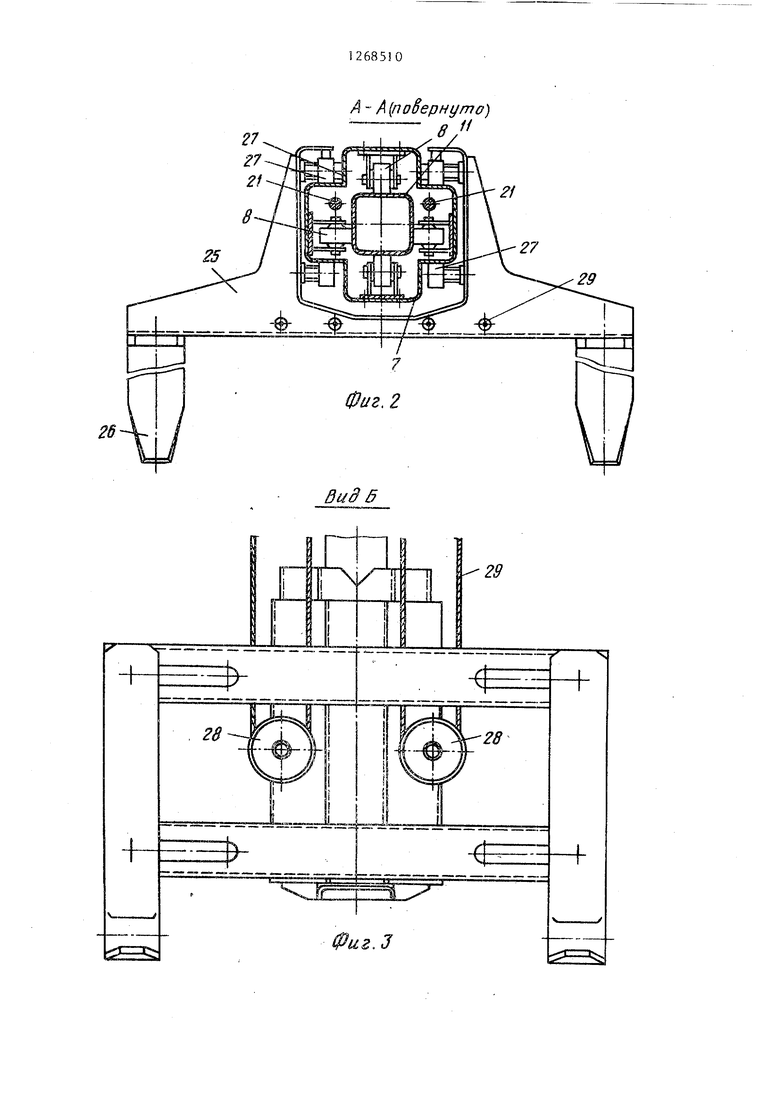
Изобретение относится к подъемнотранспортной технике, в частности к колоннам мостовых краноп-итабелеров. Цель изобретения - снижение метал лоемкости. На фиг.1 схематично изображена те лескопическая колонна, вид сбоку (подвижные средняя и нижняя секции показаны в крайнем нижнем положении контурными линиями, а в крайних верх них положениях - тонкими линиями); на фиг.2 - разрез А-А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.А средняя подвижная секция; на фиг.З вид В на фиг.4; на фиг.6 - разрез Г-Г на фиг.5. Телескопическая колонна закреплена на поворотной опоре тележки 1 с возможностью перемещения вдоль моста 2, опирающегося на рельсы 3 для перемещения крана-штаб.елера с грузом вдоль склада. Телескопическая колонна содержит неподвижную секцию 4, подвижную секцию 5 и каретку 6, причем неподвижная секция 4 состоит из четырех швеллеров 7, образующих внутреннюю направляющую, в нижней части которой размещены четыре опорных ка ка 8. Швеллер 7 выполнен с выступом 9 на конце и пазом 10 внутри шве лера 7, Подвижная секция 5 состоит и полого стержня 11, образующего среднюю и верхнюю части секции, приварен ных к нему двух ребер 12 и четырех швеллеров 13 того же типоразмера, вы полняющих функцию направляющих для каретки 6 в нижней части секции 5, что и швеллеры 7 четырех осей 14, не сущих на себе катки 15, и трех стоек 16. В состав секции 5 входят два дублируюпщх друг друга устройства, каждое из которых состоит из фиксирующего ролика 17, осей 18 и 19 двуплечего 20, тяги 21, замка 2 и осей 23 и 24. Замок 22 выполнен в виде двуплечего рычага, имеющего центральное отверстие для поворота на оси 23, паз с одной стороны и от верстие под ось 24 - с другой. Каре ка 6 состоит из корпуса 25, вил 26, опорных катков 27 и двух обводных блоков 28 под канат 29, который сое динен с барабаном механизма подъема (не показан). Телескопическая колонна работает следующим образом. Груз, установленный на вилы 26, следовательно, и каретка 6 опускают 02 ся механизмом подъема через обводные блоки 28 канатом 29. При этом два нижних опорных катка 27 нижней каретки 6 упираются в стенки паза замков 22 (фиг.4), поворачивают их, через тяги 21 и двуплечие рычаги 20 выводят фиксирующие ролики 17 из пазов 10, и они начинают перекатываться, по внутренней стенке неподвижной секции 4, т.е. происходит совместное перемещение по вертикали секции 5 и каретки 6. Это достигается тем что опорные катки 27, оказавшись запертыми в пазах замков 22, не позволяют секции 5 сдвигаться под действием своей массы со скоростью, отличной от скорости каретки 6. В таком спаренном виде осуществляется доставка каретки 6 с грузом в крайнее нижнее положение. Перемещение и ориентирование каретки 6 на неподвижной секции 4 и секции 5 происходит при помощи установленных взаимно перпендикулярно .