2. Устройство по п. 1, о т л и чающееся тем, что блок контроля очередности срабатывания датчиков содержит элемент ИЛИ, входами подключенный к выходам первого и второго элементов И, пять элементов ИЛИ-НЕ, причем первый, второй, третий и четвертый элементы ИЛИ-НЕ соединены последовательно, выход четвертого элемента ИЛИ-НЕ соединен с первым входом второго элемента И и с вторым входом третьего элемента ИЛИ-НЕ, выход которого подключен к
первому входу первого элемента И, вторым входом соединенный через пятый элемент ИЛИ-НЕ с третьим входом блока контроля очередности срабатывания датчиков и с вторым входом второго элемента И, второй вход четвертого элемента ИЛИ-НЕ соединен с выходом первого элемента ИЛИ-НЕ, а второй вход второго элемента ИЛИ-НЕ с соответствующим первым .входом данного блока, второй вход которого соединен с входом первого элемента ИЛИ-НЕ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| Многоканальное устройство для управления позиционированием | 1984 |
|
SU1242917A1 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для автоматического адресования транспортных средств | 1983 |
|
SU1089586A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |
| Устройство для автоматического адресования транспортных средств | 1982 |
|
SU1027737A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
1. УСТРОЙСТЮ ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ КРАНОМ-ШТАБЕЛЕРОМ, содержащее датчик обратной связи я последовательно соединенные задатчик адреса, блок записи адреса позиции, блок сравнения и блок управления исполнительными меха Низмами, выходы датчика через элемент ИЛИ подключены к первым входам блока определения текущего адреса, первый выход которого соединен с вторым входом блока сравнения, о тличающееся тем, что, с целью повышения надежности в эксплуатации устройства, в него введены цифровой индикатор и блок контроля очередности срабатывания датчиков, подключенный первыми входами к выходам датчика обратной связи, вторым входом - к втоЕюму выходу блока определения текущего адреса, а выходом - к второму входу блока управления исполнительными механизмами, при этом блок определения текущего адреса выполнен в виде реверсивного счетчика, блок записи заданной адресной позиции выполнен в виде ре(Я гистра, к выходу которого подключен цифровой индикатор, а датчик обратной связи выполнен в виде двух датчиков фиксирования прохождения четной и нечетной позиции. о ел о со
1
Изобретение относится к автоматик и может быть использовано при автоматизации подъемно-транспортных операций на складах различных отраслей промьииленности.
Известно устройство, решающее задачу программного управления подъемно-транспортными механизмами, построение на счетно-импульсном принципе поиска заданной адресной позиции.
Алгоритм работыизвестного устройства заключается в том, что адрес заданной позиции сравнивается с текущим положением подъемно-транспортного механизма, результат этого сравнения определяет направление движения и режимы включения приводов механизма. Текущий адрес по одной координате определяется с помощью одного датчика счета позиций. Обычно для этой цели используется бескон тактный датчик, установленный на самом подъемно-транспортном механизме и реагирующий при движении на специальные шунты (металлические пластины), установленные на каждой позиции С13.
Точная остановка транспортного средства по заданному адресу, исключающая возможность возникновения аварийной ситуации (например, ДЕИжение загруженного грузовахвата крана-штабелера в занятую ячейку стеллажей }f в значительной степени определяется безсмиибочным вводом адреса в блок записи заданной адресной позиции и отсутствием сбоев при определении текущей координаты транспортного механизма. Такие сбои неизбежны в известных устройствах при ложном срабатывании или, наоборот, несрабатывании датчика счета позиций при наезде на очередной шунт. Контроль за правильностью ввода адреса в устройство отсутствует.
Наиболее близким к предлагаемому является устройство для автоматического адресования транспортного средства, содержащее задатчик адреса, соединенный с блоком записи заданной адресной позиции, в качестве которого используется счетчик, блок памяти исходной адресной позиции, блок сравнения, информационными входами соединенный, с выходами блоков записи и памяти, а по выходу связанный с блоком управления исполнительными механизмами.
