Известны следящие устройства типа моста для управления перемещениями подач.
В описываемом устройстве, в отличие от известных, для управления подачами на токарном станке при обработке фасонных поверхностей, оси потенциометров, устанавливаемые в плечах моста, кинематически связаны соответственно с продольной и поперечной подачами инструмента.
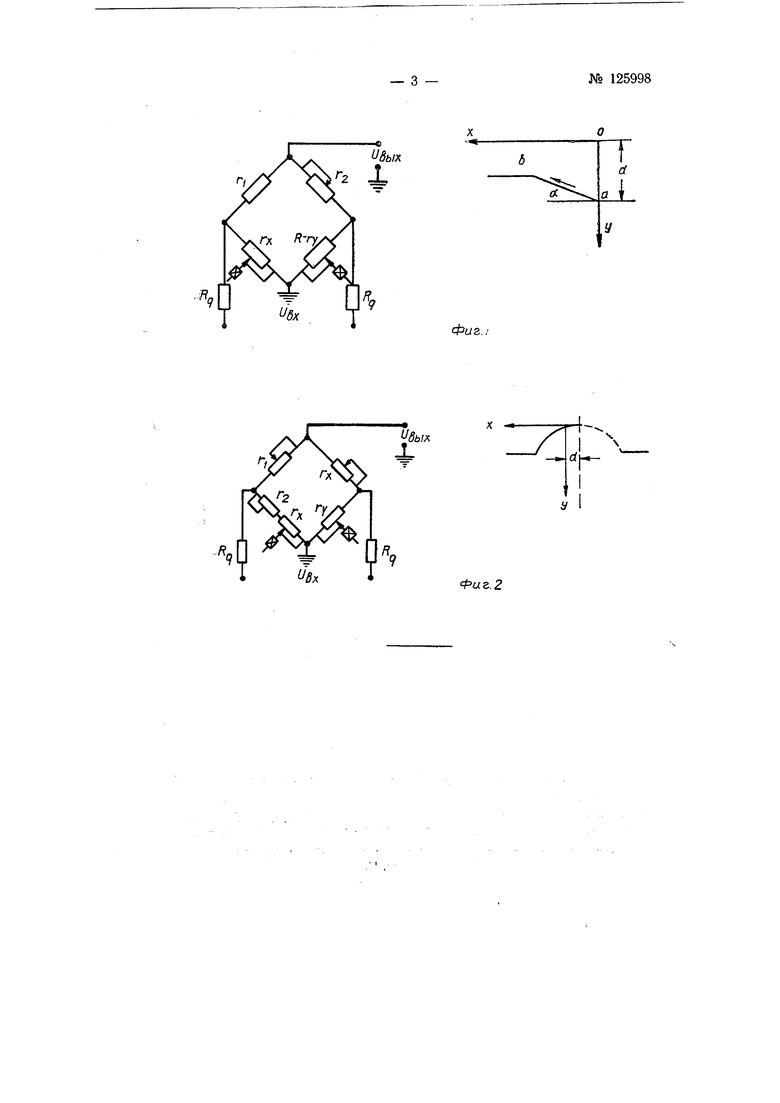
На фиг. 1, 2 показаны два варианта мостиковой схемы, состоящей из линейных омических сопротивлений.
Если необходимо обеспечить движение инструмента по линии а-b (фиг. 1), то, приняв за ось х направление продольной подачи, а за ось у- направление поперечной подачи, получим уравнение движения инструмента:
сопротивления г ,. и г у представляют собой линейные проволочные прецизионные сопротивления, оси которых точными безлюфтовыми редукторами связаны соответственно с продольным и поперечным перемещениями инструмента таким образом, что повороту оси сопротивлений на Г соответствует перемещение инструмента на тлм. по оси х н п мм по оси у.
. а - т
, у (2)
y,-kx + d (1),где k tga
№ 125998
Подставив уравнения (2) в ура(внбние (1), получим:
b тbd,„.
/-„ -/с - г.. - ...... (3)
а« «
Следовательно, если инструмент движется в соответствии с уравнением (1), то сопротивления г ,, и г будут меняться по закону (3).
Если задавать ДЕижение инструменту по оси х, а вход моста связать со следящей системой, которая обеспечит такое движение инструмента в поперечном наП)равлении, при котором напряжение на выходе моста будет поддерживаться равным нулю, то иа условия равновесия моста получим:
-у -- л-+ 1(4), где
- полное сопротивление г у.
Для того, чтобы обеспечить такое движение инструмента в поперечном направлении, при котором будет удовлетворяться условие, выраженное в уравнении (1), необходимо, чтобы
7Г-«1 )
)
Добавочное сопротивление g. необходимо для того, чтобы ограничить ток при fjf - г, 0.
