Изобретение относится к манипулирующим устройствам и может быть использовано в роботизированных комплексах для автоматической подачи заготовок в рабочую зону робота.
Цель изобретения - экономия рабочей площади, занимаемой устройством.
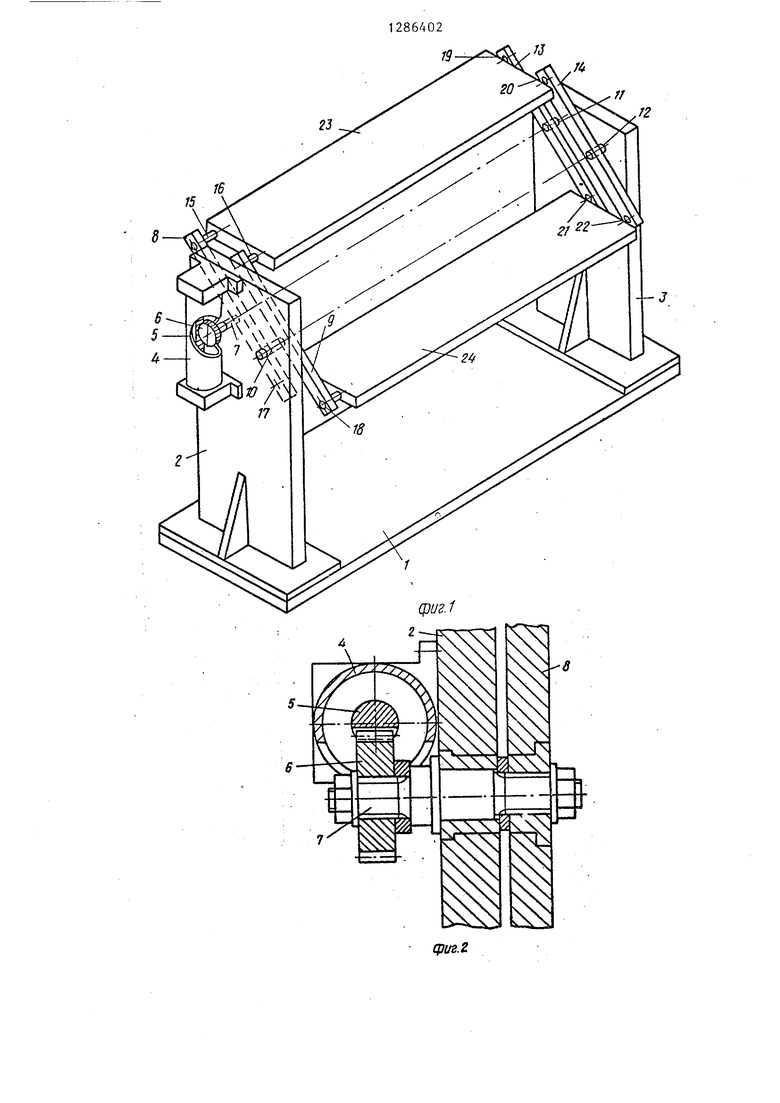
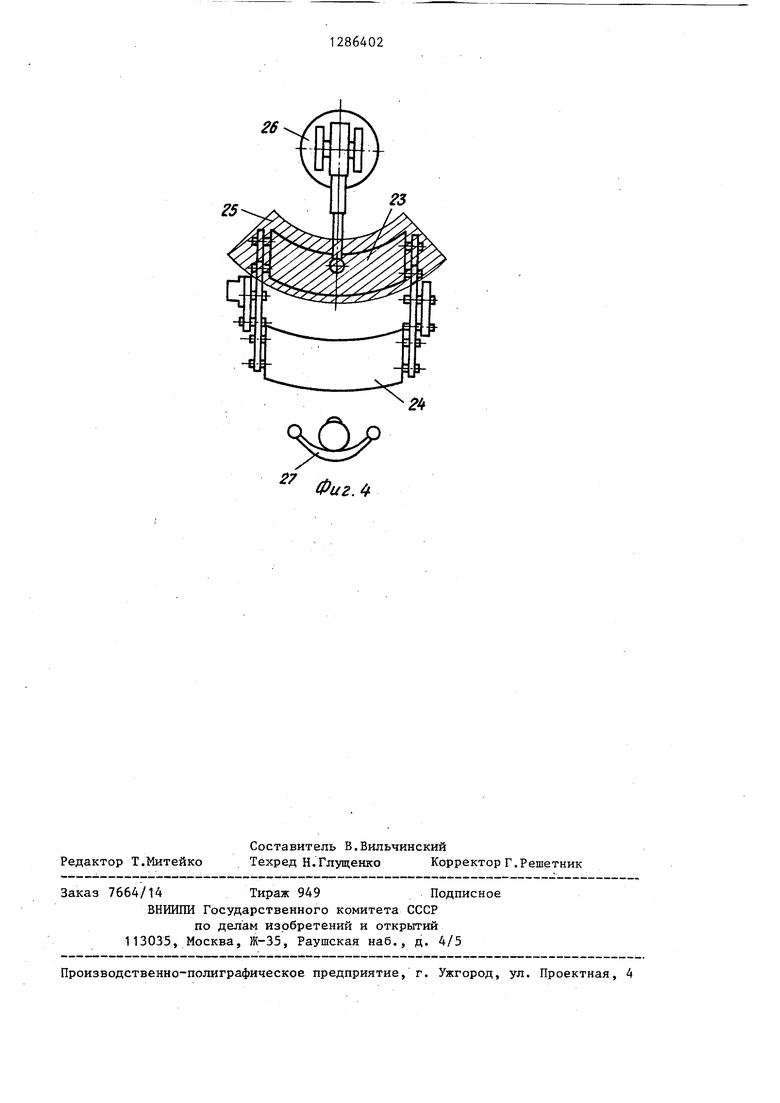
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 - шарнир, связанный с валом привода подачи, разрез; на фиг.З - вид А на фиг.1; на фиг.4 - устройство и его взаимное положение с роботом и оператором, план.
Устройство для подачи заготовок в рабочую зону робота содержит основание 1, на котором установлены две опорные стойки 2 и 3. На стойке 2 установлен привод подачи, выполненный в виде пневмодилиндра 4 с рейкой 5, которая находится в зацеплении с зубчатым колесом 6, закрепленным на валу 7. Последний проходит через стойку 2 и жесткр связан с одним из поворотных стержней 8 сдвоенного шарнирного параллелограммного механизма Другой стержень 9 этого параллелограммного механизма на стойке 2 расположен параллельно стержню 8 и свя- .