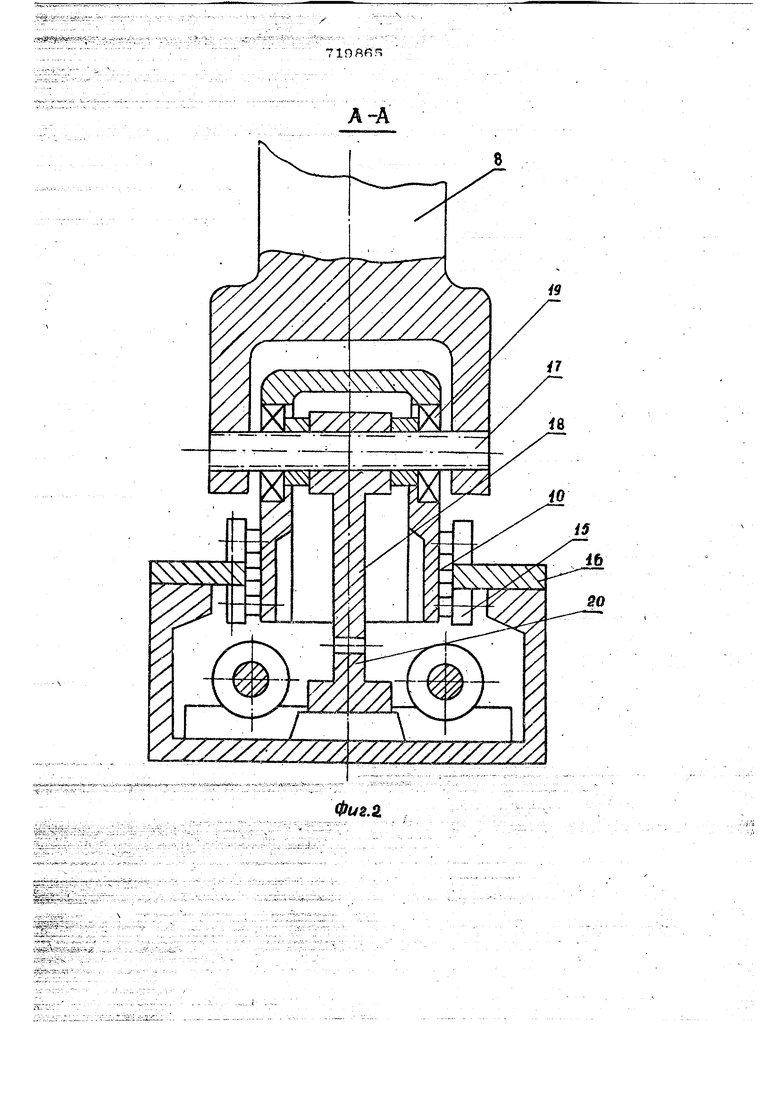
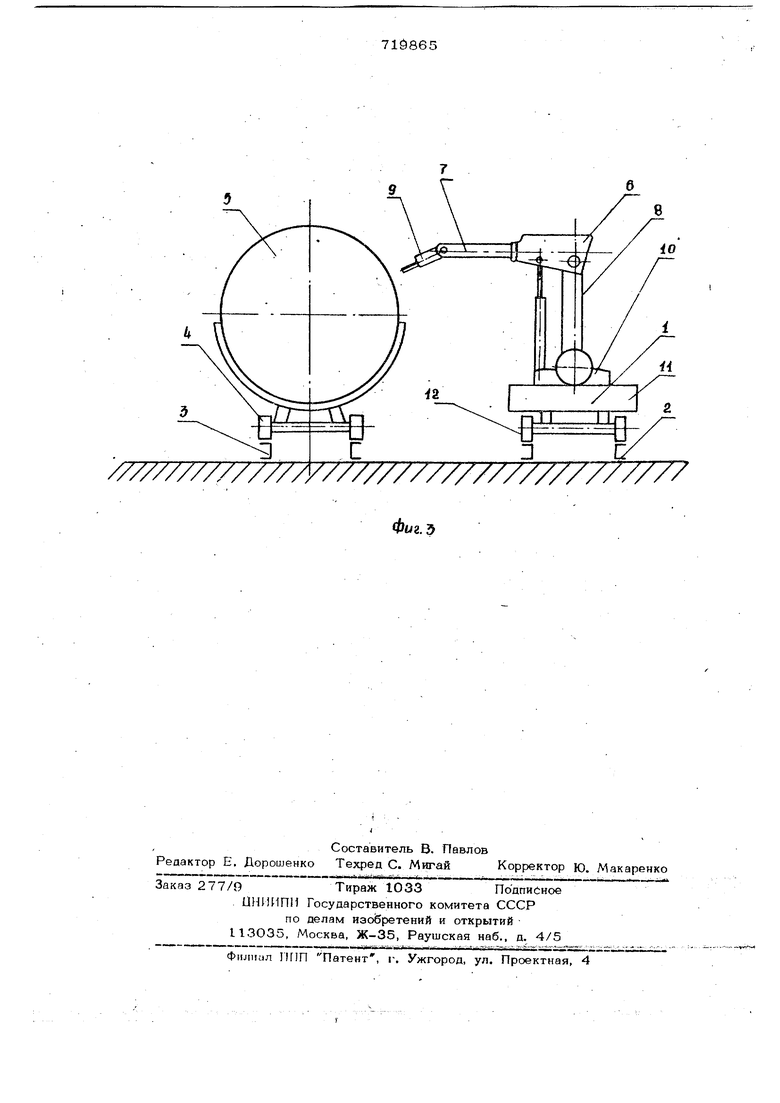
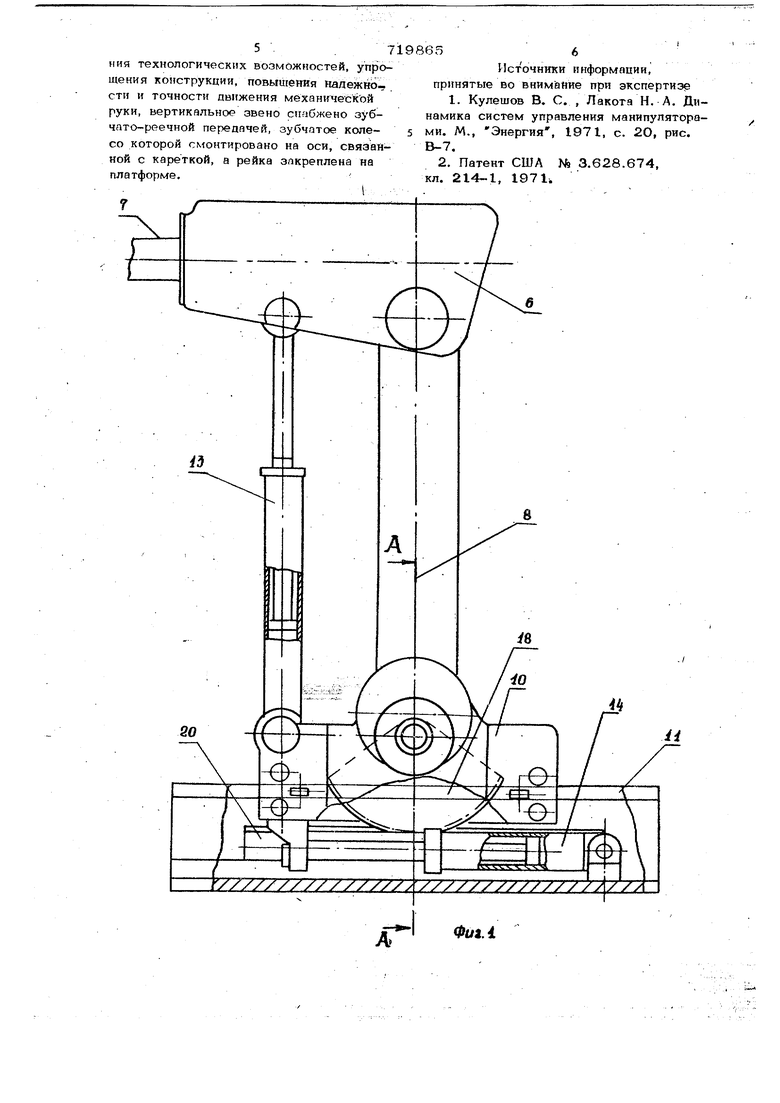
Изобретение относится к машинострое нию, а именно к промышленным роботам и манипуляторам, предназначенным для автоматизации технологических процессо в частности, нанесения теплозащитного покрытия на крупногабаритные длинномерные конструкции. Известен промышле«ный робот, предназначенный для автоматизации технологических процессов, в котором содержится механическая рука, вертикальное звено которой при помощи оси связано с подвижной платформой И . Недостатком указанного промышленного робота является то, что он обслуживает рабочую зону с небольшими размерами, которые ограничены в одном из направлений только ходом вертикального звена. Наиболее близким к предлагаемому является промышленный робот, содержащий механическую руку, вертикальное эаеро которой при помощи оси связано с кареткой, соединенной своими направляклцими с подвижной платформой L2. Недостатком этого робота является то, что рука и каретка имеют самостоятельные гидроприводы. При выдвижении руки в- продольном направлении на величину более наперед заданной в гидроэлектрическом вьпслгочателе растет давление, в результате чего замыкается электрическая цель управления движением каретки. Последняя перемещается в том же направлении, в котором первоначально двигалась рука, а рука перемещается несколько назад. Увеличенный размер рабочей зойы обеспечивается как собственным ходом руки, так и ходом каретки. Совместное перемещение руки и кареТ ки такого робота приводит к остановам и перебегам кисти, на которой устанавлирается рабочий орган, в момент включерия движения каретки, остановки и возвращения руки, т.е. заданная траектория 3 проходится рабочим орг-аном с большой ошибкой. Эта сялибка кежепательна,.при окраске различных изпелий и недопустима при на несении теплозащитных покрытий, где на кладьгваются жесткие требования к толщине покрытия. Кроме того в конструкц робота усложено управление этими двум связанными движениями: используются три электрогидравлических распределителя и гидроэлектрический выключатель, па tf nirn ion iirrr T Ti :i/-«VMi} ш-Т1ГП1/мта-Г тттчто снижает надежность работы. Цель