Изобретение относится к робототехнике, точнее к приводам манипуляторов с внешними магнитными системами, установленными на региональных степенях подвижности.
Известны устройства для захвата и перемещения материалов - манипуляторы, содержащие руку со схватом, которая в различной комбинации соединена с подвижными частями приводов, при этом неподвижные части приводов установлены на охватывающем руку корпусе [1, 2, 3, 4, 5].
Недостатком подобных устройств является низкий коэффициент сервиса, поскольку зона обслуживания представляет собой конус, вершина которого находится в районе схвата находящегося в нейтральном положении, а угол раствора вершины конуса не превышает 30-40°. В этой ситуации поворот предмета манипулирования на 180° практически невозможен.
Наиболее близким к заявленному по совокупности существенных признаков является устройство для захвата и перемещения ферромагнитных материалов [6], содержащее трубопровод, конический заборник и охватывающую трубопровод электромагнитную систему, при этом с целью обеспечения надежности захвата устройство снабжено втулкой, состоящей из двух аксиально расположенных частей - магнитной и немагнитной, трубопровод выполнен из двух подпружиненных одна относительно другой частей - неподвижной и подвижной, причем подвижная часть расположена внутри втулки и жестко связана с ней, конический заборник установлен на подвижной части, а электромагнитная система выполнена в виде электромагнита, обмотка которого расположена на заборнике цилиндрического электромагнита, охватывающего втулку, и разъемной трубы - магнитопровода, охватывающей неподвижную часть трубопровода, вдоль которой размещены секции обмоток, отделенные одна от другой ферромагнитными кольцами, а рабочая часть заборника выполнена из упругоэластичного материала.
Недостатком данного устройства является то, что поскольку оно предназначено для непрерывного перемещения ферромагнитного материала, входное отверстие трубопровода установлено неподвижно и не может быть использовано для захвата дискретных заготовок. Кроме того, данное устройство нельзя применять с неферромагнитными заготовками.
Изобретение направлено на устранение указанных недостатков, увеличение зоны обслуживания, повышение производительности.
