Изобретение относится к устройствам для разгрузки железнодорожных полувагонов опрокидыванием.
Цель изобретения - повышение эффективности вагоноопрокидывателя.
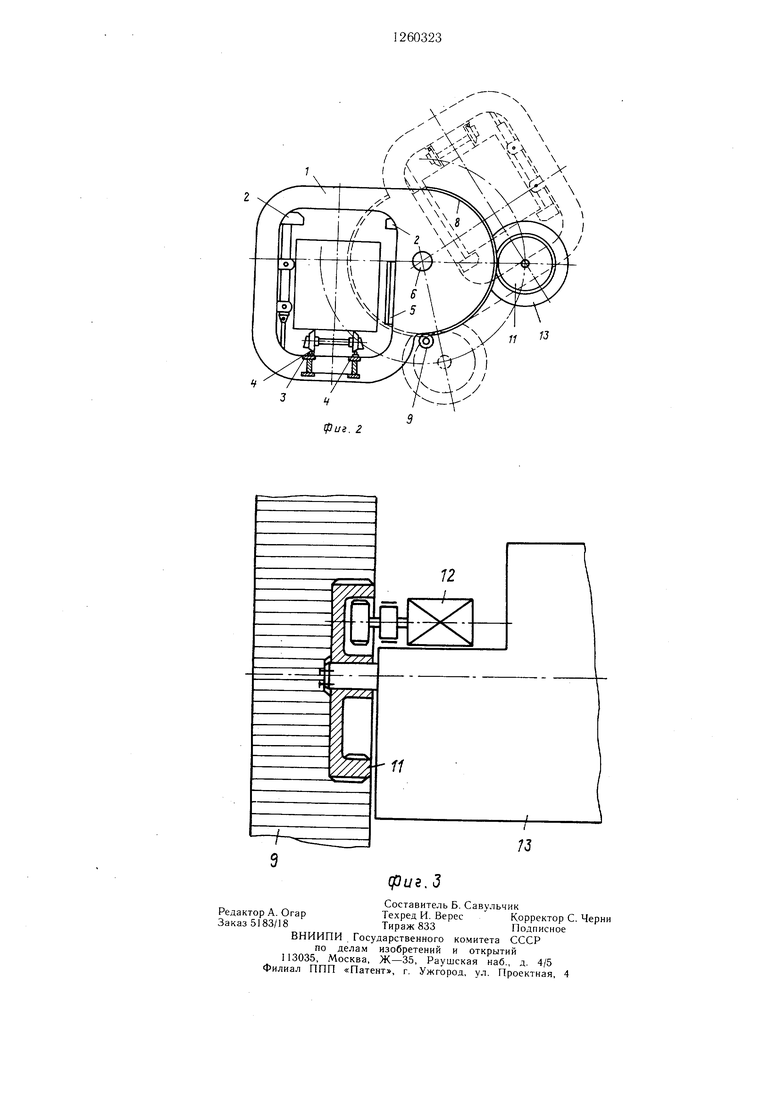
На фиг. 1 изображен вагоноопрокидыва- тель, общий вид; на фиг. 2 - схема опрокидывания вагона; на фиг. 3 - привод перемещения контргруза.
Вагоноопрокидыватель состоит из поворотной рамы 1, содержащей зажимы 2. платформу 3 с железнодорожными рельсами 4 и привалочную стенку 5. Поворотная рама своей продольной осью 6 опирается на стойки 7 и снабжена зубчатыми венцами 8, которые входят в за10
полувагона и рамы, препятствующий их опрокидыванию.
