Пневматические автооператоры с поворотной и прямолинейно перемещающейся «механической рукой для подачи обрабатываемого кольца из магазина в патрон, известны.
Описываемый пневматический автооператор указанного типа применен, в частности, для подачи наружного подшипникового кольца из магазина в мембранный патрон желобошлифовального станка с качающейся бабкой изделия. Такое использование известного автооператора в сочетании с оправкой для захвата и установки наружного подшипникового кольца в патроне обеспечивает положительный технический эффект, выражающийся, в частности, в том, что достигается самоустанавливаемость кольца по зажимным винтам мембраны патрона.
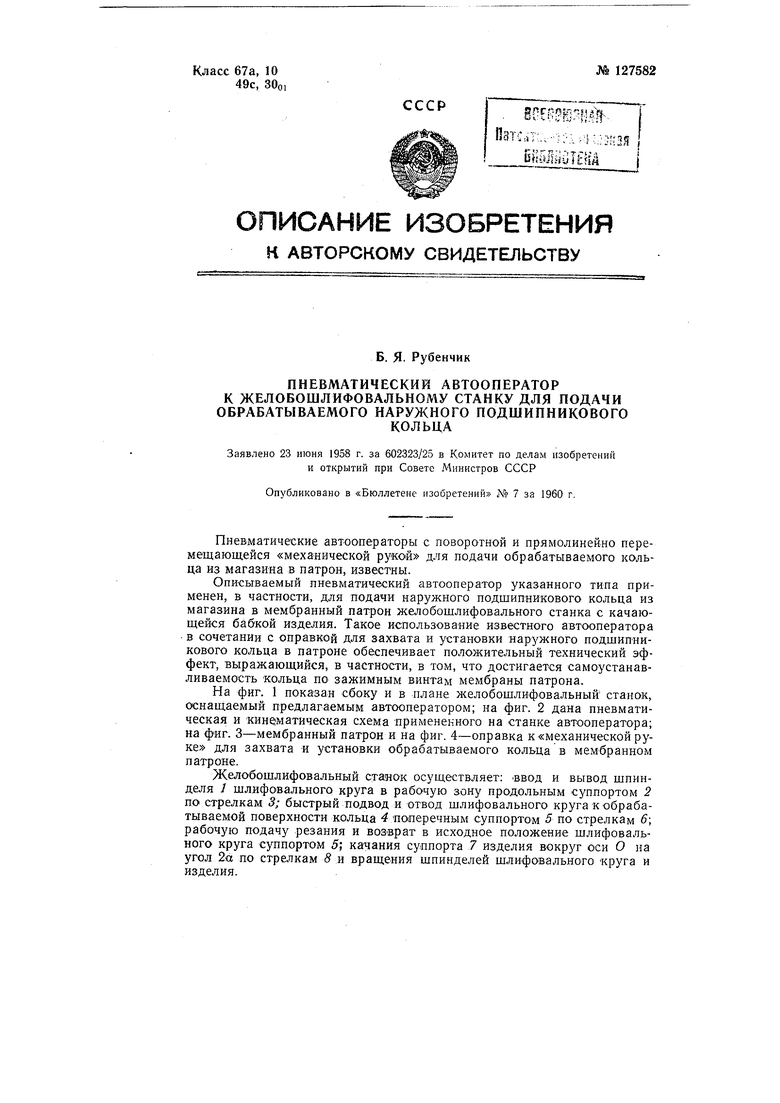
На фиг. 1 показан сбоку и в плане желобошлифовальный станок, оснащаемый предлагаемым автооператором; на фиг. 2 дана пневматическая и кинегматическая схема примененного на станке автооператора; на фиг. 3-мембранный патрон и на фиг. 4-оправка к «механической руке для захвата и установки обрабатываемого кольца в мембранном патроне.
Желобошлифовальный станок осуществляет: ввод и вывод шпинделя 1 шлифовального круга в рабочую зону продольным суппортом 2 по стрелкам 3; быстрый подвод и отвод шлифовального круга к обрабатываемой поверхности кольца 4 полеречным суппортом 5 по стрелкам 6; рабочую подачу резания и возврат в исходное положение шлифовального круга суппортом 5; качания суппорта 7 изделия вокруг оси О на угол 2а по стрелкам 8 и вращения шпинделей шлифовального круга и изделия.
№ 127582
Для создания автоматического цикла работы желобошлифовального станка использован пневматический автооператор.
Воздух из сети поступает к крану 9, двухходовому клапану 10 и ручному крану 11.
