1
Изобретение относится к мащинострое- нию, а именно к захватным устройствам манипуляторов, применяемым в случаях, когда необходимо сохранение оси цилиндрической детали в захвате при недостаточно точном исходном положении детали.
Цель изобретения - расщирение функциональных возможностей устройства.
На фиг. 1 изображен захват манипулятора; на фиг. 2 - элемент предварительного центрирования на конусной втулке.
Захват манипулятора состоит (фиг. 1) из хвостовика 1, захватных рычагов 2, установленных на осях 3 и подпружиненных пружинами 4, тарелки 5 и мембраны 6. Хвосто- 15 вик 1 соединен с корпусом 7, в котором размещены втулка 8, пружина 9, а также стержень 10 с установленной на нем втулкой И и пружиной 12. От выпадания втулка удерживается болтом 13, а втулка 11 -.винтом 14. Ограничение хода рычагов 2 осуществля- 20 ют болты 15. Конусная втулка 8, центрирующая деталь, снабжена элементами предварительного центрирования - выступами-16 (фиг. 2).
Устройство работает следующим образом.
Манипулятор опускает захват к детали на позиции накопителя, причем позиционирование детали осуществляется известным способом, например с помощью упора-приз- мы. Если деталь точно сцентрирована относительно оси захвата, то конусная втулка 8 беспрепятственно входит в отверстие детали. Затем воздух подается в пневмокамеру, и мембрана 6 посредством тарелки 5 поворачивает захватные рычаги 2 вокруг осей 3. Рычаги 2 подводятся под деталь, не замыкая ее по наружному контуру. Затем манипулятор переносит деталь на позицию обработки (сборки), при этом захват позиционируется с помощью втулки 11, которая входит в гнез- до ловителя, установленного на позиции обработки (сборки). Втулка 11 выполнена подпружиненной и при установке (опускании) детали на позицию обработки она может перемещаться вдоль стержня 10, не выходя из гнезда ловителя. Режим захватных рычагов
0
5 0
5
0 0 г
5
2 осуществляется пружинами 4, при этом пневмокамера отключается от подачи воздуха. Затем манипулятор возвращает захват на позицию накопителя.
После этого цикл повторяется.
Если деталь установлена недостаточно точно относительно оси захвата, то элементы предварительного центрирования - выступы 16 входят в отверстие детали и заклиниваются в нем. При дальнейщем опускании захвата втулка 8 перемещается вдоль корпуса до опускания захвата на требуемую высоту. При этом деталь упирается боковой поверхностью в упор-призму, поэтому сместить ее до совмещения с осью захвата втулка 8 не может. Затем под деталь подводятся рычаги 2, и захват поднимает деталь. При этом деталь больще не опирается на упор-призму, пружина 9 стремится вернуть втулку 8 в исходное положение и, так как деталь в захватных рычагах 2 не замкнута по контуру, то усилия возврата втулки 8 оказывается достаточно для того, чтобы сдвинуть деталь до положения соосности с осью захвата. Когда втулка 8 возвращается в исходное положение, деталь оказывается окончательно сцентрированной относительно оси захвата. Так как в основании выступа 16 лежит эллипс, то контакт выступов 16 с внутренним (центрирующим) отверстием детали осуществляет- ся по образующей конуса (по линии), что значительно расщиряет допуск на смещение исходного положения детали и практически исключает возможность того, что выступ 16 наступит на деталь.
