Изобретение относится к вычислительной технике и может быть использовано при проектировании цифровых устройств высокой надежности.
Целью изобретения является повышение точности контроля (локализации неисправностей) программируемой логической матрицы (ГШМ).
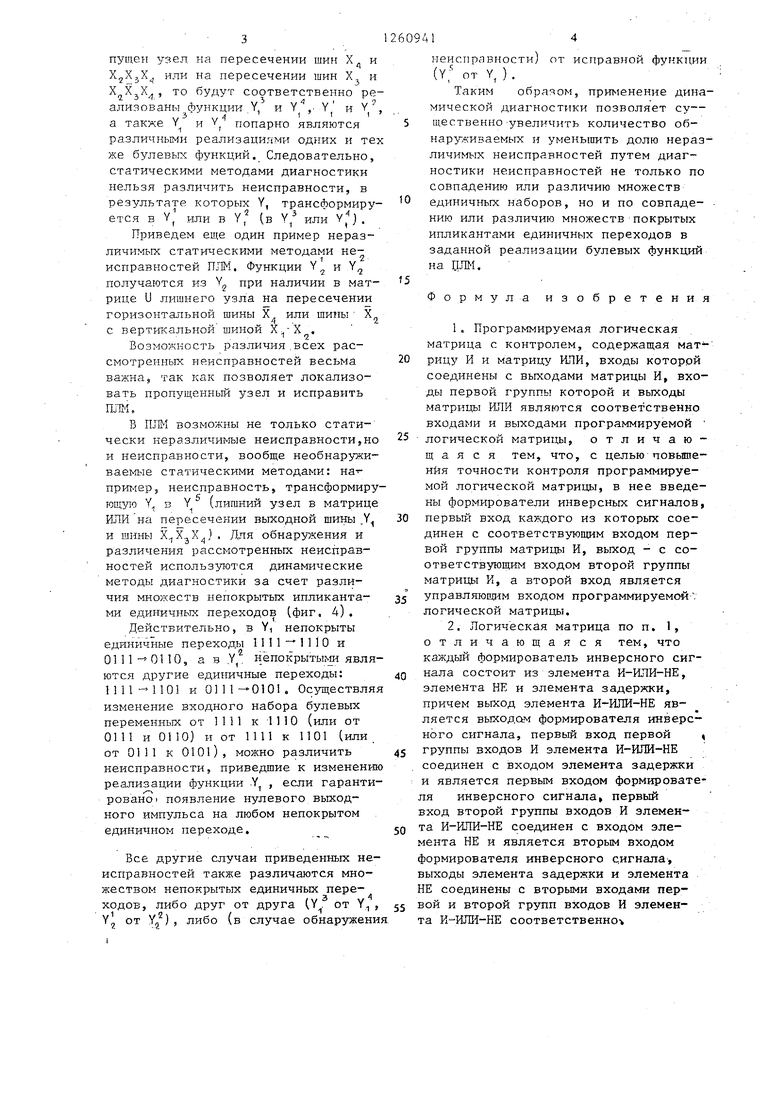
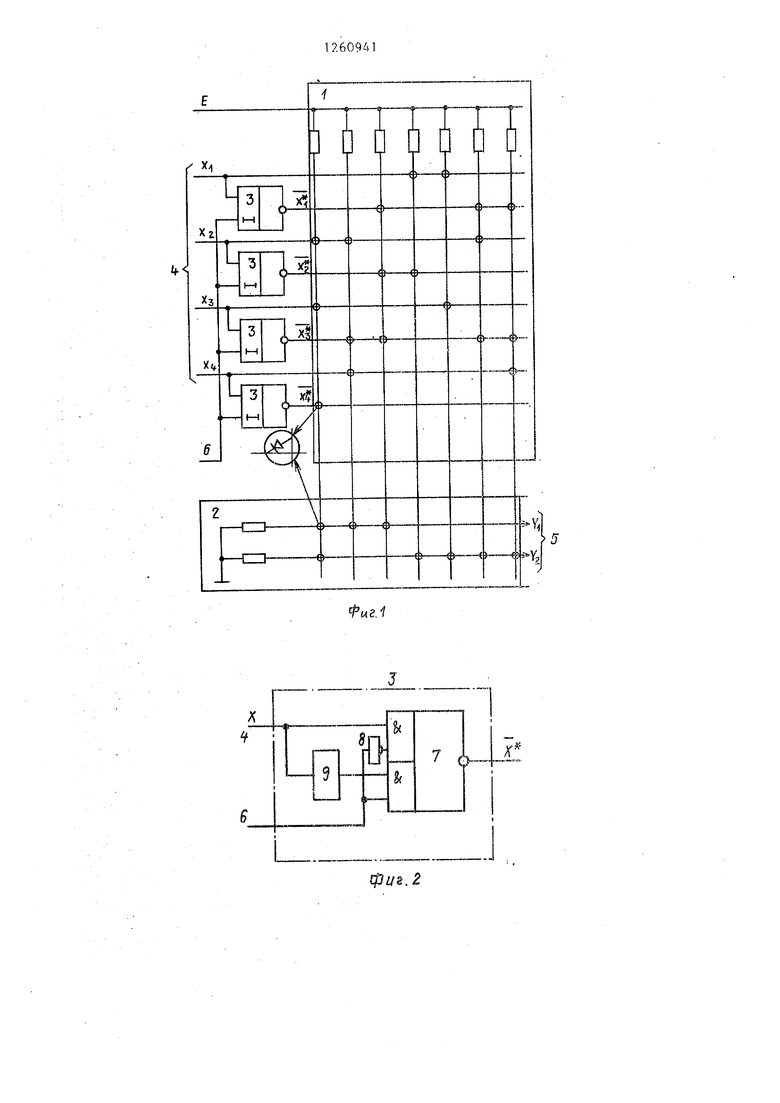
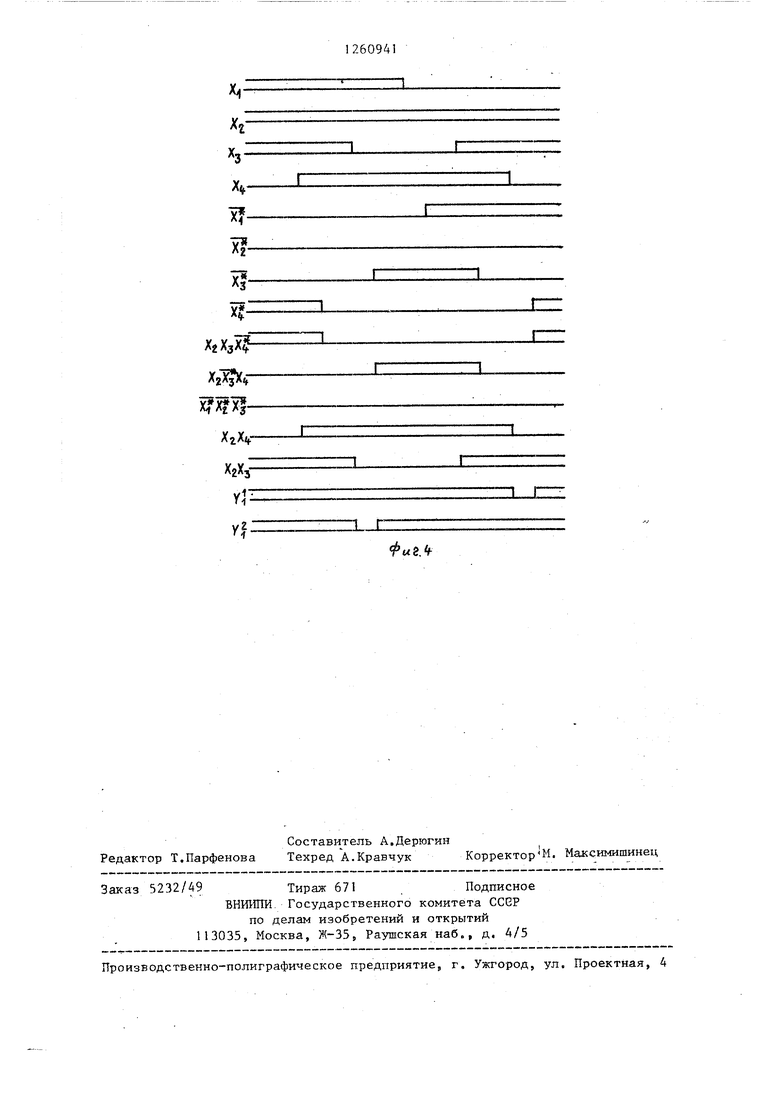
На фиг. 1 приведена схема ПЛМ; на фиг, 2 - схема формирователя инверсных сигналов; на фиг, 3 - карты Карно, описывающие булевы функции, реализованные ПЛМ (фиг, 1), на фиг, 4 - временная диаграмма .работы ПЛМ (фиг, 1),
Программируемая логическая матрица (фиг, О содержит матрицу И 1, матрицу ИЛИ 2 и формирователи 3 инверсных сигналов. Нечетные горизонтальные шины матрицы И образуют ее первую Группу входов и являются входами ПЛМ 4, четные горизонтальные шины матрицы И образуют ее вторую группу входов, Вертикальные шины матрицы И являются ее выходами и входами матрицы ИЛИ, горизонтальные шины матрицы ИЛИ -являются выходами Щ1М 5. В некоторых узлах горизонтальные шины матрицы И соединены с вертикальными шинами с помощью диодов. Этим обеспечивается формирование на вертикальных шинах импликант представляющих собой конъюнкцию нескольких входных булевых переменных В некоторых узлах вертикальные и горизонтальные щины матрицы ИЛИ соединены диодами, чем обеспечивается дизъюнкция импликант, сформированны в матрице ИЛИ, На фиг. 1 показан также управляющий вход ПЛМ 6, Формирователь 3 инверсного сигнала (фиг, 3) содержит элемент И-ИЛИ-НЕ элемент НЕ 8 и элемент задержки,9, При нулевом значении сигнала на управляющем входе 6 предлагаемая ПЛМ работает также, как и известная