Это достигается тем, что в устройстве для захвата и перемещения материалов, содержащем руку со схватом, связанную с подвижными частями приводов, неподвижные части которых установлены на охватывающем руку корпусе, рука выполнена в виде трубы, при этом согласно изобретению на одном торце трубы на внешней стороне установлен схват, а в зоне другого торца трубы установлена технологическая тара.
Достижение технического результата обусловлено возможностью перемещения объекта манипулирования по внутренней поверхности трубы.
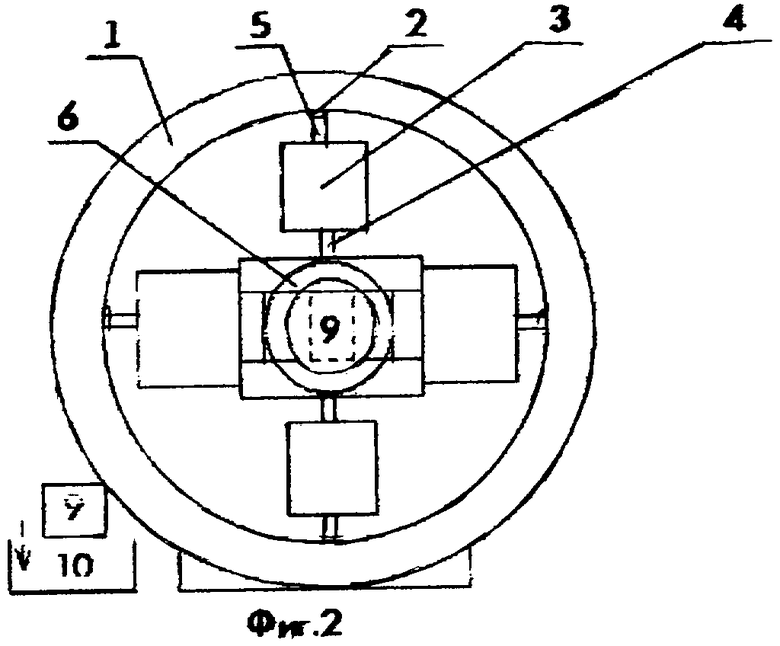
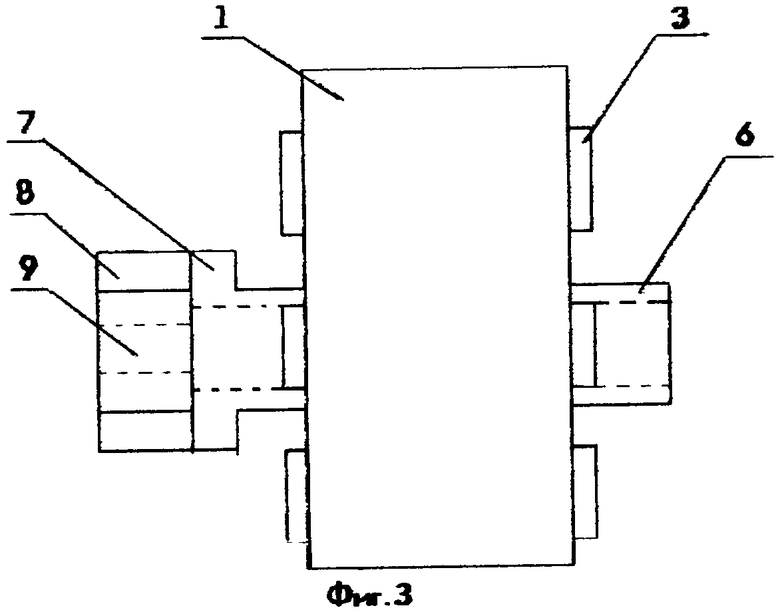
Сущность изобретения иллюстрируется чертежом где на фиг.1 показано заявленное устройство вид сбоку в разрезе, на фиг.2 - вид спереди, на фиг.3 - вид сверху.
Устройство для захвата и перемещения материалов содержит корпус 1, передние универсальные шарниры 2 (внешние), связывающие привод 3 с корпусом 1, передние универсальные шарниры 4, связывающие привод 3 с рукой (внутренние), задние универсальные шарниры 5, руку (трубу) 6, привод схвата 7, губки схвата 8, предмет манипулирования 9 и технологическую тару 10.
Устройство работает следующим образом, захват предмета 9 осуществляется губками 8 под действием усилий, развиваемых приводом 7, например пневмоцилиндром. Захваченному предмету манипулирования вместе с рукой 6 с помощью приводов 3, например электромагнитов, передается ориентация, показанная на фиг.1 пунктиром, затем происходит разжатие губок 8, и предмет манипулирования 9 под действием гравитационных сил перемещается в технологическую тару 10. После этого цикл работы повторяется.
Преимуществом данного устройства является то, что отсутствует необходимость в развороте руки на 180°, что в свою очередь упрощает и удешевляет конструкцию устройства, повышает его надежность.
Источники информации
1. А.С. СССР №1495113 - Манипулятор /А.М.Литвиненко/ - опубл. 23.07.89 Бюл. №27, З-к 4328716/31-08 от 17.11.87. МКИ4 В 25 J 11/00.
2. А.С. СССР №1269990 - Манипулятор /А.М.Литвиненко/ - опубл. 15.11.86 Бюл. №42, З-к 3802951/25-08 от 16.10.84. МКИ4 В 25 J 1/00.
3. А.С. СССР №1530433 - Манипулятор /А.М.Литвиненко/ - опубл. 23.12.89. Бюл. №47, З-к 4172369/31-08 от 30.12.86. МКИ4 В 25 J 11/00, 9/12.
4. А.С. СССР №1445941 - Манипулятор /А.М.Литвиненко/ - опубл. 23.12.88 Бюл. №47, З-к 4187646/31-08 от 28.01.87. МКИ4 В 25 J 1/00.