Устройство содержит два элемента И, одни входы KOTOfajx подключены к датчику обратной связи, а другие входы к выходам Назад и Вперед блока сравнения. Выходы элементов И соединены соответственно со счетными входами блоков записи .заданной адресной позиции и памяти исходной адресной позиции. В зависимости от того больше или меньше число, установленное на задатчике адреса, номера адресной позиции, у которой находится кран-штабелер, датчик подключается к счетному входу или блока записи заданной адресной позиции, или блока памяти исходной адресной позиции. В остальном работа устройства аналогична работе других известных устройств, использующих счетноимпульсный принцип С2.
К недостаткам устройства относится низкая надежность его в эксплуатации, вызванная возможностью сбоев при определении текущей координаты при любом числе ложных срабатываний или .несрабатываний датчика. Отсутствует какая-либо проверка числа, вводимого оператором в устройство, с тем числом, которое непосредственн сравнивается с текущим адресом транспортного средства.
Нецелесообразным также является использование в качестве блока записи заданной адресной позиции счетчика, конструктивно более сложного и, следовательно, менее надежного, чем, например, регистр.
Цель изобретения - повышение, надежности устройства в работе.
Поставленная цель достигается тем, что в устройство для программнгчэ управления краном-штабелером, содержащее датчик обратной связи и последовательно соединенные эадатчик адреса, блок записи адреса позиции, блок сравнения и блок управления исполнительными механизмами, выходы датчика через элемент ИЛИ подключены к первым входам блока опреде/ ения т.екущего адреса, первый выход которого соединен со вторым входом блока сравнения, введены цифровой индикатор и блок контроля очередности срабатывания датчиков, подключенный первыми входами к выходам датчика обратной связи, вторым входом - к второму выходу блока определения текущего адреса, а выходом - к второму входу блока управления исполнительными механизмами, при этом блок определения текущего адреса выполнен в виде реверсивного счетчика, блок записи заданной адресной позиции выполнен в виде регистра, к выходу которого подключен цифровой индикатор, а датчик обратной связи выполнен в виде двух датчиков фиксирования прохождения четной и нечетной позиции.