При единичном значении сигнала на входе 6 инверсные значения входных сигналов формируются с задержко Это позволяет обнаружить и локализовать большее число неисправностей чем в известной ПЛМ,
Наиболее характерные неисправности ПЛМ - отсутствие нужного или наличие лишнего узла в матрицах И или ИЛИ, Подобные неисправности могут быть обнаружены и локализованы с помощью статических методов диагностики лишь в случае, если изменяются булевы-, функции, реализованные на выходах ПЛМ, т,е, изменяются множества единичных наборов какой-либо
реализуемой функции (на единичных входных наборах значения булевой функции равно 1),
Во время работы ПЛМ при изменении одной или нескольких вхЬдных булевых переменных (переход от одного входного набора к другому) выходные логические значения должны оставаться постоянными ИЛ.И изменяться в зависимости от реализованной на этом
выходе булевой функции, что исполь- . зуется в упомянутой статической диагностике ПЛМ. В случае, если выходной сигнал должен оставаться равным единице (на единичном переходе - при
переходе от одного единичного набора к другому) в результате состязаний (гонок) возмоя:но кратковременное появление логического нуля. Это возможно лишь в с 1учае, когда клетки карты Карно, соответствуюшие исходному и конечноьту единичным входным наборам, содержат единицы (единичный переход) , н:о не объединены (не покрыты) общей импликантной (непокрытый единичный переход), Это
