гатель 2, кинематически связанный с наматывающш механизмом, обеспечивает регулирование натяжения материала, а электродвигатель 4, кинематически связанный с подающим механизмом, - регулирование скорости перемотки. В качестве датчика линейной скорости материяла применен тахо генератор 6. Натяжение материала устанавливается задатчиком натяжения 24 и поддерживается регулятором тока 7. Линейная скорость материала задается задатчиком скорости 22 и поддерживается постоянной регулятором тока 8 и тахогенератором 6. R статическом режиме работы сигнал от адатчика скорости 22.поступает в
1
Изобретение откосится к системам регулирования натяжения. 11;ель изобретения - повышение точности регули- (рования в моменты пуска и останова наматывающего и подающего механизмов,
На фиг, 1 изображена структурная схема устройства; на фиг, 2 - диаграммы напряжений, поясняющие работу устройства
Устройство содержит наматывающий механизм 1 (фиг.1), кинематически связанный с. злектродвигателем 2, и подающий механизм 3, связанный с электродвигателем 4. Измерительные ролики 5 линейной скорости кинематически связаны; с тахогенератором 6, Регуляторы 7 и 8 тока выходами подключены к электродвигателям 2 и 4, а входами - к выходам сумматоров 9 и 10 Блок 11 управления содержит операционные усилители )2 и 13, выходы кото- . рых подключены к входам инвертирующих усилителей-ограничителей 14,15 и через резисторы 16 и 17 - к первому выводу конденсатора 18 и к входу сумматора 10, другой вход которого связан с тахогенератором 6, Второй вывод конденсатора 18 соединен с инвертирующими входами усилителей 12,13 и с одним из выводов резистора 19, другой вьтод которого соединен с шиной нулевого потенциала, Разнопо- лярные источники 20 и 21 опорного
8/1Q2 7
ро улятор тока 8 иепосредствеино через резистор 23 и сумматор 10, В динамическом режиме напряжение с за- датчика скорости 22 поступает также через конденсатор 18 на инвертирующие входы операционньк усилителей 12,13, которые воздействуют через инвертирующие усилители-ограничители 14,15 и сумматоры 9,10 на регуляторы тока 7,8, Таким образом в динамическом режиме перемотки при ускорении и замедлении во время пуска и останова блок управления 11 генери- рует сигналы, компенсирующие инерционные моменты наматывающего
1и подающего 3 механизмов .
2ил.
напря кения подключен 1 к неинвертирующим входам операционных усилителей 12 и 13, Задатчик 22 скорости через резистор 23 соединен с первым вьшодом
конденсатора 18 Задатчик 24 натяжения соединен с входом сумматора 9, другие входы которого подключены соответственно к выходам инвертирующих усг1лителер1-ограничителей 14. и 15.
Устройство работает следующим образом.
Материал в процессе перемотки поступает с подающего механизма 3 и наматывается в рулон наматываюпшм механизмом 1, Электродвигатель 2 обеспечивает регулирование натяжения материала, электродвигатель 4 - регулирование скорости перемотки. Регулятор 7 тока является системой автоматического регулирования натяжения с обратными связями по току электродвигателя 2 наматываемого механизма 1, а регулятор 8 тока - системой автоматического регулирования скорости с обратными связями по току электродвигателя 4 подающего механизма, а также по линейной скорости перематываемого материала. В качестве датчика линейной скорости служит тахо- генератор 6, связанньш с измеритель- HbiMH роликами 5.