После этого включаются двигатели привода 10 опрокидывания, которые через редукторы и шестерни 9 передают движение на зубчатые венцы 8, вращая поворотную раму с полувагоном вокруг оси 6. Во время опрокидывания воздействие на датчик изменяется в зависимости от угла поворота рамы и, следовательно, он подает сигнал на изменение положения контргруза относительно венца таким образом, чтобы уравновесить систему. Фактически подвижный контргруз, создавая автоматически изменяющийся уравновешивающий момент, компенсирующий неуравновещенность мецепление с шестернями 9 привода 10 вен- 15 ханизма, позволяет снизить нагрузку на ли20
цов, смонтированного на основании, и с шестернями 11 привода 12 контргруза 13, щарнирно соединенного цапфами 14 с продольной осью поворотной рамы. Под платформой установлены датчики 15.
Вагоноопрокидыватель работает следующим образом.
При подаче полувагона 16 с подъездных путей на рельсы 4 платформы 3 полувагон устанавливается внутри поворотной рамы 1 и фиксируется зажимами 2 и при- 25 валочной стенкой 5. При этом датчики 15, установленные под платформой, подают сигнал, пропорциональный весу полувагона с грузом,, в схему управления приводом 12 механизма перемещения контргруза. Электродвигатели привода 12 вращают шестерни 11, входящие в зацепление с зубчатыми венцами 8 поворотной рамы, и перемещают контргруз 13 относительно поворотной рамы 1, изменяя плечо контргрузов относительно оси б поворотной рамы (т. е. вению привода механизма опрокидывания вагоноопрокидывателя, а следовательно, уменьшить потребляемую мощность и повысить надежность его работы. Возможность при любом угле поворота создать максимальный уравновешивающий момент исключает необходимость при.менения контргруза «с запасом на изменение угла максимального неуравновешенного момента, т. е. снижается металлоемкость конструкции.
После подъема на угол максимального опрокидывания (175°) и полного опорожнения полувагона контргруз занимает положение, при котором система могла бы возвратиться в исходное положение под действием собственного веса. Двигатели привода 30 опрокидывания в этом случае работают в режиме динамического торможения, отдавая вырабатывае.мую электроэнергию в сеть .(при соответствующей системе управления).
Для того, чтобы в процессе зацепления щестерен 9 и i 1 с одним и тем
личину уравновещивающего момента). Вели-35 же зубчатым венцом 8 поворотной рамы
чина сигнала датчика в исходном положе-они не мешали друг другу при перемении задает начальное положение уравнове-щениях, венец выполнен достаточно широщивающего контргруза таким, чтобы мо-ким для обеспечения взаимодействия укамент от его веса относительно оси пово-занных шестерен с разными участками венрота уравновесил момент от веса груженогоца по его ширине.
0
полувагона и рамы, препятствующий их опрокидыванию.
После этого включаются двигатели привода 10 опрокидывания, которые через редукторы и шестерни 9 передают движение на зубчатые венцы 8, вращая поворотную раму с полувагоном вокруг оси 6. Во время опрокидывания воздействие на датчик изменяется в зависимости от угла поворота рамы и, следовательно, он подает сигнал на изменение положения контргруза относительно венца таким образом, чтобы уравновесить систему. Фактически подвижный контргруз, создавая автоматически изменяющийся уравновешивающий момент, компенсирующий неуравновещенность ме5 ханизма, позволяет снизить нагрузку на ли
нию привода механизма опрокидывания вагоноопрокидывателя, а следовательно, уменьшить потребляемую мощность и повысить надежность его работы. Возможность при любом угле поворота создать максимальный уравновешивающий момент исключает необходимость при.менения контргруза «с запасом на изменение угла максимального неуравновешенного момента, т. е. снижается металлоемкость конструкции.
После подъема на угол максимального опрокидывания (175°) и полного опорожнения полувагона контргруз занимает положение, при котором система могла бы возвратиться в исходное положение под действием собственного веса. Двигатели привода опрокидывания в этом случае работают в режиме динамического торможения, отдавая вырабатывае.мую электроэнергию в сеть .(при соответствующей системе управления).