свойство используется для реализации динамической диагностики ПЛМ, при которой для диагностических целей используются: не только установившиеся статические значения на выходе Диагностируемой ПЛМ, но и вес цифровой переходный процесс на выходе ПЛМ,
Для иллюстрации сказанного рассмотрим изображенные на фиг, 3 карты Карно, описываюшле булевы функции, реализованные ПЛМ (фиг, 1) как в исправном состоянии, так и при наличии некоторых неисправностей,
Функции Y и Y реализуются исправной ПЛМ, Если при программировании ПЛМ в матрице и будет пропущен узел на пересечении горизонтальной шины Xj и вертикальной шины, на которой формируется импликанта (в дальнейшем все вертикальные шины будем обозначать сформированными на них ипликантами), или будет пропущен узел на пересечении горизонтальной шины Х и вертикальной шины X Х,Х , то вместо Y будут соответственно реаггизованы функции
(ОI
Y и Y , Если в матрице U будет проnyuien узел на пересечении шин Х и XjXjX или на пересечении шин X и , то будут соответственно реализованы функции Y, и , иУ а также Y и Y, попарно являются различными реализациями одних и тех же булевых функций. Следовательно, статическими методами диагностики нельзя различить неисправности, в результате которых У, трансформируется в У, или в У, (в У/ или У, }.