Натяжение материала при перемотке устанавливается задатчиком 24 натя
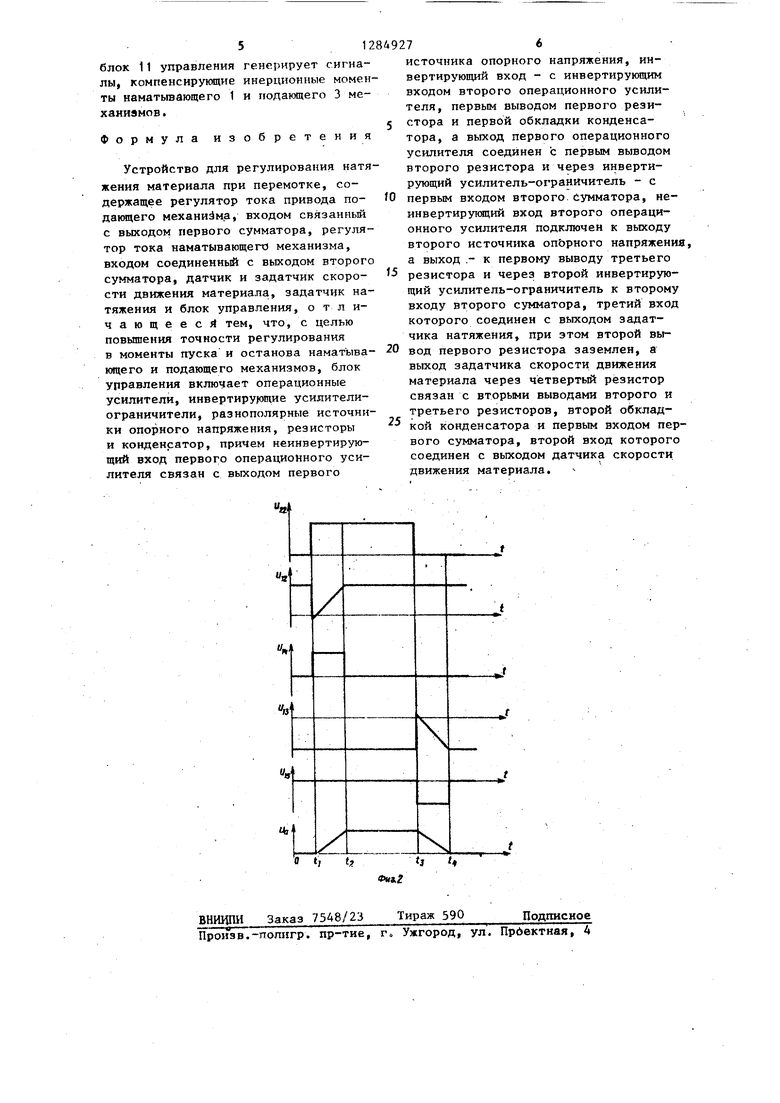
женил поддерживается регулятором 7 тока. Линейная скорость задается задатчиком 22 скорости и поддерживается постоянной регулятором 8 тока и тахогенератором 6 путем изменения напряжения на электродвигателе 3. В статическом режиме работы сигнал от задатчика 22 скорости поступает в регулятор 8 тока непосредственно через резистор 23 и сумматор 10. В динамическом режиме, например пуске в момент времени t, (фиг.2), напряжение Uj,, задатчика 22 скорости поступает также на инвертирующие входы операционных усилителей 12 и 13 через конденсатор 18. Предположим, что операционный усилитель 12 открыт положительным потенциалом от источника 20 опорного напряжения, а усилитель 13 открыт отрицательным потенциалом от источника 21 опорного напряжения, т.е. на выходе операционного усилителя 12 присутствует положительное напряжение, на выходе операционного усилителя 13 - отрицательное напряжение Следовательно, в момент времени t, при заряде конденсатора 18 с резистора 19 снимается положительньш потенциал. Напряжение U, на выходе усилителя 12 уменьшится скачком и по мере заряда конденсатора 18 в интервале t, плавно возрастает до первоначального уровня.
