1
Изобретение относится к машино строению и может быть использовано в роботехнике для оценки качества роботов и манипуляторов.
Целью изобретения является расширение функциональных возможностей стенда путем измерения скорости перемещения захвата робота.
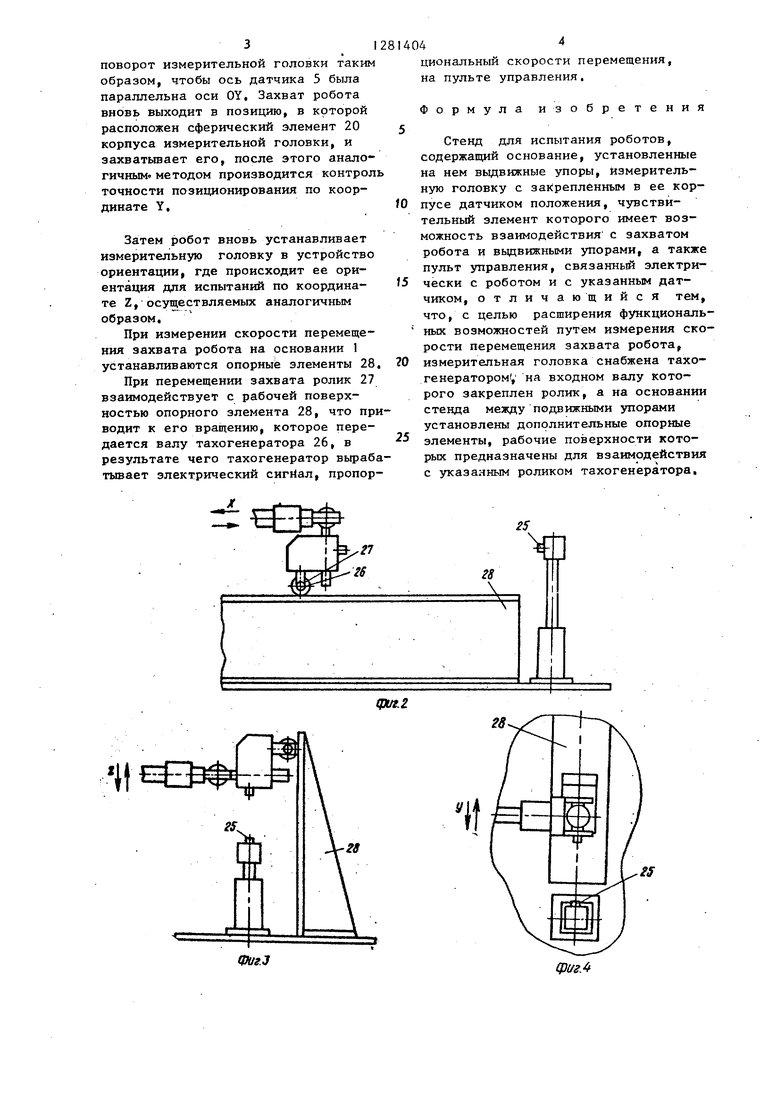
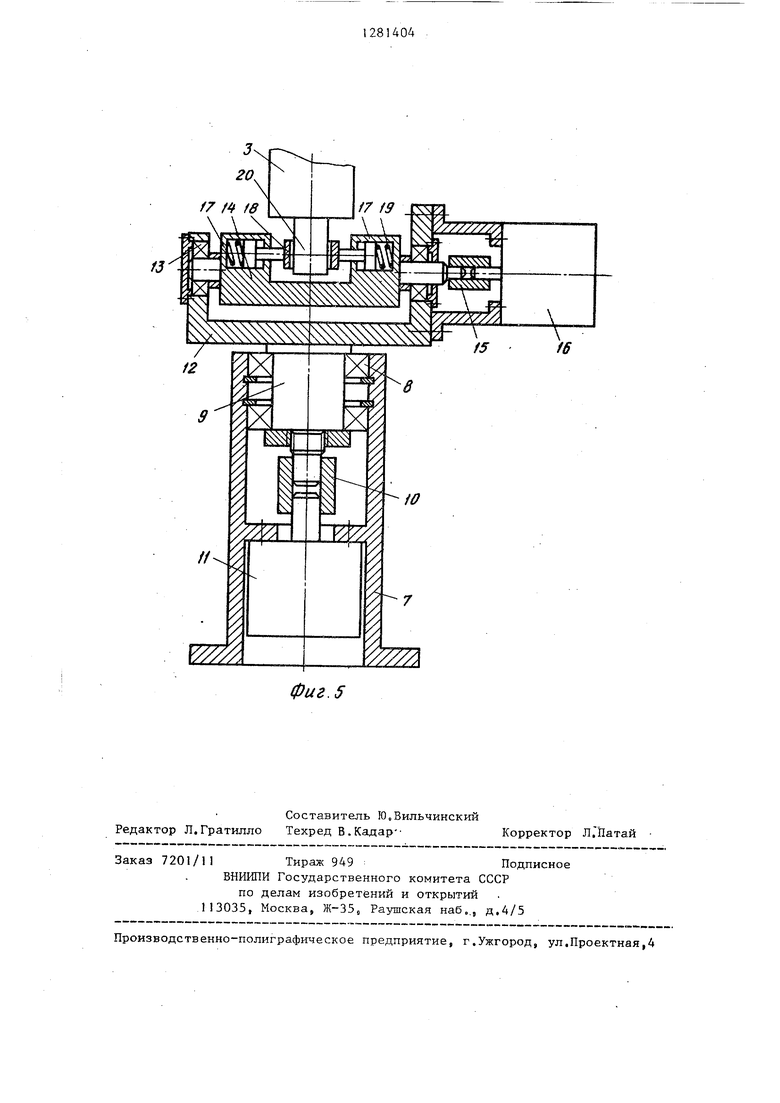
На фиг,1 показан стенд, общий ви на фиг,2 - 4 - положения измерительной головки при испытаниях по коорднатам X, Y, Z; на фиг, 5 - устройство ориентации измерительной головки
Стенд содержит основание 1, установленные на нем вьщвижные упоры измерительную головку 3, имеющую корпус 4 с закрепленным в нем датчиком 5, устройство 6 ориентации измерительной головки и систему управления (не показана), связанную электрически с роботом и датчиком 5
Устройство 6 ориентации содержит корпус 7 (фиг,5),- в котором в под- щипниках 8 установлен вал 9, соеди- нённьй муфтой 10 с приводом П поворота. На валу 9 закреплена вилк 12, в которой перпендикулярно оси вла 9 установлен в подшипниках ГВ вал 14, связанный муфтой 15 с приводом 16 поворота, В валу 14 смонтированы силовые цилиндры 17, на штоках которых закреплены губки 18 захвата, В цилиндрах 17 установлены пружины 19 сжатия,
Приводы И и 16 поворота и силовые цилиндры 17 управляются от систмы управления стендом.