опорных катков 27, катящихся по беговым дорошсам швеллеров 7 и 13. Перемещение и ориентирование подвижной секции 5 во внутренних направляющих неподвижной секции 4 осуществляется по стационарным каткам 8, расположенным в нижней части неподвижной секции 4,и каткам 15, принадлежащим самой секции 5 и катящимся по внутренним беговым дорожкам швеллеров 7 неподвижной секции 4. При подъеме каретки 6 и секции 5 фиксирующие ролики 17, находясь под нагрузкой от действия массы секции 5, принудительно вдавливаются в паз 10, что вызьшает сдвиг двуплечих рычагов 20 в направлении против часовой стрелки, смещение вниз тяг 21 и, как следствие последующего поворота замков 22 - выход катков 27 из пазов указанных замков 22, где перед этим они были заперты,. При дальнейшем движении каретки 6 вверх, осуществляемом приводом подъема,происходит отставание секции 5, поскольку между ними произошло разъединение, сопровождаемое дальнейшим проворачиванием замков 22 опорными катками 27 до полного их выхода из паза замков 22. Этому положению замков 22 соответствует положение мертвой точки фиксирующих роликов 17 и рычагов 20 по отношению к опорной поверхности пазов 10, что и приводит к зависанию секции 5 на фиксирующих роликах 17 31 в неподвижной секции 4. Сохранению стабильности этого положения способствует масса секции 5, передаваемая фиксирующими роликами 17 на опорную поверхность паза 10 и предотвращающая случайное отклонение фиксирующих роликов 17 и рычагов 20 от положения мертвой точки. Моменту прихода рычагов 20 и фиксирующих роликов 17 в положение мертвой точки соответ.ствует заход выступов 9 в Соответствующие пазы 30 секций 5 и плотному их прилеганию. Это необходимо для ликвидации зазоров при стыковке средней 5 и неподвижной 4 секций, получения его монолитности исключающем раскачивание при повороте секции 5 и каретки 6 с грузом .и соответствующие этому нежелательнью шуМОвые эффекты. Формула изобретения Телескопическая колонна кранаштабелера, содержащая неподвижную 104. секцию с направляющими для подвижной секции, на нижней части которой смонтированы одни из участков направляющих для подъемно-опускной каретки с грузозахватом, и механизм фиксации подвижной секции, включающий размещенные в вертикальной плоскости и связанные между собой вертикальной тягой двуплечие рычаги, на верхнем из которых закреплен ролик для захода в