5. А.С. СССР №1465297 - Манипулятор /А.М.Литвиненко/ - опубл. 15.03.86 Бюл. № 10, З-к 4162129/31-08 от 16.12.86. МКИ4 В 25 J 1/00.
6. А.С. СССР №1066779 - Устройство для захвата и перемещения ферромагнитных материалов /В.П.Шендерей/ - опубл. 15.01.84 Бюл. №2, З-к 3507045/25-08 от 28.10.82. МКИ В 23 Q 11/02.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Манипулятор | 1977 |
|
SU707792A1 |
| Манипулятор | 1989 |
|
SU1613318A1 |
Изобретение относится к робототехнике, точнее к приводам манипуляторов с внешними магнитными системами, установленными на региональных степенях подвижности. Устройство для захвата и перемещения предметов содержит корпус, руку со схватом, выполненную в виде трубы, приводы, неподвижные части которых установлены на охватывающем трубу корпусе, а подвижные части связаны с трубой. Схват установлен на внешней стороне одного торца трубы из условия перемещения предмета по внутренней поверхности трубы в технологическую тару, установленную в зоне другого торца трубы. Изобретение позволит упростить и удешевить конструкцию устройства, повысить его надежность за счет отсутствия необходимость в развороте руки на 180°. 3 ил.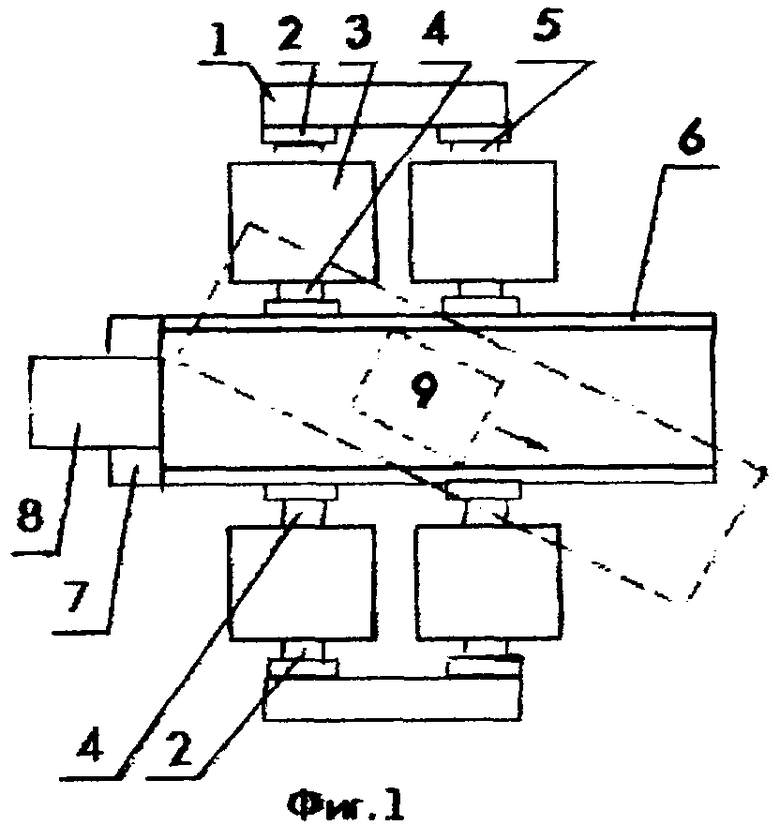
Устройство для захвата и перемещения предметов, содержащее корпус, руку со схватом, выполненную в виде трубы, приводы, неподвижные части которых установлены на охватывающем трубу корпусе, а подвижные части связаны с трубой, отличающееся тем, что схват установлен на внешней стороне одного торца трубы из условия перемещения предмета по внутренней поверхности трубы в технологическую тару, установленную в зоне другого торца трубы.
| Промышленный робот | 1982 |
|
SU1047679A1 |
| Манипулятор | 1986 |
|
SU1344597A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