зан со стойкой 2 через шарнир 10. На противоположной опорной стойке 3 в шарнирах 11 и 12 установлены параллельно расположенные поворотные стержни 13 и 14 второго параллелограммного механизма. На концах стержней 8, 9, 13 и 14 имеются шарниры 15 - 22, через которые осуществляется связь штанг параллелограммных механизмов с загрузочными столами 23 и 24. Конфигурация загрузочных столов в плане может быть близкой к конфигурации рабочей зоны 25 робота- 26. Оператор 27 располагается с противоположной стороны устройства.
Устройство работает следующим образом.
5
0
5
0
5
0
5
В положении I (фиг.З) стол 23 находится в рабочей зоне 25 робота 26, а стол 24 - перед оператором 27. Осуществив снятие готовых деталей и закрепление на столе 24 заготовок, под-, лежащих обработке, оператор включает команду на смену столов в рабочей зоне робота. После окончания рабочего цикла, запрограммированного для стола 23, робот дает команду на смену столов. Если к этому моменту поступило разрешение от оператора, то выполняется ход рейки 5 вверх и поворот зубчатого колеса 6, в результате чего столы 23 и 24 занимают положение II (фиг.З), и стол 24 оказывается в рабочей зоне робота, а стол 23 - перед оператором. Далее робот выполняет рабочий цикл, запрограммированный для стола 24, а оператор производит сня- тие готовых деталей и установку заготовок на стол 23. Далее цикл повторяется .