выполненный в неподвижной секции паз, отличающаяся тем,что, с целью снижения металлоемкости, направляющие на неподвижной секции смонтированы внутри нее с возможностью размещения в них верхней и средней частей подвижной секции, другая часть направляющих для каретки с грузозахватом смонтирована на наружной поверхности неподвижной секции с возможностью стыковки с направляющими для этой каретки на нижней части подвижной секции, а нижние двуплечие рычаги механизма фиксации выполнены с пазами для катков каретки с грузозахватом.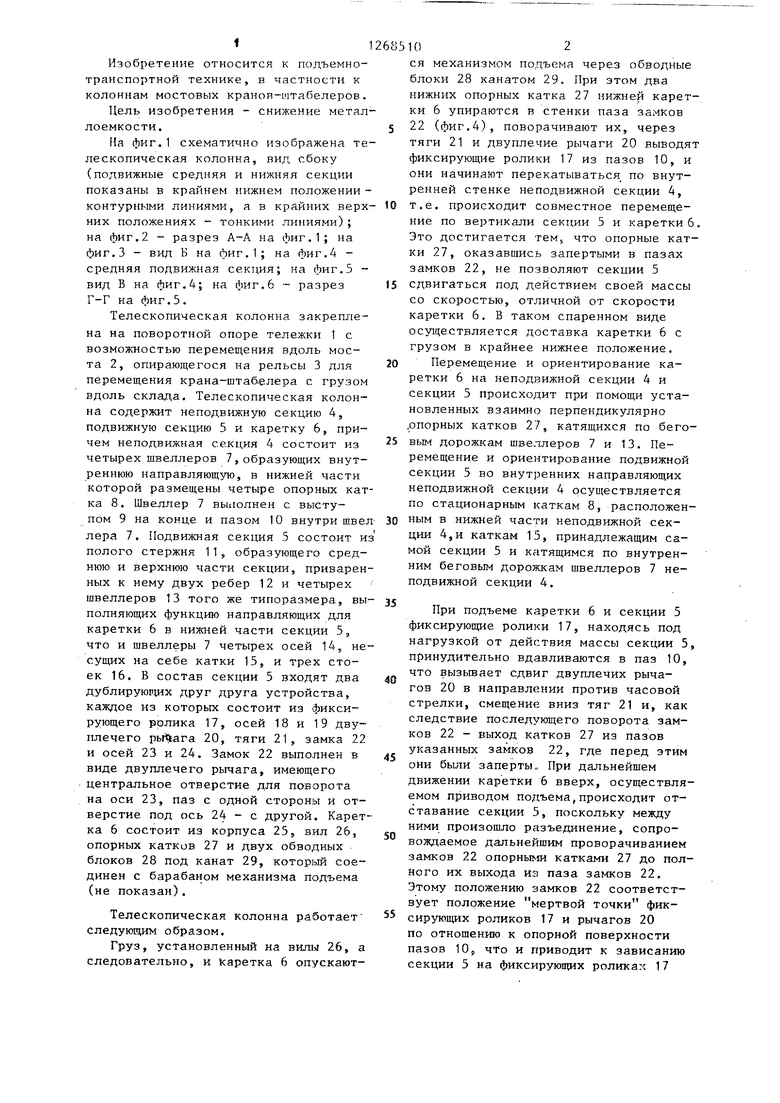

| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопическая колонна | 1977 |
|
SU727543A1 |
| КРАН-ШТАБЕЛЕР | 1969 |
|
SU251794A1 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| Консольный кран | 1980 |
|
SU954360A1 |
| Опрокидыватель для легковых автомобилей | 1987 |
|
SU1532537A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU929284A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| Телескопический грузозахват стеллажного крана-штабелера | 1986 |
|
SU1382768A1 |
| Установка для фиксации и подачи овец на обработку | 1988 |
|
SU1664216A1 |

Изобретение относится к подъемно-транспортной технике. Цель изоб.ретения - снижение металлоемкости телескопической колонНы крана-штабелера.Колонна содержит неподвижную секцию 4 с внутренними направляющими,в нижней части которых размещены катки 8 для размещения внутри неподвижной секции 4 верхней и средней частей подвижной секции 5. На наружных поверхностях секции и нижней части секции 5 G возможностью стыковки смонтированы направляющие в виде швеллеров 7 и 13 для каретки 6 с грузозахватом. Механизм фиксации 5 содержит двуплечие рычаги 20 и связанные с ними посредством вертикальных тяг 21 двуплечие рычаги замков 22, первые из которых имеют ролики для размещения в пазах 10 секции 4, а вторые выполнены с пазами под катки 27 каретки 6. При опускании каретки 6 катки 27 упираются в стенки пазов замков 22, поворачивают их и через тяги 21 и двуплечие рычаги 20 вывод5 т ролики 17 из пазов 10 и они перекатываются по внутренней стенке секций 4, что приводит к совместному перемещению секции 5 и каретки 6, поскольку катки 27 оказываются запертыми в пазах двуплечих рычагов замков 22. Размещение верхней и средней частей секции 5 внутри секции 4 с возможностью перемещения каретки 6 по указанным секциям позволяет снизить металлоемкость колонны. 6 ил. 20 (Л с: fPuzA
ВиЗ б А -
29
Ч/
,- /((noSepHymo} - 8
Зз:
| Способ изготовления кабельной стеклонити-стеклоленты | 1949 |
|
SU91777A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