Приведем еще один пример неразличимых статическими методами неисправностей ПЛМ, Функции У и У,2 получаются из У. при наличии в матрице и лишнего узла на пересечении горизонтальной шины X или шипы Х, с вертикальной шиной ,
Возможность различия.всех рассмотренных неисправностей весьма важнаS так как позволяет локализовать пропущенный узел и исправить ГШ1-1.
Б ПЛМ возможны не только статически неразличимые неисправности,но и неисправности, вообще необнаруживаемые статическими методами: нач- прш-шр, неисправность, трансформирующую У, в У (лишний узел в матрице ИЛИ на пересечении выходной шины .Y и шины ) . Для обнаружения и различения рассмотренных неисправностей используются динамические методы диагностики за счет различия множеств непокрытых ипликанта- ми единичных переходов (фиг, 4).
Действительно, в Y, непокрыты единичные переходы 1111 - 111 О и 01 11 - 0110, а 3 У. н ёпокрыть ш являются другие единичные переходы: 1111 -- 1101 и Olll- OlOl. Осзществляя изменение входного набора булевых переменных от 1111 к -11 10 (или от 0111 и 0110) и от 1111 к 1101 (или от 0111 к 0101), можно различить неисправности, приведшие к изменению реализации функции У , если гаранти- рован о появление нулевого выходного импульса на любом непокрытом единичном переходе.
Все другие случаи приведенных неисправностей также различаются множеством непокрытых единичных переходов, либо друг от друга (Y. от Y,, , Yj от Yj) , либо (в случае обнаружени
неисправности от исправной функции (У, от у, ) .
Таким образом, применение динамической диагностики позволяет су- щественно увеличить количество обнаруживаемых и уменьшить долю неразличимых неисправностей путем диагностики неисправностей не только по совпадению или различию множеств
единичных наборов, но и по совпаде- . нию или различию множеств покрытых ипликантами единичных переходов в заданной реализации булевых функций на ПЛМ.
Формула изобретения
1. Программируемая логическая матрица с контролем, содержащая мат- рицу И и матрицу ИЛИ, входы которой соединены с выходами матрицы И, входы первой группы которой и выходы матрицы ИЛИ являются соответственно входами и выходами программируемой логической матрицы, отличающаяся тем, что, с целью повышения точности контроля программируемой логической матрицы, в нее введены формирователи инверсных сигналов, первый вход каждого из которых соединен с соответствующим входом первой группы матрицы И, выход - с соответствующим входом второй группы матрицы И, а второй вход является управляюпщм входом программируемой , логической матрицы.