изобретения - расширение технологических возможностей, упрощение конструкции, повышение надежности и точности движения механический руки. Цель достигается тем, что вертикаль ное звено снабжено зубчато - реечной передачей, зубчатое колесо котфой смо тировано на оси, связанной с кареткой, а рейка закреплена на платформе, На фиг. 1 изображен промышленный робот в разрезе ,обший вид; на фиг.2 разрез А-А на фиг. 1; на фиг, 3 - промышленный робот в работе. Промышленный робот 1 установлен на рельсах 2, вдоль которых он может перемещаться. На параллельных рельсах 3 на jeлежке 4 установлен отсек 5. Размеры отсека могут быть такими. Что пре- , вышают зону, в пределах которой опера тор, находящийся на полу, может обработать/И(зделие вручнуй). Рука б робота 1 содержит горизонтальный -7 и вертикальный в шарнирно связанные рычаги. На конце рычага 7 установлена шарнирно кисть 9, к которой крепится распылитель теплозащитной массы. Рычаг шарнирно связан, с кареткой 10, котора может перемещаться в поперечном, на- правлении. Платформа 11 снабжена коле сами 12. На подвижной каретке 10 щарнирно установлен гидроцилинд{э 13 поворота горизонтального рычага, шток которого соединен шарнирно с этим рычагом. Гид роцилиндр 14 (их предусмотрено два) установлен на платформе 11,. а, его шток соединен с корпусом подвижной каретки 10. Гидроцилиндр поворота кисти (на чертеже не. обозначен) установлен между горизонтальным рычагом 7 и кистью 9. Каретка 10 имеет ролики 15, охват вакяцие направляющие 16. Ось 17 соед няет вертикальный рычаг 8 руки с кареткой 10. Ось 17 имеет йа наружной 65 поверхнОстиГйГЛицыГ которые входят в шлицевые отверстия вертикального рычага 8 и зубчатого сектора 18. Таким образом зубчатый сектор 18 установлен неподвижно относительно вертикального рыча га 8. На оси 17 установлены подшипники 19, наружные, кольца которых посажены в корпус каретки 10. Зубчатый сектор 18 введен в зацепление с рейкой20. рейка закреплена неподвижно на плат. --. j форме 11. Робот 1 снабжен пультом ручного управления (на чертеже не обозначен), который используется при программировании робота методом обучения . Промышленный робот работает следующим образом. В процессе программирования робот 1 перемещается по рельсам 2 вдоль неподвижного отсека 5с заданной скоростью. При этом оператор, который находится на платформе робота, с. помощью ручного пульта управляет тремя движениями: поворотом кисти 9, поворотом рычага 7 и перемещением каретки 10, т.