Состояние операционного усилите- Гля 13-не изменится, так как полярность сигнала на его инвертирующем входе совпадает с полярностью напряжения насыщения на неинвертирующем входе от источника 2 опорного напряжения
Потенциал точки а также скачком изменится и скомпенсирует сигнал задатчика 22 скорости. Следовательно, напряжение U точки ч относительно нулевой шины питания в момент времени t| равно нулю. В момент t оно примет значение уставки задатчика 22 скорости. Соответственно плавно изме35
нится скорость подающего 3 и наматывающего 1 механизмов до нового значения. Так как конденсатор 18 включен через развязывающие резисторы 16 и 17 в цепь отрицательной обратной связи операционных усилителей 12 и 13, то изменение напряжения Ug носит линейный характер, соответственно разгон электропривода явля- е.тся равноускоренным. Во время раз0
5
0
5
0
0
гона в интервале t( ё t t на выходе инвертируюшего усилителя-ограничителя 14 появится сигнал U который увеличит уставку задатчика 24 натяжения, увеличится ток электродвигателя 2 и его тянущий момент, компенсирующий инерционный момент наматывающего механизма.
В установившемся режиме в интервале
Ч t
it конденсатор 18 заряжен, операционные усилители 12 и 13 возвращаются в первоначальное состояние, т.е. на выходе операционного усилителя 12 присутстйует положительное напряжение, на выходе усилителя 13 - отрицательное напряжение, потенциал U определяется только уставкой задатчика 22 скорости. Кор- ректирующий сигнал со входа сумматора 9 снят.
В момент tj, останова подающего 3 и наматывающего 1 механизмов, когда уставка задатчика 22 скорости равна нулю, ковденсатор 18 разряжается по цепи: резисторы 16 и 17, выходные сопротивления операционных усилителей 12 и 13, источник питания (не показан), шина нулевого потенциала, резистор 19. На резисторе 19 вьще- лится отрицательное напряжение. Состояние операциолного усилителя 2 не изменится, а операционный усилитель 13 скачком изменит свое состоя- ние его выходное напряжение U, вос- 5 становит потенциал точки а до прежне- го уровня уставки задатчика 22 скорости, которое по мере разряда конденсатора 18 в интервале t линейно спадает до нуля, подающий 3 и наматывающий 1 механизм равноза- медленно остановятся. В этом Же интервале времени на выходе инвертирующего усилителя-ограничителя 15 появится отрицательный корректирующий сигнал и,5 , который поступит через сумматор 9 в регулятор 7 тока.
Возникший при этом отрицательный вращающий момент электродвигателей 2 и 4 компенсирует инерционный момент наматывающего 1 и подающего 3 механизмов, направленный по ходу движения.
При изменении полярности сигнала задатчика 22 скорости во время реверса реверсируются также корректирующие сигналы блока 11 управления.
Таким образом,в динамическом режиме перемотки при ускорении и замедлении во время пуска и останова
блок 11 управления генерирует сигналы, компенсирующие инерционные моменты наматьгаающего 1 и подающего 3 ме- ханиэмов
Формула изобретения
Устройство для регулирования натяжения материала при перемотке, содержащее регулятор тока привода подающего механизма, входом связанньй с выходом первого сумматора, регулятор тока наматывающего механизма, входом соединенный с выходом второго сумматора, датчик и задатчик скорости движения материала, задатчик натяжения и блок управления, отличающееся тем, что, с целью повышения точности регулирования в моменты пуска и останова наматывающего и подающего механизмов, блок управления включает операционные усилители, инвертиру)ощие усилители- ограничители, разнополярные источники опорного напряжения, резисторы и конденсатор, причем неинвертирующий вход первого операционного усилителя связан с выходом первого
t; ( «J
ВНИИПИ Заказ 7548/23 Тираж 59Q Подписное rfpojisв.-попигр. пр-тие, г. Ужгород, ул. ПрЬектная, 4
источника опорного напряжения, инвертирующий вход - с инвертирующим входом второго операционного усилителя, первым выводом первого резистора и первой обкладки конденсатора, а выход первого операционного усилителя соединен с первым выводом второго резистора и через инвертирующий усилитель-ограничитель - с первым входом второго.сумматора, не- инвертируняций вход второго операционного усилителя подключен к выходу второго источника опЬрного напряжения, а выход .- к первому выводу третьего 5 резистора и через второй инвертирующий усилитель-ограничитель к второму входу второго сумматора, третий вход которого соединен с выходом задат- чика натяжения, при этом второй вывод первого резистора заземлен, а выход задатчика скорости движения материала через четвертый резистор связан с вторыми выводами второго и третьего резисторов, второй обкладкой конденсатора и первым входом первого сумматора, второй вход которого соединен с выходом датчика скорости движения материала.