При достижении требуемого размера на шлифуемой поверхности кольца 4, мерительная головка 12 дает команду на выход суппортов 2 и 5 по стрелкам 6 и 5 в нерабочее положение.
При выходе суппорта 2 упор 13 открывает кран 9. Воздух поступает в цилиндр 14 вывода мерительной голов-ки 12 через одноходовой клапан 15- После вывода головки 12 воздух из путевого клапана 16 поступает через одноходовой клапан 17 в цилиндр 18 разжима мембранного патрона/9 и цилиндр Ж Мембранный патрон 9 разжимается, и пружиной 21 через выталкиватель 22 кольцо 4 выбрасывается из патрона 19 в желоб. При ходе цилиндра 20 болт 23 нажимает на шток «лалана 10, который направляет воздух в цилиндр 24, в результате чего «механическая рука 25 подает необработанное кольцо в мембранный патрон. Положением болта 23 регулируют время выдержки между моментом выталкивания обработанного кольца 4 из мембранного патрона и постановкой другого, необработанного , кольца. В конце пути «механической руки 25 при постановке кольца в патрон срабатывает электроконтакт 26 и включает электромагнит клапана 17, который закрывает поступление воздуха и соединяет цилиндры 18 к 20 с атмосферой, в результате чего зажимается кольцо в мембранном патроне.
Пружины 27 и 28 возвращают цилиндр 20 и клапан 10 в исходное положение: воздух идет в нижнюю часть цилиндра 24, «механическая рука 25 возвращается в магазин и захватывает следующее необработанное кольцо.
В этом Положении срабатывает электроконтакт 29, и включается электромагнит клапана 15, который закрывает воздух из сети и соединяет рабочую зону цилиндра 14 с атмосферой, в результате чего пружиной 30 мерительная головка 12 вводится в рабочее положение.
Одновременно с этим электроконтакт 3} включает электродвигатель суппорта, и шлифовальный круг идет в рабочее положение. При этом упор 52 закрывает кран 9 и упор 33 отключает электропитание электромагнитов клапанов 17 и /5. Автооператор подготовлен к новому циклу работы.
При достижении требуемого размера на отшлифованном кольце мерительная головка 12 дает команду суппорту шпинделя шлифовального круга, выйти в нерабочее положение. Цикл повторяется. Как указывалось, При поступлении сжатого воздуха в цилиндр 18 мембрана 34 через шток 35 разжимается. Выталкиватель 22 под действием пружины 21 удаляет обработанное кольцо из патрона. «Механическая рука 25 устанавливает необработанное кольцо 4, и оно зажимается мембраной 34.
Для захвата кольца 4 -и установки его в мембранный патрон 19 «механическая рука 25 имеет оправку, состояш,ую из корпуса 36, в пазах, которого расположены три подпружиненных шарика 37 под углом 120° один к другому и осевые подпружиненные штифты 38Фланец 39 удерживает шарики 37 и штифты 38 в крайних положениях. Этот фланец но размеру наружной цилиндрической поверхности меньше размера внутренней цилиндрической поверхности кольца 4 на один миллиметр. Таким образом, насаженное на оправку кольцо может полностью самоустанавливаться по зажимным винтам 40 мембраны 34 и осевым упорам 41.
При постановке кольца в мембранный патрон торец 42 оправки отодвигает выталкиватель 22 от торца устанавливаемого -кольца 4 через штифты 43, закрепленные на крестовине 44 выталкивателя 22.
При дальнейшем ходе «механической руки 25 с оправкой осевые штифты 38 эластично поджимают кольцо к осевым упорам 41 мембранного Патрона.
Ход «механической руки регулируется таким образом, чтобы осевые штифты 38 не полностью использовали свой ход. После зажима кольца мембранным патроном оправка возвращается в магазин. Таким образом, правильная установка колец в мембранном патроне достигается в результате полной самоустанавливаемости колец по отношению к зажимным винтам 40 и осевым упорам 41 мембранного патроиа.
Предмет изобретения
1.Применение пневматического автооператора с поворотной и прямолинейно перемещаюш;ейся «механической рукой для подачи обрабатываемого наружного подшипникового кольца из магазина в мембранный патрон желобошлифовального станка с качающейся бабкой изделия.
2.Оправка к «механической руке по п. 1 для захвата и установки обрабатываемого кольца в мембранном патроне, отличающаяся тем, что, с целью достижения самоустанавливаемости кольца по зажимным винтам мембраны патрона, в ней применены опорные для кольца подпружиненные шарики и, служащие для эластичного прижима кольца к осевым упорам патрона, осевые подпружиненные штифты.
- 3 -№ 127582