2. Логическая матрица по п. 1, отличающаяся тем, что каждый формирователь инверсного сиг- нала состоит из элемента И-ИЛИ-НЕ, элемента НЕ и элемента задержки, причем выход элемента И-ИЛИ-НЕ является выходам формирователя инверсного сигнала, первый вход первой « группы входов И элемента И-ИЛИ-НЕ соединен с входом элемента задержки и является первым входом формирователя инверсного сигнала, первый вход второй группы входов и элемен- та И-ИПИ-НЕ соединен с входом элемента НЕ и является вторым входом формирователя инверсного сигнала, выходы элемента задержки и элемента НЕ соединены с вторыми входами пер- вой и второй групп входов И элемента И ИЛИ-НЕ соответственно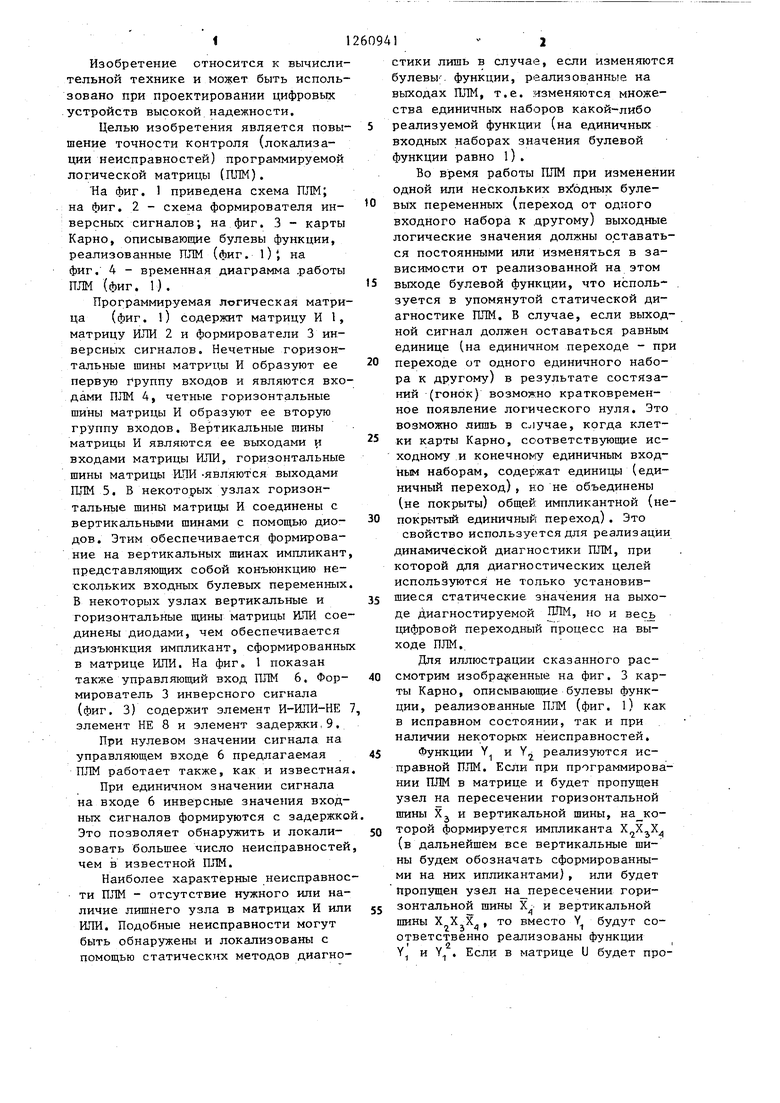
| название | год | авторы | номер документа |
|---|---|---|---|
| Программируемая логическая матрица | 1989 |
|
SU1695387A1 |
| Программируемая логическая матрица | 1986 |
|
SU1381481A1 |
| Программируемая логическая матрица | 1980 |
|
SU935945A1 |
| Устройство для контроля программируемых логических матриц | 1983 |
|
SU1236486A1 |
| Резервированное устройство | 1991 |
|
SU1785089A1 |
| ЦИКЛИЧЕСКИЙ СПОСОБ ЛОКАЛИЗАЦИИ НЕКОНТРОЛИРУЕМЫХ МНОЖЕСТВЕННЫХ ОТКАЗОВ ТЕХНИЧЕСКИХ СИСТЕМ В ПРОЦЕССЕ ИХ ФУНКЦИОНИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2557441C2 |
| Программируемая логическая матрица | 1988 |
|
SU1621020A1 |
| Программируемая логическая матрица | 1989 |
|
SU1695383A1 |
| Устройство для программного управления | 1987 |
|
SU1439535A1 |
| Устройство для контроля логических блоков | 1991 |
|
SU1833879A1 |
Изобретение относится к вычислительной технике и может быть использовано при проектировании цифровых устройств высокой надежности. Целью изобретения является повышение точности контроля программируемой логической матрицы (ППМ). достигается введением в ПЛМ формирователя инверсных сигналов с различной задержкой. В случае малого значения задержки предложенная ПЛМ работает как известная. В случае большого значения задержки в предложенной ПЛМ удается увеличить количество обнаруживаемых и уменьшить ко личество неразличимьгхнеисправностей, благодаря возможности применения метода динамической диагностики. 1 з.п. ф-лы, 4 ил. сл tc о (0 4
7
0-4
фи.2
Xr
v ЛГ
7«ЛЗ
X tXgXjX
J xfXiX/rХаХзy|vfJL
| Горяшко А.П | |||
| Синтез программируемых логических матриц с малой трудоемкостью тестового диагностирования- | |||
| Известия АН СССР | |||
| Техническая кибернетика, 1984, № 1, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| Баранов С.И., Синев Ъ.Е., Автоматы и программируемые матрицы | |||
| Минск,:; Вышэйшая школа, 1980, с | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