Корпус 4 измерительной головки 3 снабжен двумя базовыми элементами 20 и 21, Элемент 20 имеет цилиндрическую форму и л бтановлен в губках 18 устройства 6 ориентации, а элемент 21 выполнен сферическим,
К аждый выдвшсной упор содержи стойку 22, в которой установлена с возможностью перемещения штанга 23, зафиксированная в стойке фиксатором 24, На конце щтанги 23 закреплены элементы 25 взаимодействия с датчиком 5,
На корпусе 4 измерительной головки закреплен датчик скорости перемещения - тахогенератор 26, на поворотном входном валу которого закреплен ролик 27,
На основании стенда установлены опорные элементы 28, рабочие поверх
ности которых предназначены для взаимодействия с роликом 27, РядЪм со стендом установлен испытьгоаемый робот 29, механическая рука которо- го снабжена захватом 30,
Стенд работает следующим образом.
Расчетным путем определяются положения, в которых дoJтаны находиться элементы 25, и их установка осущест- вляется путем перемещения вьздвижных упоров 2 основания 1 и перемещения штанг 23 в стойках 22 с последующей фиксацией штанг фиксаторами 24,
На пульте системы управления роботом производится программирование движений робота для работы в режиме испытаний и его система управления подключается к системе управления стендом.
