версой 3. По стойкам с помощью трособлочной системы перемещаются ползуны 7, к которым шарнирно присоединены жесткие тяги 15, с другими концами которых шарнирно соединены захваты 16, перемещае1 ые на осях 17 по пазам. Нижние блоки трособлочной системы установлены на ползунах с возможностью поворота в двух взаимоперпендикулярных направлениях. После установки устройства на ряд труб производится подъем основной лебедки, соединенной с тросами 12, что перемещает ползуны вверх, поворачивает связанные с ними тягами захваты и перемещает их к центру устройства, зацепляя трубы с торцов. В случае несимметричного расположения труб происходит зацепление наиболее удаленных от центра концов труб и смещение их к центру устройства до тех пор, пока все захваты с обеих сторон устройства не войдут в зацепление с грузом. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для труб Максимова | 1986 |
|
SU1414750A2 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Грузозахватное устройство | 1986 |
|
SU1439067A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Устройство для обслуживания светильников в промышленных зданиях | 1989 |
|
SU1710487A1 |
| Устройство для трелевки и погрузки деревьев | 1977 |
|
SU691370A1 |
| СТЕНД ДЛЯ МОНТАЖА И ДЕМОНТАЖА ШИНЫ КОЛЕСА И ТЕЛЕЖКА ДЛЯ ПЕРЕДВИЖЕНИЯ КОЛЕСА | 2007 |
|
RU2340464C2 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Машина для укладки сборно-разборных дорожных покрытий | 1984 |
|
SU1201391A1 |
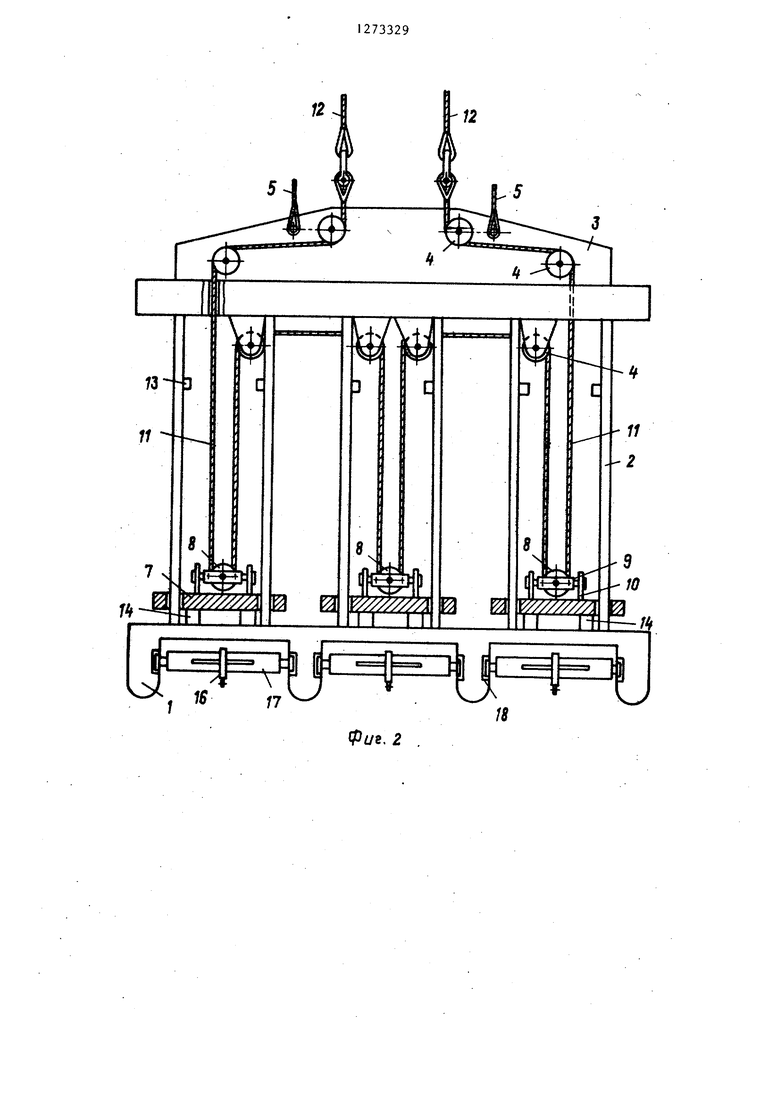

Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения состоит в повьшении надежности. Устройство содержит раму 1 с направляющими стойками 2 и траО) ю со со го
Изобретение относится к подъемнотранспортному оборудованию и может быть использовано для подъема полых длинномерных изделий, например труб, предназначено: преимущественно для погрузки, разгрузки и щтабелирования одновременно ряда труб различной длины и одного диаметра в грейферном режиме.
