Изобретение относится к области машиностроения и предназначено для определения точностных характеристик промышленных роботов /ПР/.
Целью изобретения является расширение функциональных возможностей стенда за счет определения характеристик робота не только в статике, но и в динамике.
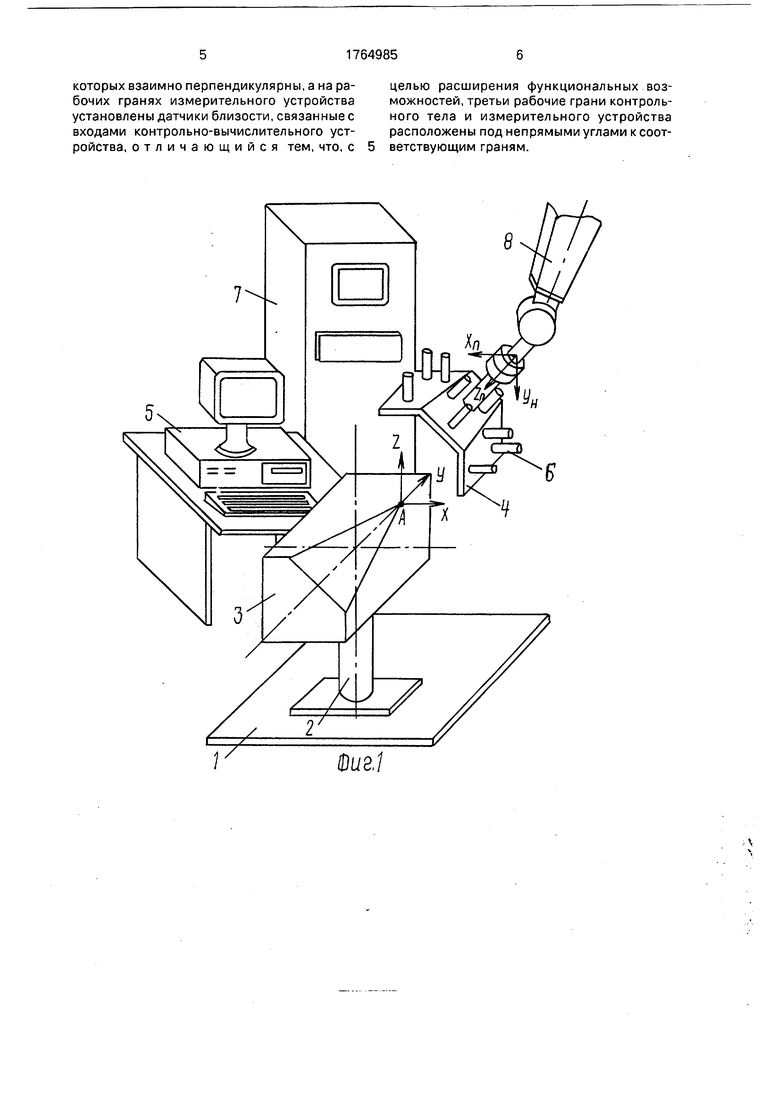
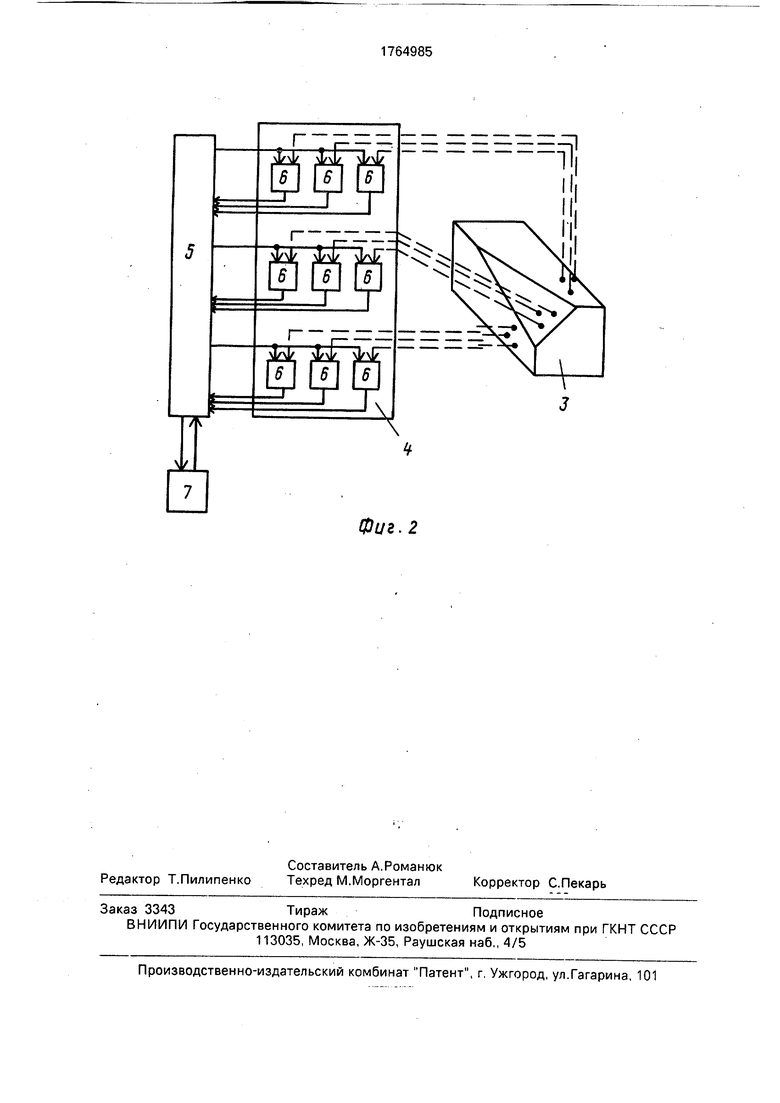
На фиг. 1 представлена схема контрольного тела и измерительного устройства; на фиг. 2 - функциональная схема стенда для испытания ПР.
Стенд для испытания ПР содержит основание 1, стойку 2, контрольное тело 3 измерительное устройство 4, контрольно- вычислительное устройство 5,датчики близости 6, устройство управления 7, испытуемый робот 8. Контрольное тело 3 закрепляется на стойке 2, которая обеспечивает возможность регулировки по высоте, а также по углу вокруг вертикальной и горизонтальной осей. Стойка 2 с закрепленным на ней контрольным телом 3 устанавливается на основании 1 в одном из мест крепления. Измерительное устройство 4 представляет собой трехгранник, на каждой грани которого установлено по одной группе датчиков близости 6, Выходы датчиков 6 подключены к первым входам контрольно- вычислительного устройства 5, вторые входы которого соединены с выходом устройства управления 7 испытуемого робота 8. Выходы контрольно-вычислительного устройства связаны с входами датчиков 6.
Стенд работает следующим образом. Для определения точностных характеристик работа в статике оператор с помощью пульта управления ПР формирует управляющую программу вывода измерительного устройства 4, закрепленного на выходном звене ПР, в заданную позицию в определенном направлении относительно контрольVJ
О
о
00
ел