Далее от системы управления стендом в систему управления робота поступает сигнал пуска. Захват 30 робота- 29 выходит на позицию, в которой расположен сферический элемент 20 корпуса 4 измерительной головки 3 и захватьгаает этот элемент, при этом губки 18 захвата устройст- ва ориентации разжимаются,
Таким образом, измерительная головка оказьгоается зажатой в захвате 30,
Затем робот осуществляет перемещение захвата 30 последовательно во
все требуемые точки позиционирования по координатам X, Y или Z, Каждьй раз при выходе захвата робота в точки позицион|1рования датчик 5 взаимодействует с элементами 25 и его
сигналы регистрируются в пульте управления стендом. Наличие сигналов от датчика 5 свидетельствует о выходе захвата 30 робота в запрограммированную точку позиционирования по коорди-.
нате X, Разность между наибольшей и наш- енЬшей величинами сигналов от датчика 5 при нескольких измерениях составляет погрешность позиционирования захвата в запрограммированной точке позиционирования по координате X.- После этого раскрываются губки 18 захвата устройства ориентации, робот устанавливает в него измерительную головку 3 и она зажимается, после чего захват 30 робрта отпускает измерительную головку и отходит от устройства ориентации. Затем устройством ориентации осуществляется
поворот измерительной головки таким образом, чтобы ось датчика 5 была параллельна оси OY, Захват робота вновь выходит в позицию, в крторой расположен сферический элемент 20 корпуса измерительной головки, и захватывает его, после этого аналогичным методом производится контрол точности позиционирования по координате Y.
Затем робот вновь устанавливает измерительную головку в устройство ориентации, где происходит ее ориентация для испытаний по координате Z, осуществляемых аналогичным образом.
При измерении скорости перемещения захвата робота на основании 1 устанавливаются опорные элементы 28,
При перемещении захвата ролик 27 взаимодействует с рабочей поверхностью опорного элемента 28, что приводит к его вращению, которое передается валу тахогенератора 26, в результате чего тахогенератор вьфаба тывает электрический сигйал, пропорO
5
0
5
циональный скорости перемещения, на пульте управления.
Формула изобретения
Стенд для испытания роботов, содержащий основание, установленные на нем вьщвижные упоры, измерительную головку с закрепленным в ее корпусе датчиком положения, чувствительный элемент которого имеет возможность взаимодействия с захватом робота и вьщвижными упорами, а также пульт управления, связанный электрически с роботом и с указанным датчиком, отличающийся тем, что, с целью расширения функциональных возможностей путем измерения скорости перемещения захвата робота, измерительная головка снабжена тахо- генератором , на входном валу кото рого закреплен ролик, а на основании стенда между подвижными упорами установлены дополнительные опорные элементы, рабочие поверхности которых предназначены для взаимодействия с указанным роликом тахогенератора.
I - 7
25
V
гв 
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания роботов | 1986 |
|
SU1335448A2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ТВЭЛОВ В ПУЧОК | 2014 |
|
RU2589950C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ГИБКОГО МАНИПУЛЯТОРА | 2019 |
|
RU2721769C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Стенд для испытания промышленных роботов | 1990 |
|
SU1764985A1 |
| Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата | 1980 |
|
SU919865A2 |
| Устройство для автоматической сборки деталей | 1981 |
|
SU1007897A1 |
| Стенд для испытаний манипуляторов | 1983 |
|
SU1135638A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
Изобретение относится к робототехнике и м.б. использовано для оценки качества роботов. Целью изобретения является расширение функциональных возможностей стенда. Стенд содержит основание. 1, установленные на нем выдвижные упоры 2, измерительную головку 3 с датчиком 5, устройст- во ее ориентации 6, установленное на основании, и систему управления. На концах упоров 2 закреплены элементы 25 взаимодействия с датчиками 5. На корпусе 4 измерительной головки закреплен датчик скорости перемещения (тахогенератор) на поворотном входном валу которого закреплен ролик. На основании стенда установлены опорные элементы, рабочие поверхности которых предназначены для взаимодействия с роликом. Рядом со стендом установлен испытьшаемый робот 29, механическая рука которого снаб- : жена захватом 30. 5 ил. V) ff иг. f
Фиг.З
28
фиг А
фиг.5
| Стенд-тренажер для оценки качества манипуляторных систем | 1977 |
|
SU643321A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