Формула изобретения
Устройство для подачи заготовок в рабочую зону робота, преимущественно сварочного, содержащее основания, установленный на нем опорно-поворотный узел, два загрузочных стола, смонтированных на опорно-поворотном узле, и привод перемещения столов, отличающееся тем, что, с целью экономии рабочей площади, опорно-поворотный узел выполнен в виде двух стоек, на внутренних поверхностях которых смонтированы по два поворотных стержня, середины которых шарнирно связаны со стойками, а концы - с торцами загрузочных столов и образуют с ними шарнирные параллелограммы, причем на одной из с тоек закреплен привод, кинематически связанный с поворотным стержнем одного параллелограмма. . .
J
15
16
19./J
/4
//
гг
ФигЛ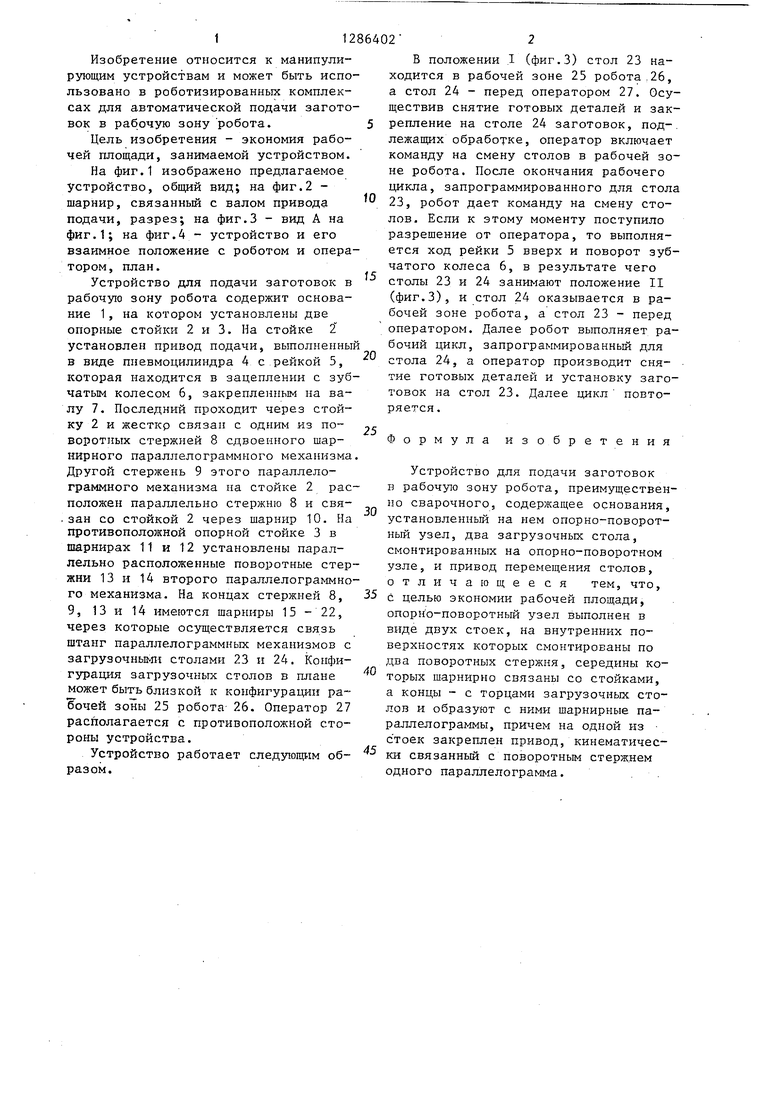
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Поворотный стол для подачи кассет с деталями к роботу | 1989 |
|
SU1792775A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Устройство для отделения верхнего листа от стопы Васильева В.И. | 1986 |
|