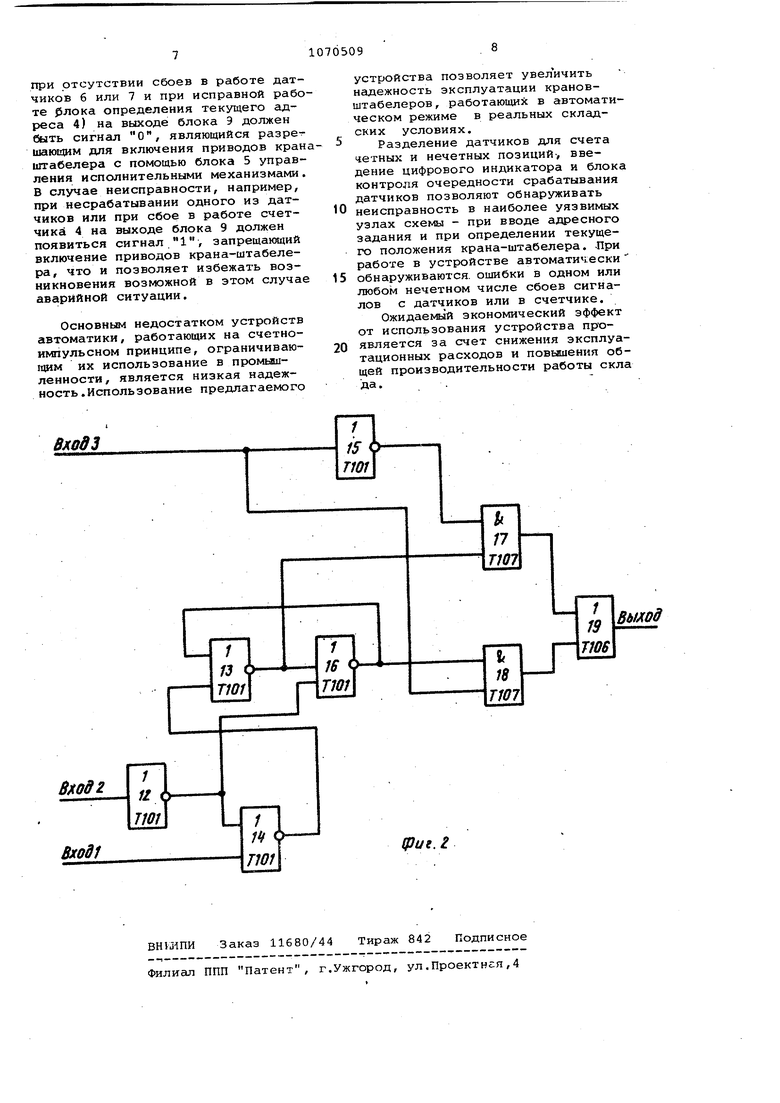
Блок контроля очередности срабатывания датчиков содержит элемент ИЛИ, входами подключенный к выходам первого и второго элементов И пять элементов ИЛИ-НЕ, причем первый. Второй, третий и четвертый элементы ИЛИ-НЕсоединены последователно, выход четвертого элемента ИЛИ-Ц соединен с первым входом второго элмента И и с вторым входом третьего элемента ИЛИ-НЕ, выход которого . подключен к первому входу первого элемента И, вторым входом соединенный через пятый элемент ИЛИ-НЕ с третьим входом блока контроля очередности срабатывания датчиков и с вторым входом второго элемента И, второй вход четвертого элемента ИЛИ-НЕ соединен с выходом первого элемента ИЛИ-НЕ, а .второй вход второго элемента ИЛИ-НЕ - с соответствующим первым входом данного блока,, второй вход которого соединен с входом первого элемента ИЛИ-Н
На фиг. 1 изображена блок-схема предлагаемого устройства для программного управления краном-штабелером; на фиг. 2 - схема блока контроля очередности срабатывания датчиков.
Устройство содержит задатчик 1 адреса, блок 2 записи адреса позиции , блок 3 сравнения, блок 4 определения текущего адреса, блок 5 управления исполнительными механизмами, датчик б, фиксирующий прохождение четной позиции, датчик 1 фиксирующий прохождение нечетной позиции, элемент ИЛИ 8, блок 9 контроля очередности срабатывания датчиков, цифровой индикатор 10 датчик 11 обратной связи. Блок контроля очередности срабатывания дат чиков содержит элементы ИЛИ-НЕ 12 16, элементы И 17, 18 и элемент . ИЛИ 19.
Устройство работает следующим
5образом.
В задатчик 1 адреса заносится адрес ячейки стеллажей, возле которой необходимо произвести остановку крана-штабелера. Ввод задания
0 может осуществляться как автоматически от какого-либо внешнего устройства, так и автономно с пульта оператора, где требуемый адрес набирается в десятичном коде. В за5 датчике 1 адреса введенньй адрес перешифровывается из десятичного кода в двоичный и поступает в блок 2.записи адреса позиции, представ- , ляющий собой запоминающий регистр.
„ С помощью цифрового индикатора 10, подключенного к регистру,оператором осуществляется визуальный контроль за правильностью ввода адреса в устройство.