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод перематывающего устройства | 1988 |
|
SU1578076A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДИАМЕТРОМ ОБОЛОЧКИ КАБЕЛЯ (ПРОВОДА) С ОПТИМАЛЬНОЙ ПРОИЗВОДИТЕЛЬНОСТЬЮ | 2000 |
|
RU2185673C2 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| Устройство для управления перемещением магнитной ленты в лентопротяжном механизме | 1985 |
|
SU1328845A1 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Устройство для транспортирования магнитной ленты | 1985 |
|
SU1265846A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
Изобретение относится к устройствам для регулирования натяження при перемотке. Цель изобретения - повышение точности регулирования в моменты пуска и останова наматьшаю- .щего и подающего механизмов. Устройство содержит подающий механизм 3, материал с которого поступает йа на- матьшающий механизм 1. Электродви (Л с ю СХ) 4аь ;о ю ч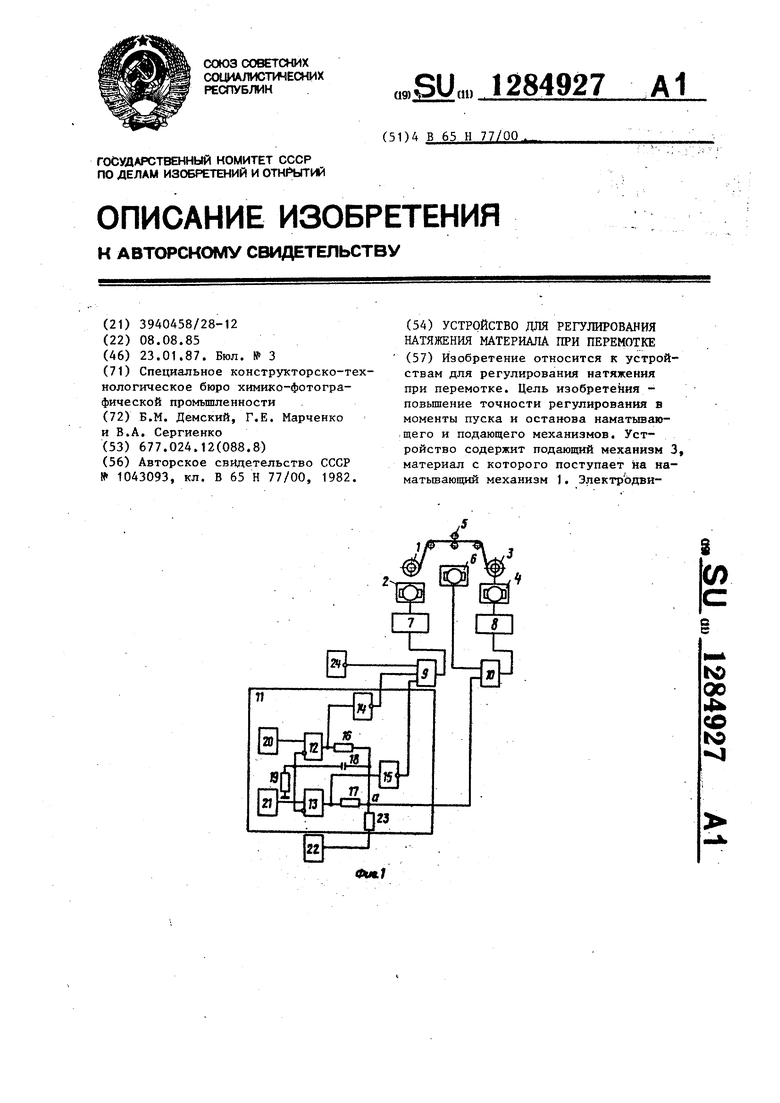
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1982 |
|
SU1043093A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