Для того, чтобы в процессе зацепления щестерен 9 и i 1 с одним и тем
же зубчатым венцом 8 поворотной рамы
,
ч
- -
13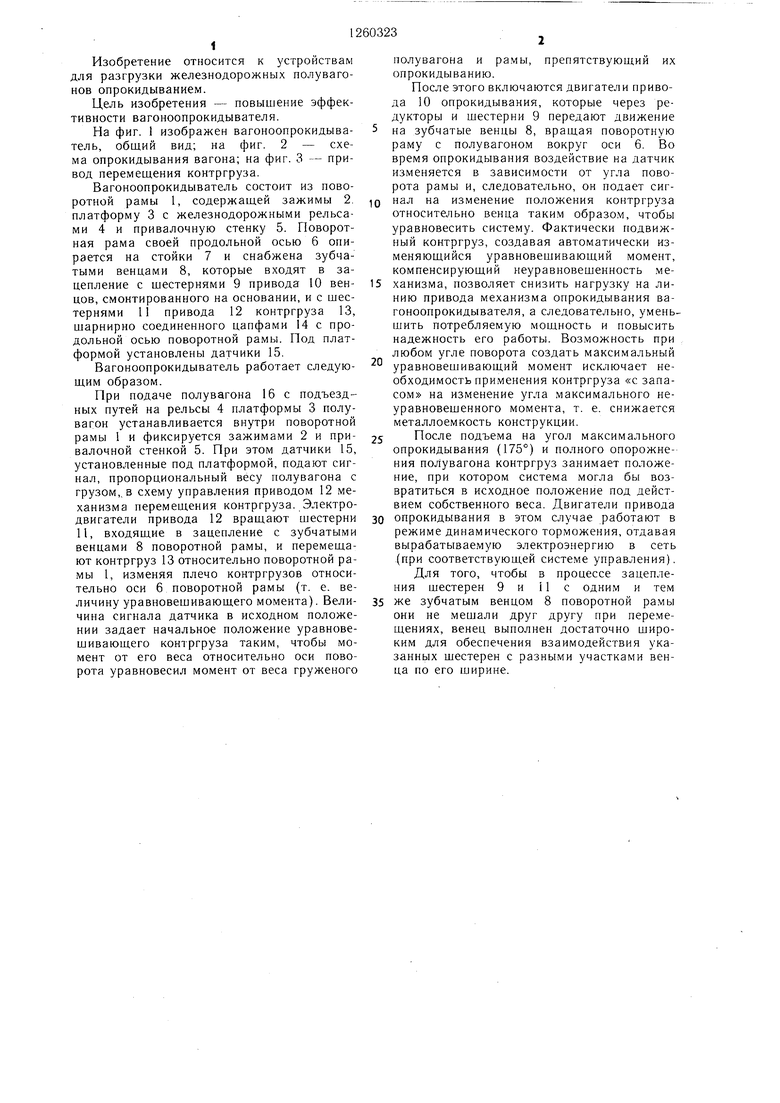
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| Передвижной боковой вагоноопрокидыватель | 1983 |
|
SU1119952A1 |
| Вагоноопрокидыватель | 1982 |
|
SU1068362A1 |
| Вагоноопрокидыватель | 1988 |
|
SU1654197A1 |
| ВАГОНООПРОКИДЫВАТЕЛЬ И СПОСОБ ВЫГРУЗКИ СЫПУЧИХ ГРУЗОВ ИЗ ПОЛУВАГОНА | 2011 |
|
RU2494033C2 |
| Вагоноопрокидыватель | 1985 |
|
SU1219508A1 |
| Вагоноопрокидыватель | 1989 |
|
SU1691251A1 |
| Вагоноопрокидыватель | 1972 |
|
SU441224A1 |
| Вагоноопрокидыватель | 1991 |
|
SU1787914A1 |
| Вагоноопрокидыватель | 1983 |
|
SU1102754A1 |

Составитель Б. Савульчнк
Редактор А. ОгарТехред И. ВересКорректор С. Черни
Заказ 5183/18Тираж 833Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
(pus. 3
| Стационарный боковой вагоноопрокидыватель | 1959 |
|
SU125756A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