Текущий адрес, у которого находится в данный момент кран-штабелер, хранится в блоке 4 определения текущего адреса. Блок 4 определения текущего адреса представляет собой реверсивньй счетчик. К
0 началу выполнения очередного задания по новому адресу в блоке 4 хранится число, соответствующее номеру той ячейки, возле которой находится в данный момент кран-штабелер,
5 которое поступает в блок 3 сравнения для определения направления движения. При движении крана-штабелера вдоль стеллажей в результате взаимодействия датчиков 6 и 7 счета
0 позиций с шунтами, расположенными на стеллажах, на счетный вход счетчика 4 через элемент ИЛИ 8 поступают импульсы, которые суммируются или вы-читаются в зависимости от каправ5 ления движения крана, определяемого блоком 3 сравнения, фиксируя таким образом истинное положение кранаштабелег
Текущий и заданный адреса посту0 пают в блок 3 сравнения, выполненный, например, в виде сумматора. Блок 3 выдает результаты сравнения
Впедвух адресов в виде сигнсшов
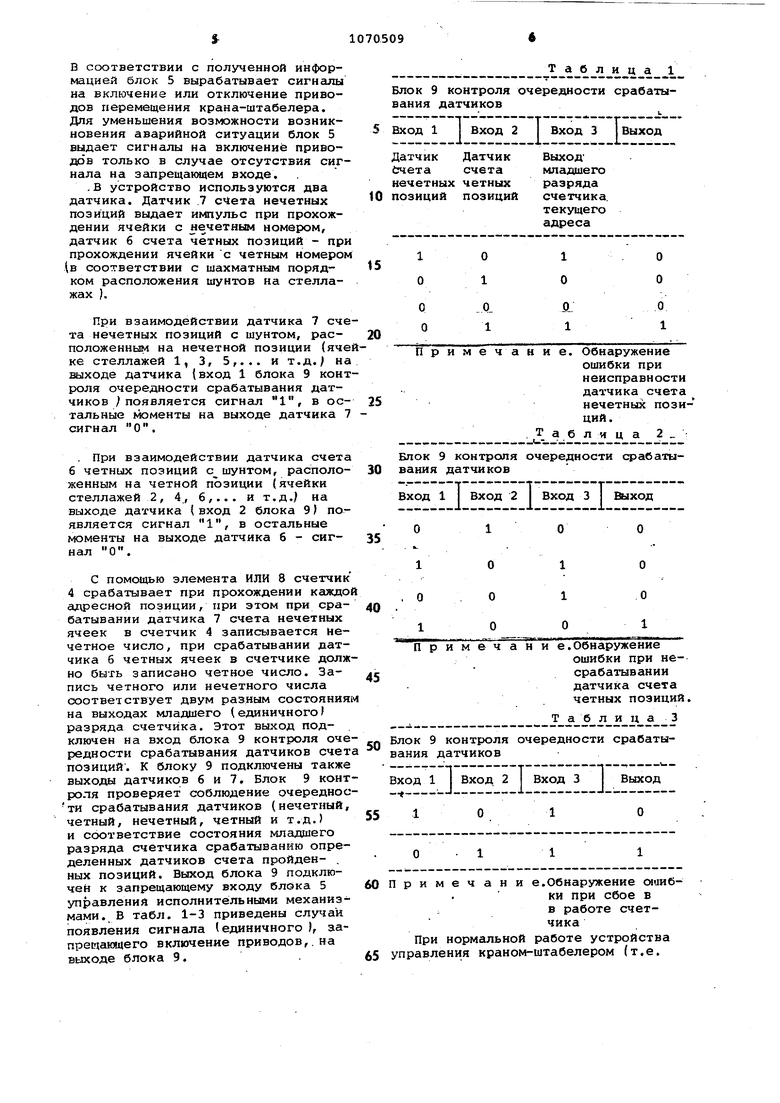
ред, Назад, Стоп в блок 5 управ 65 ления исполнительными механизмами. В соответствии с полученной информацией блок 5 вырабатывает сигналы на включение или отключение приводов перемещения крана-штабелера. Для уменьшения возможности возникновения аварийной ситуации блок 5 выдает сигналы на включение приводов только в случае отсутствия сигнала на Зсшрещающем входе. -В устройство используются два датчика. Датчик 7 счета нечетных позиций выдает иютульс при прохождении ячейки с нечетным номером, датчик б счета четных позиций - при прохождении ячейки с четным номером (в соответствии с шахматным порядком расположения шунтов на стеллажах ). При взаимодействии датчика 7 сче та нечетных позиций с шунтом, расположенным на нечетной позиции (яче ке стеллажей 1, 3, 5,... и т.д. на выходе датчика (вход 1 блока 9 конт роля очередности срабатывания датчиков / появляется сигнал 1, в остальные кюменты на выходе датчика 7 сигнал О. . При взаимодействии датчика счета б четных позиций с шунтом, расположенным на четной позиции (ячейки стеллажей 2, 4, 6,.,. и т.д.) на выходе датчика { вход 2 блока 9) появляется сигнал 1, в остальные моменты на выходе датчика б - сигнал О. С помощью элемента ИЛИ 8 счетчик 4 срабатывает при прохождении кгикдой адресной позиции, при этом при срабатывании датчика 7 счета нечетных ячеек в счетчик 4 записывается нечетное число, при срабатывании датчика б четных ячеек в счетчике долж но быть записано четное число. Запись четного или нечетного числа соответствует двум разным состояниям на выходах младшего (единичного разряда счетчика. Этот выход подключен на вход блока 9 контроля оче редности срабатывания датчиков счет позиций. К блоку 9 подключены также выхода датчиков б и 7, Блок 9 конт роля проверяет соблюдение очереднос ти срабатывания датчиков (нечетный, четный, нечетный, четный и т.