е. управляет раб.отой соответствующих трех цилиндров. При движении штока гидроцилиндра 14 каретка вместе с рычагом 8 перемещается в поперечном направлении. В следств:Ие того, что сектор 18 находится в зацеплении с рейкой 2О, при движении каретки сектор 18 поворачивается и вместе с ним поворачивается относительно каретки рычаг 8 руки. Следовательно, при работе гидроцилиндра 14 рычаг 8 участвует в двух зависимых движениях - переносном, вместе с кареткой, и относительном, поворачиваясь вокруг оси каретки. При управляемых движениях обеспечивают проведение распьшителя по заданной траектории, и нанесение покрытия на отсек по заданной схеме покрытия с обходом окон, платиков и пр. При этом движение распылителя при одновременном движении каретки и вертикального рычаI-a руки будет происходить плавно; без остановок и перебегов. Формула изобретения Промышленный робот, содержащий механическую руку, вертикальное звено котррой при Г1ОМОЩИ оси связано с карет- кой, соединенной своими направляющими, с подвижной платформой, отличающ и и с я тем, что, с целью расширеПИЯ технологических возможностей, уп{зощения конструкции, повышения надежностн и точности движения механической руки, вертикальное звено сн абжено зубчато-реечной передачей, зубчатое колесо которой смонтировано на оси, связанной с кареткой, а рейка закреплена на платформе.
Источники информации, принятые во BHHMiattHe при экспертизу
1. Кулешов В. С. , Лакота Н. А. Динамика систем управления манипуляторами. М., Энергия, 1971, с. 20, рис, В-7.
2, Патент США Ng 3.628.674, кл. 214-1, 1971.
0ut.4.
Фиг.а.
А-А
8
//////////////////////////////////////
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1976 |
|
SU603577A1 |
| Промышленный робот | 1977 |
|
SU808262A1 |
| Промышленный робот | 1982 |
|
SU1108005A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Манипулятор | 1983 |
|
SU1096096A1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1982 |
|
SU1166989A1 |
| Переключатель | 1976 |
|
SU633007A1 |