Цель изобретения - повьшение надежности.
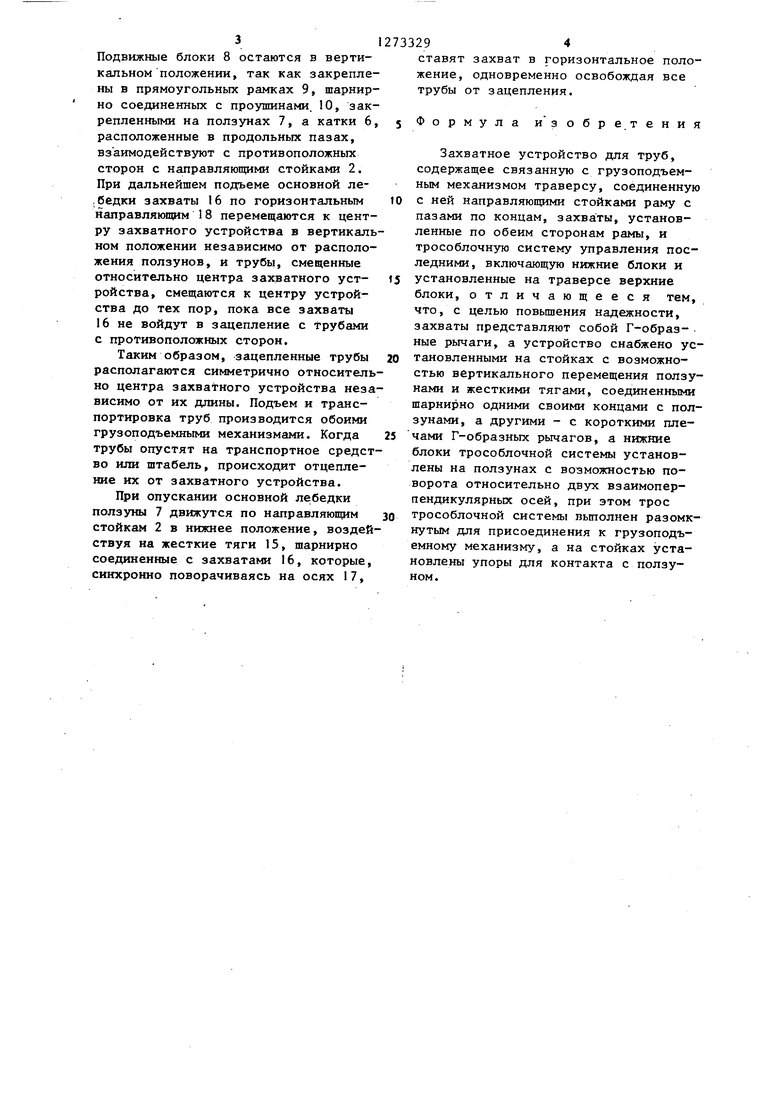
На фиг.1 изображено захватное устройство, вид спереди ; на фиг.2 - то же, вид сбоку; на г.З - то же, вид сверху (с трубами).
Захватное устройство содержит прямоугольную многосекционную раму 1 , в центральной части которой установлены направляющие стойки 2. На стойках 2 закреплена прямоугольная траверса 3 с закрепленными на ней неподвижными блоками 4. Траверса 3 соединена с вспомогательной лебедкой тросами 5 двухлебедочной грузоподъемной мазаины. На направляющих стойках 2 посредством катков 6, расположенных в продольных пазах, установлены ползуны 7 с закрепленными на них подвижными блоками 8, установленными в прямоугольньпс рамках 9, шарнирно соединенных с проушинами 10, закрепленными на ползунах 7. Подвижные 8 и неподвижные 4 блоки последовательно огибает гибкий элемент 11 независимого управления захватами, сочлененный с тросами 12 основной лебедки.