ной позиции, В режиме воспроизведения записанной программы при достижении роботом контрольной позиции управляющее устройство ПР выдает сигналы, разрешающие опрос датчиков, а контрольно-вычислительное устройство опрашивает датчики и записывает их показания.
После выполнения всей программы оператор переводит контрольно-вычислительное устройство в режим обработки информации. Для однозначного определения положения и ориентации системы координат (СК) XnYnZn измерительного устройства относительно СК контрольного тела XYZ необходимо определить двенадцать параметров. Каждый из датчиков близости может измерять перемещение только в одном фиксированном направлении, которое обусловлено взаимным расположением трех граней измерительного устройства. Каждому датчику соответствует некоторая точка на поверхности контрольного тела. Положение каждой из этих точек в СК измерительного устройства характеризуется постоянными и переменными параметрами. Постоянные параметры могут быть заранее определены путем измерения мест установки датчиков, Переменные параметры - по показаниям соответствующих датчиков при их взаимодействии с контрольным телом. Таким образом, определяются все три координаты каждой из девяти точек на контрольном теле (в СК измерительного устройства), соответствующие показаниям каждого из девяти датчиков. Тройка точек на каждой из грани контрольного тела однозначно определяет положение граней в СК измерительного устройства. Составляя уравнения плоскостей, проходящих через каждую тройку точек, и решая их совместно, определяем координаты точки А (начало СК кон- трольного тела) в СК измерительного устройства. Используя полученную информацию о взаимном расположении рабочих граней контрольного тела и измерительного устройства, определяется также их взаимная ориентация.