Формула изобретения Захват манипулятора, содержащий корпус с приводом и с щарнирно-установленны- ми на корпусе захватными рычагами, отличающийся тем, что, с целью расщирения функциональных возможностей, он снабжен двумя коаксиальными подпружиненными втулками, установленными в корпусе с возможностью перемещения вдоль оси захвата, причем рабочий торец внутренней втулки выполнен цилиндрическим с конической фаской на наружной поверхности, а на торце наружной Втулки выполнены два выступа, наружная базовая поверхность которых выполнена в виде усеченного конуса, в основании которого выполнен эллипс, а внутренняя поверхность выступов указанной втулки выполнена цилиндрической, причем больший диаметр эллипса равен наружному диа- метру втулки, а диаметр цилиндрической поверхности выступов равен внутреннему лиа- метру втулки.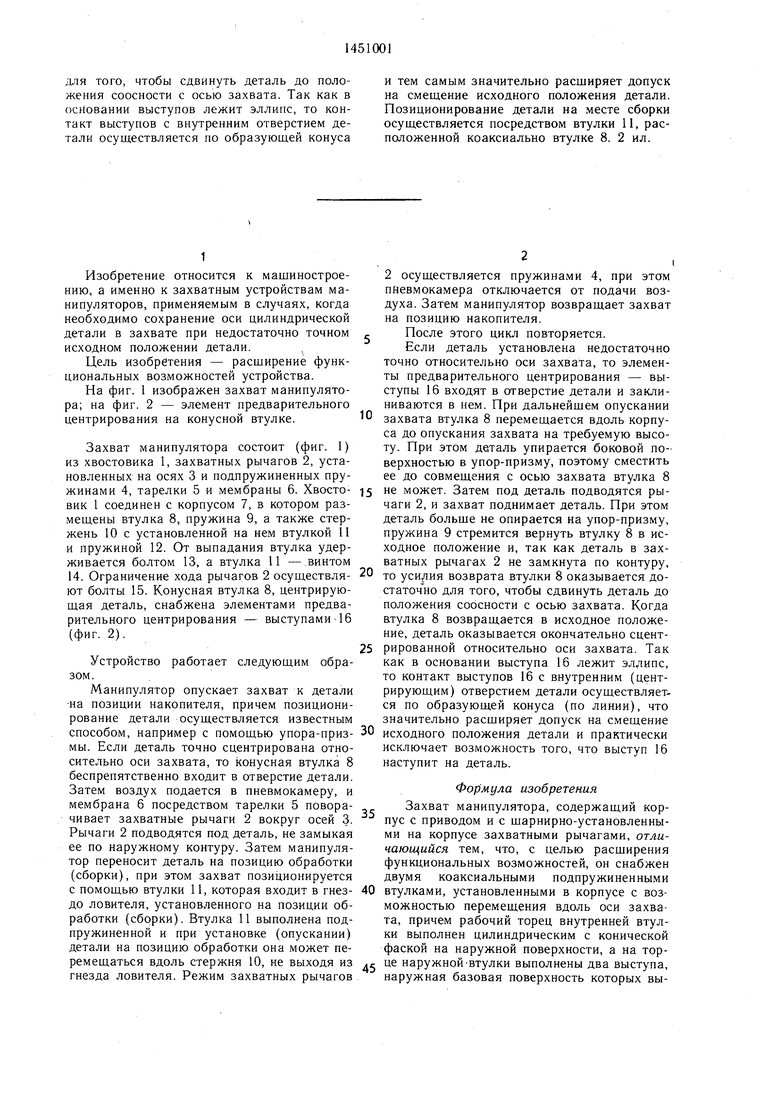
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1761463A1 |
| Вакуумное захватное устройство | 1983 |
|
SU1094735A1 |
| Устройство для захвата полых деталей | 1984 |
|
SU1247266A2 |
| Захватное устройство | 1985 |
|
SU1299940A1 |
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Устройство для набора прокладок во внутреннюю полость изделия | 1973 |
|
SU479608A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Захват манипулятора | 1987 |
|
SU1537523A1 |
| Схват | 1986 |
|
SU1315303A1 |
| Транспортное устройство автоматической линии спутникового типа | 1986 |
|
SU1447640A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов. Цель изобретения - расширение функциональных возможностей устройства за счет использования двух коаксиальных подпружиненных втулок, используемых для центрирования и позиционирования захватываемых деталей. Манипулятор опускает захват к детали на позиции накопителя. Позиционирование детали осуществляют с помощью упора-призмы. Если деталь недостаточно точно установлена относительно оси захвата, то элементы предварительного центрирования, выполненные на наружном торце втулки 8 в виде двух выступов, причем их наружная базовая поверхность выполнена в виде усеченного конуса, в основании которого лежит эллипс, а внутренняя поверхность выполнена цилиндрической, входят в отверстие детали и заклиниваются в нем. При дальнейшем опускании захвата втулка 8 перемещается вдоль корпуса 7 до опускания захвата на требуемую величину. При этом деталь упирается боковой поверхностью в упор-призму, поэтому сместить ее до совмещения с осью захвата конусная втулка 8 не может. Затем под деталь подводятся рычаги 2 и захват поднимает деталь. При этом деталь не опирается на упор-призму, пружина 9 стремится вернуть втулку 8 в исходное положение, и так как деталь в захватных рычагах 2 не замкнута по контуру, то усилия возврата втулки 8 оказывается достаточно (О (Л
8
фиг. 2
| Захват манипулятора | 1981 |
|
SU982899A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