Ползуны 7, взаимодействующие в верхнем положении с упорами 13, ус .тановленными на направляющих стойках 2 с противоположных сторон, и в нижнем положении - с опорными выступами 14, щарнирно соединены с жесткими тягами 15, другие концы которых также шарнирно соединены с плечами захватов 16, выполненных в виде Г-образных рычагов, закрепленных на осях 17 с возможностью возвратнопоступательного движения в горизонтальных направляющих 18, расположен ных с противоположных сторон в каждой секции рамы 1.
Захватное устройство работает следующим образом.
в свободном состоянии захватное устройство соединено тросами 5 вспомогательной лебедки с траверсой 3. Ползуны 7 с подвижными блоками 8 расположены в нижней части стоек 2 и
взаимодействуют с опорными выступами 14, а рабочие органы захватов 16 находятся в горизонтальном положении и выступают за пределы рамы. В таком состоянии захватное устройство готово к работе.
При установке захватного устройства на ряд труб производится подъем основной лебедки, сочлененной тросами 1 2 с гибким элементом 11. Усилие
грузоподъемной машины через непод ганые 4 и подвижные 8 блоки, соединенные с ползунами 7, передается на жесткие тяги 15, шарнирно соединенные с короткими плечами захватов 16,
которые поворачиваются на оси 17, устанавливаясь в вертикальное положение. При этом происходит зацепление наиболее удаленных от центра захватного устройства торцовых кромок труб.
Подвижные блоки 8 остаются в вертикальном положении, так как закреплены в прямоугольных рамках 9, шарнирно соединенных с проушинами. 10, закрепленными на ползунах 7, а катки 6, расположенные в продольных пазах, взаимодействуют с противоположных сторон с направляющими стойками 2. При дгшьнейшем подъеме основной ле,бедки захваты 16 по горизонтальным направляющим 18 перемещаются к центру захватного устройства в вертикальном положении независимо от расположения ползунов, и трубы, смещенные относительно центра захватного устройства, смещаются к центру устройства до тех пор, пока все захваты 16 не войдут в зацепление с трубами с противоположных сторон.
Таким образом, зацепленные трубы располагаются симметрично относительно центра захватного устройства независимо от их длины. Подъем и транспортировка труб производится обоими грузоподъемными механизмами. Когда трубы опустят на транспортное средство или штабель, происходит отцепление их от захватного устройства.
При опускании основной лебедки ползуны 7 движутся по направляющим стойкам 2 в нижнее положение, воздействуя на жесткие тяги 15, шарнирно соединенные с захватами 16, которые, синхронно поворачиваясь на осях 17,
ставят захват в горизонтальное положение, одновременно освобождая все трубы от зацепления.
Формула изобретения
Захватное устройство для труб, содержащее связаннзто с грузоподъемным механизмом траверсу, соединенную с ней направляющими стойками раму с пазами по концам, захваты, установленные по обеим сторонам рамы, и трособлочную систему управления последними, включающую нижние блоки и установленные на траверсе верхние блоки, отличающееся тем, что, с целью повышения надежности, захваты представляют собой Г-образные рычаги, а устройство снабжено установленными на стойках с возможностью вертикального перемещения ползунами и жесткими тягами, соединенными шарнирно одними своими концами с ползунами, а другими - с короткими плечами Г-образных рычагов, а нижние блоки трособлочной системы установлены на ползунах с возможностью поворота относительно двух взаимопераендикулярных осей, при этом трос трособлочной системы выполнен разомкнутым для присоединения к грузоподъемному механизму, а на стойках установлены упоры для контакта с ползуном.
12
3
11 12
-
-Г/ -2
Iff
JS
Фиг.5
| Захватное устройство для труб | 1982 |
|
SU1178680A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
