6 7
Фи8.1
Изобретение относится к машиностроению, в частности к конструкциям манипуляторов, и может быть использовано при механизации производственных, процессов в различных отраслях техники.
Целью изобретения является увеличение грузоподъемности за счет повышения жесткости конструкции руки ма- нипулято.ра в направлении, перпендикулярном оси руки манипулятора.
На фиг,1 изображена рука манипулятора в исходном положении, общий вид; на фиг.2 - то же, в вьщвинутом поло- жении, разрез.
Рука манипулятора содержит основание I , к которому одними концами прикреплены упругие элементы, выполненные в виде спиральных (рулонных) пружин 2 и 3 сжатия, причем спиральные пружины расположены концентрично (т.е. соосно друг в друге с-разьшм направлением навивки. Свободные концы пружин 2 и i закреплены на фланце, например стакане А, к которому крепится схват 5. Привод осевого перемещения содержит, например, двигатель 6 {вращения, па оси которого закреплен барабан 7, на котором намотана гиб- кал тяга 8, соединенная через блок 9 со стаканом 4 и размеще нная по оси руки манипулятора, т.е. спиральных пружин 2 и 3.
Рука манипулятора работает следую- щим образом.
В исходном положении рука манипулятора находится в сложенном положении. Для выдвижения руки манипулятора в осевом направлении включается двигатель 6, при этом гибкая тяга 8 разматывается с барабана 7 и под действием упругих свойств спиральных (рулонных) пружин 2 и 3 схват 5 вместе со стаканом А выдвигается вперед. Для.перемещения схвата в обратном направлении осуществляется реверс двигателя 6.
Таким образом в поперечном направлении спиральные (рулонные) пружины имеют большую жесткость, обусловленную трубчатым сечением спиральной (рулонной) пружины при смещении витков металлических лент друг относительно друга. Это позволяет уменьшить прогиб стрелы руки манипулятора прн переносе груза, следовательно увеличиваются грузоподъемность и точность позиционирования руки манипулятора. Наличие двух спиральных (рулонных) пружин, размещенных соосно одна в другой с разнонаправленным направлением навивки спиралей, необходимо для того, чтобы скомпенсировать осевое вращение схвата 5, так как при наличии одной рулонной пружины при осевом перемещении схвата 5 свободный конец пружины с закрепленным на нем охватом будет иметь вращение вокруг оси пружины.