д.) и соответствие состояния младшего разряда счетчика срабатыванию определенных датчиков счета пройден- . ных позиций. Выход блока 9 подключен к запрещающему входу блока 5 управления исполнительными механизмами. В табл. 1-3 приведены случаи появления сигнала (единичного ), запрещающего включение приводов,, на выходе блока 9. блица 1 ости срабатыд 3 Выход Обнаружение ошибки при неисправн ости датчика счета нечетных позиций. лица 2 .1. «,.. М. « м. ности срабаты3 1 3 I Выход О О О 1 Обнаружение ошибки при несрабатываниидатчика счета четных позиций. блица ости срабатыаружение ошибпри сбое в аботе счетае устройства лером (т.е. при отсутствии сбоев в работе датчиков 6 или 7 и при исправной рабо те рлока определения текущего адреса 4) на выходе блока 9 должен быть сигнал О, являющийся разре шающим для включения приводов кран штабелера с помощью блока 5 управления исполнительными механизмами В случае неисправности, например, при несрабатывании одного из датчиков или при сбое в работе счетчика 4 на выходе блока 9 должен появиться сигнал 1, запрещающий включение приводов крана-штабелера, что и позволяет избежать возникновения возможной в этом случае аварийной ситуации. Основным недостатком устройств автоматики, работающих на счетноимпульсном принципе, ограничивающим их использование в промышленности , является низкая надежность. Использование предлагаемого
1
IS ГЮ1
Bxoffz
1 14 о
Bxodf
TW1
rwr
и
л
Т10Т
1
Выход
19 TW6
(pue.l устройства позволяет увеличить надежность эксплуатации крановштабелеров, работающих в автоматическом режиме в реальных складских условиях. Разделение датчиков для счета четных и нечетных позиций-, введение цифрового индикатора и блока контроля очередности срабатывания датчиков позволяют обнаруживать неисправность в наиболее уязвимых узлах схемы - при вводе адресного задания и при определении текущего положения крана-штабелера. -При работе в устройстве автоматически обнаруживаются, ошибки в одном или любом нечетном числе сбоев сигналов с датчиков или в счетчике. Ожидаемый экономический эффект от использования устройства про является за счет снижения эксплуатационных расходов и повышения общей производительности работы скла да.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического управления штабелером | 1975 |
|
SU557375A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