SU1484416A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1532148A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Промышленный робот | 1978 |
|
SU837851A1 |
| Загрузочное устройство к роботизированному комплексу | 1986 |
|
SU1470401A1 |
Изобретение относится к манипу- лирз ющим устройствам и может быть использовано в роботизированных компсоты. 83, ОК у- ислексах для автоматической подачи заготовки в рабочую зону робота. Целью изобретения является экономия рабочей площади, занимаемой устройством. На двух стойках смонтирован сдвоенньй параллелограммный механизм с двумя столбами 23 и 24. В положении I на столе 23 производится съем готовых изделий и установка деталей, а на столе 24 - обработка деталей роботом. Далее привод 4 перемещает параллелограммный механизм в положение II, при котором обработка ведется на стог ле 23, а на столе 24 - съем изделий и установка деталей. 4 ил. Buff А i СЛ 1 PW2.5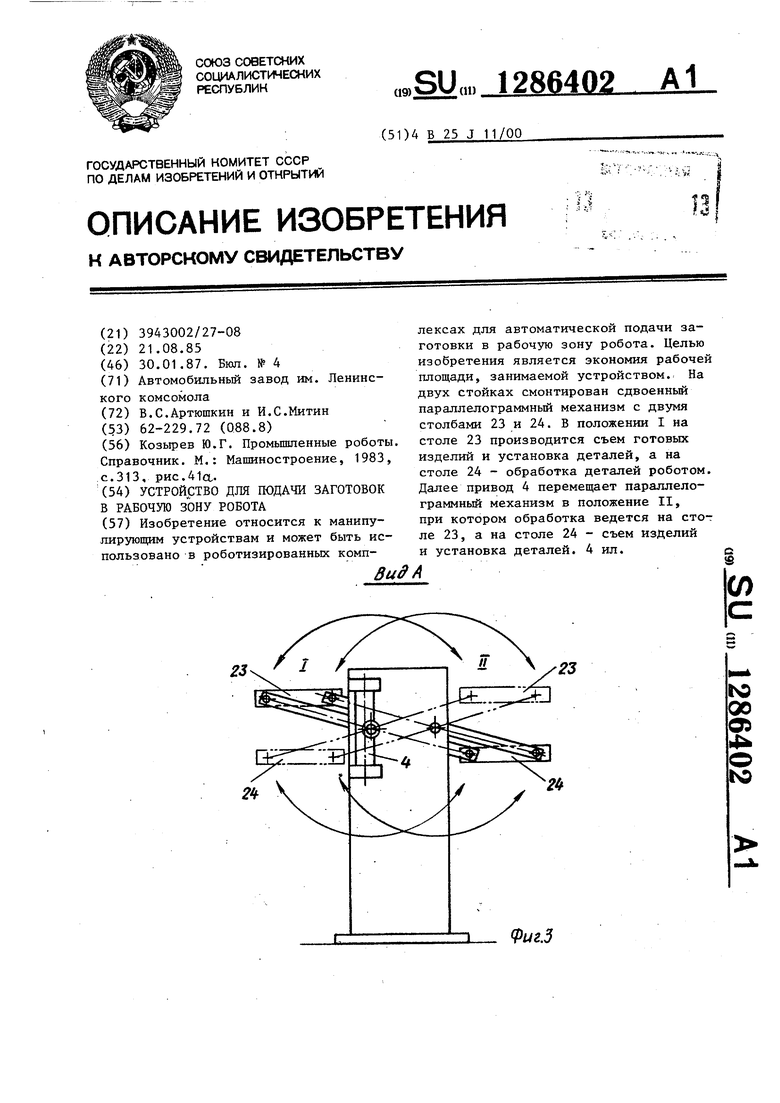
Редактор Т.Митейко
Составитель В.Вйльчинский
Техред Н.ТлущенкоКорректор Г.Решетник
Заказ 7664/14 Тираж 949Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с.313, рис.41а. |