Формула изобретения
Рука манипулятора, содержащая основание с приводом, фланец с схватом, упругие элементы, выполненные в виде спиральных пружин с разным направлением навивки, и гибкую тягу, связанную одним концом с приводом, а другим концом - с фланцем, отличающаяся тем, что, с целью увеличения грузоподъёмности, спиральные пружины установлены концектрично, одни концы спиральных пружин закреплены на основании, а другие их концы - на фланце, при этом гибкая тяга расположена по оси спиральных пружин.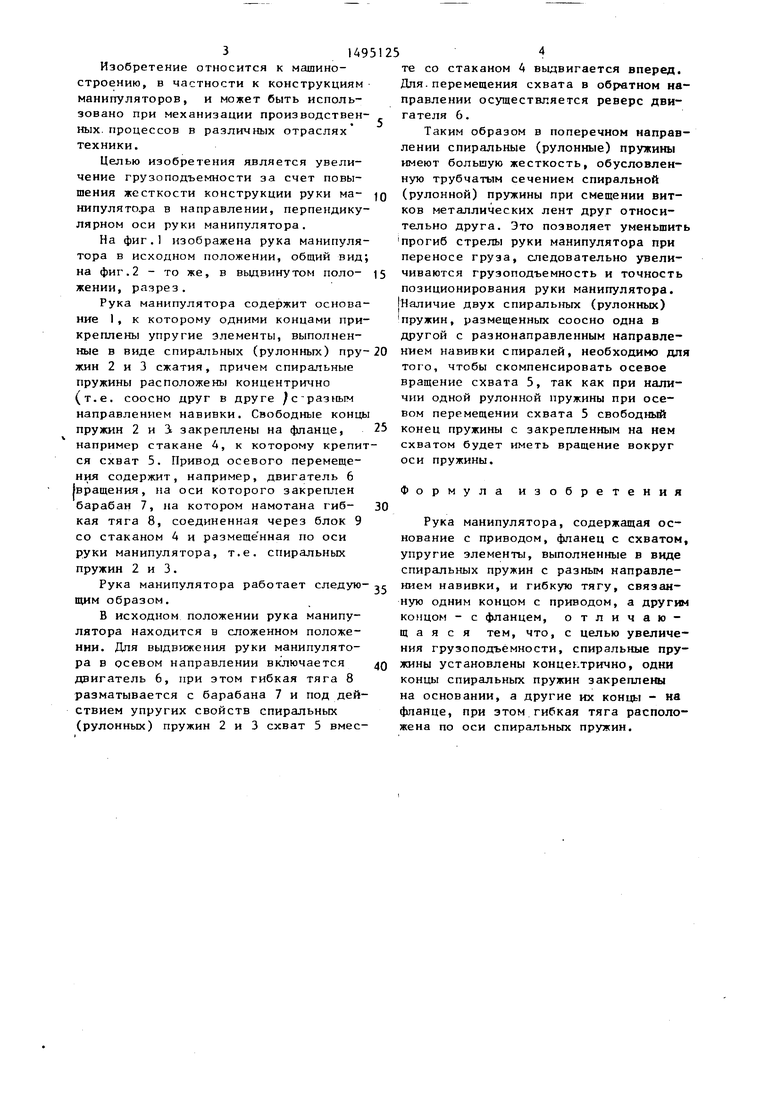
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| Механическая рука манипулятора | 1986 |
|
SU1414626A1 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Манипулятор | 1982 |
|
SU1065185A1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1273579A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
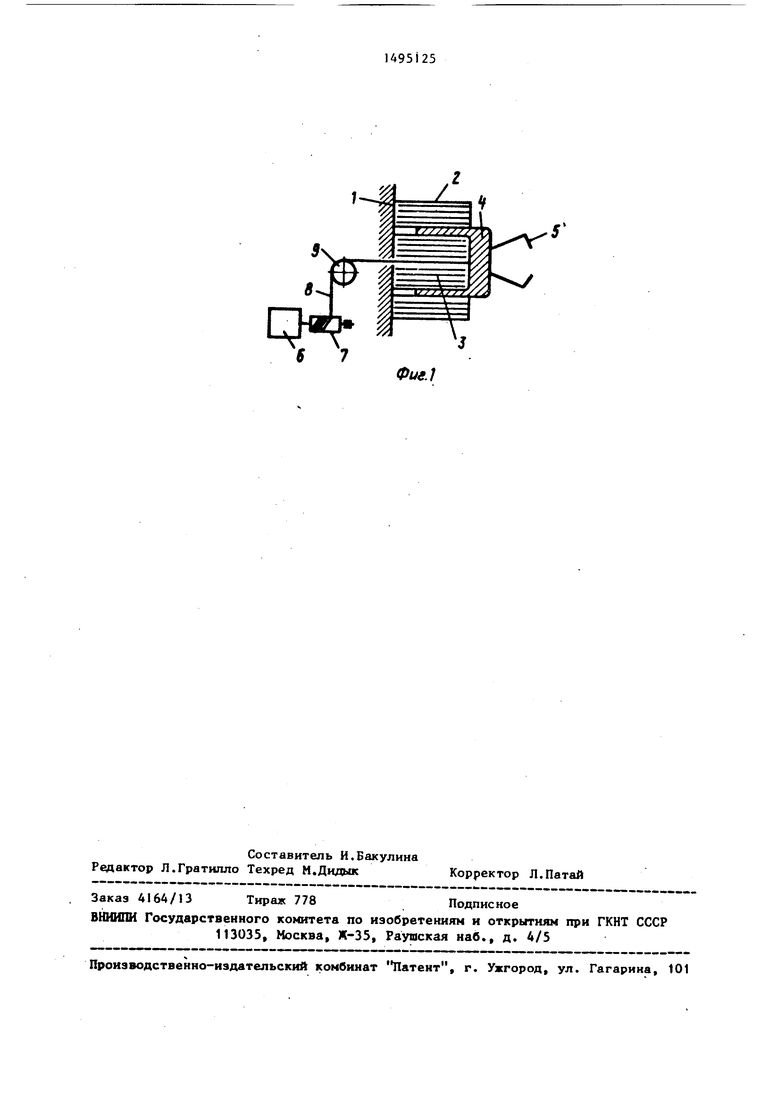
Изобретение относится к машиностроению ,в частности, к конструкциям манипуляторов, и может быть использовано при механизации производственных процессов в различных отраслях техники. Целью изобретения является увеличение грузоподъемности за счет повышения жесткости конструкции руки манипулятора в направлении, перпендикулярном оси руки манипулятора. Для этого на основании 1 одними концами прикреплены упругие элементы, выполненные в виде спиральных пружин сжатия 2 и 3. Спиральные пружины 2 и 3 расположены концентрично и имеют разное направление навивки. Свободные концы спиральных пружин 2 и 3 закреплены на фланце 4, к которому крепится схват 5. Привод осевого перемещения установлен на основании и посредством гибкой тяги 8 соединен с фланцем 4, причем гибкая тяга 8 размещена по оси руки манипулятора. 2 ил.
| Манипулятор | 1985 |
|
SU1256955A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