Сравнение контрольных и фактических характеристик указанных положений и ориентации обеспечивает получение любых интересующих пользователя характеристик точности робота в статике (погрешность позиционирования, повторяемость, погрешность ориентации и др.).
Для определения погрешностей отработки траекторий и скорости оператор с помощью пульта управления ПР формирует управляющую программу методом от точки к точке, последовательно выводя измерительное устройство, закрепленное на фланце последнего звена ПР, в характерные узловые точки эталонной траектории (последние должны располагаться в пределах пространства, ограниченного диапазоном
5 измерения датчиков и длиной контрольного тела). Показания датчиков в узловых точках эталонной траектории, а также информация о скорости и характере движения между точками заносится в память контрольно-вычис10 лительного устройства.
В режиме воспроизведения записанной программы контрольно-вычислительное устройство опрашивает с определенной частотой датчики и записывает их показания в
15 память.
После отработки запрограммированной траектории оператор переводит контрольно-вычислительное устройство в режим обработки записанной информации, которая
0 произодится следующим образом. Вначале контрольно-вычислительное устройство производит расчет эталонных точек траектории, то есть точек, в которых должен был бы находиться центр СК измерительного ус5 тройства при условии идеального соблюдения характера движения между узловыми точками и запрограммированной скорости перемещения. Затем в эталонных точках рассчитываются эталонные ориентации со0 ответствующих координатных осей СК измерительного устройства. Затем, контрольно-измерительное устройство производит расчет фактических положений ориентации СК измерительного устройства
5 относительно СК контрольного тела.
Используя полученную информацию, можно определить любые интересующие пользователя динамические характеристики робота /погрешность отработки траекто0 рии, повторяемость траектории и др./.
Таким образом, данное техническое решение обеспечивает определение точностных характеристик робота не только в статике, но и в динамике, При этом динами5 ка движения робота может оцениваться для любых видов траекторий/ в том числе, при движении с реверсом, колебаниями и изменением ориентации/, которые не выходятза пределы пространства, ограниченного диа0 пазоном измерения датчиков и длиной контрольного тела.
Формула изобретения Стенд для испытания промышленных 5 роботов, содержащий основание, установленное на нем контрольное тело, измерительное устройство, установленное на конечном звене испытываемого робота, при этом контрольное тело и измерительное ус- тройство имеют по три рабочих грани, две из
которых взаимно перпендикулярны, а на ра-целью расширения функциональных возбочих гранях измерительного устройстваможностей, третьи рабочие грани контрольустановлены датчики близости, связанные сного тела и измерительного устройства
входами контрольно-вычислительного уст-расположены под непрямыми углами к соотройства, отличающийся тем, что, с5 ветствующим граням.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| Способ аттестации геометрических параметров механической руки промышленного робота | 1984 |
|
SU1258689A1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| Способ определения центра тяжести изделия подвешиванием по положению траверсы | 2021 |
|
RU2777341C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2185953C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2003 |
|
RU2252862C1 |
| Стенд для контроля перемещений промышленных роботов-манипуляторов | 1987 |
|
SU1565675A1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
Использование: для определения точностных характеристик промышленных роботов. Сущность изобретения; стенд содержит основание, установленное на нем контрольное тело, и измерительное устройство, установленное на конечном звене промышленного робота, при этом контрольное тело и измерительное устройство имеют по три рабочих грани, две из которых взаимно перпендикулярны, а на рабочих гранях измерительного устройства установлены датчики близости. Последние связаны с контрольно-вычислительным устройством,причем третьи рабочие грани контрольного тела и измерительного устройства расположены под непрямыми углами к соответствующим граням ,2 ил. Ё
fiwa/
Фиг. 2
| Вертю Ж | |||
| и Куафе Ф | |||
| Телеуправление роботами с помощью ЭВМ М.: Мир, 1989, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| „ | |||
