятся концы винта 13, с соответственно выполненными разносторонними несамотормозящимися резьбами. Средняя часть винта 13 установлена с возможностью вращения в перегородке 14 силового цилиндра 1, к которому прикреплен фланец 15.
Закрытие захватных рычагов 5 и 6 происходит при подаче под давлением жидкости или воздуха в бесштоковые полости силового цилиндра. При этом поршни 9 и 10 с полыми штоками 7 и 8 расходятся в разные хтороны и захватные рычаги 5 и б, поворачиваясь между щек 2 на осях 3 и 4, зажимают деталь.
Несамотормозящийся винт 13, вращаясь в перегородке 14, обеспечивает за счет сцепления с гайками 11 и 12 синхронное раздвижение порщней 9 и 10 и, соответственно, захватных рычагов 5 и 6.
Раскрытие захватных рычагов происходит при подаче давления в штоковые полости силового цилиндра 1. Фланец 15 служит для крепления захвата к манипулятору.
В связи с размещением синхронизирующего устройства внутри силового цилиндра существенно уменьшаются габариты захвата в направлении кисти манипулятора, что позволяет уменьшить момент нагрузки от веса детали на привод сгиба кисти манипулятора и увеличить технологические возможности манипулятора с подобным захватом, создавая тем самым возможность его работы в стесненных габаритах.
Кроме того, устранение дополнительных цилиндров разжима захвата упрощает конструкцию и снижает вес захвата, а расположение синхронизирующего устройства внутри силового цилиндра уменьшает вероятность отказа в работе устройства при манипулировании с раскаленными заготовками при наличии окалины, грязи.
Формула изобретения
Захват манипулятора, содержащий силовой цилиндр с двумя поршнями и щтоками, захватные рычаги и устройство синхронизации их углового перемещения, отличающийся тем, что, с целью уменьщения габаритов захвата и повыщения надежности, силовой цилиндр снабжен жестко закрепленной в его корпусе перегородкой, а порщни его снабжены гайками, при этом устройство синхронизации углового перемещения расположено внутри силового цилиндра и выполнено в виде винта, установленного с возможностью вращения в перегородке и связанного своими концами с гайками, причем на концах винта выполнены несамотормозящиеся резьбы с разносторонними направлениями.
Источники информации, принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботы. М., «Машиностроение, 1975, с. 200. 2. Авторское свидетельство СССР № 269684, кл В 25 J 15/02, 1968.