Включение потенциометров по. схеме моста, изображенное на фиг. 2, позволяет получить движение инструмента по траектории, описываемой уравнением:
х d,„.
y--2R--R )
заменяя к и у значениями из уравнения (2), получим
от и J b т d У 1Г2К Т R а из условия равновесия моста
- -5 о- 2
V у
УTIГ1 -
Следовательно, для того, чтобы обеспечить движение поперечного суппорта по закону, определяемому уравнением (7), необходимо, чтобы
а л- о
/ ., - , И о -- --
Ручки потенциометров выведены на пульт управления и устанавливаются по лимбу в зависимости от значений коэффициентов R и d.
Для более точной установки потенциометров целесообразно применение двухканальной системы.
Схема следяш;его устройства в зависимости от схемы управления станка, от вида привода, от требуемой точности может быть различной.
Предмет изобретения
Следящее устройство типа моста с грубой и точной системами настройки, отличающееся тем, что для управления подачами ча токарном .станке при обработке фасонных поверхностей, оси потенциометров, устанавливаемые в плечах моста, кинематически связаны соответственно с продольной и поперечной подачами инструмента.
Фиг. I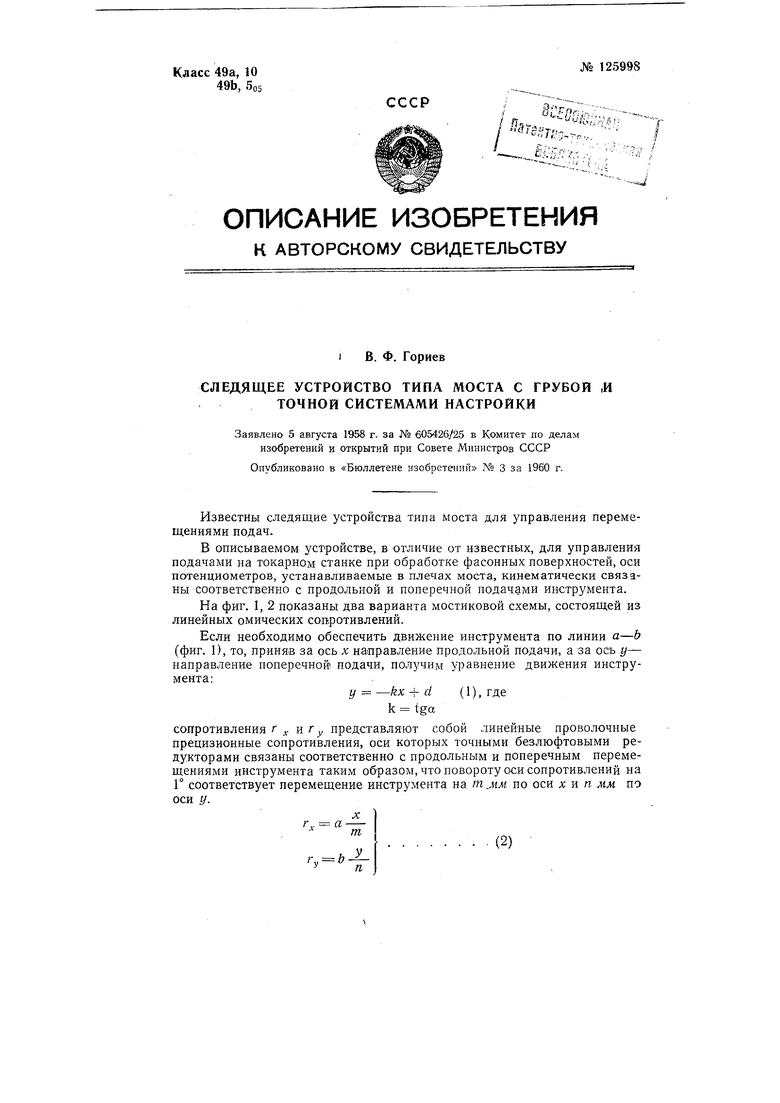

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическое устройство для копировальных станков | 1936 |
|
SU51822A1 |
| Устройство для бескопирной обработки профильных валов с равноосным контуром | 1978 |
|
SU743793A1 |
| Способ обработки некруглых валов и отверстий и устройство для его осуществления | 1991 |
|
SU1827331A1 |
| Система управления многоинструментальной обработкой | 1976 |
|
SU588065A1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| Способ обработки поверхности вращения | 1981 |
|
SU1272585A1 |
| СПОСОБ ОБРАБОТКИ ТОЧЕНИЕМ ПОВЕРХНОСТЕЙ СЛОЖНОГО КОНТУРА | 2008 |
|
RU2422248C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПРОИЗВОДСТВА ПРИБЛИЖЕННЫХ ВЫЧИСЛЕНИЙ | 1932 |
|
SU36063A1 |
| Аппарат для автоматического управления нажимным устройством прокатного стана | 1935 |
|
SU77023A1 |
| Способ токарной обработки | 1975 |
|
SU619297A1 |