Изобретение относится к машиностроению и может быть использовано при создании нромышленных роботов.
Цель изобретения - уменьшение динамических воздействий на кисть при знакопеременных нагрузках.
На фиг. 1 изображен робот, общий вид; на фиг. 2 - то же, вид сверху.
Устройство состоит из руки 1, на которой установлена кисть, выполненная в виде двуплечего рычага 2 с возможностью его поворота относительно вертикальной оси 3. На конце двуплечего рычага 2 установлен захват 4, а с противоположной стороны от захата 4 и оси поворота 3 установлен элемент торможения. Элемент торможения вы- полнен в виде инерционной массы 5. Кроме этого, на руке 1 установлено устройство 6 фиксации кисти относительно руки 1 при позиционировании.
Устройство работает следующим образом.
Перед началом перемещения руки 1 промышленного робота устройство 6 фиксации отключено, т. е. двуплечий рычаг 2 расфик- сирован относительно руки 1. При перемещении руки 1, например, в направлении X в момент разгона инерционная масса 5 за счет инерционности отстает от вертикальной оси 3 поворота и двуплечий рычаг 2 устанавливается вдоль направления X, причем захватом 4 вперед. Происходит ориентация захвата 4 в требуемом направлении. Перед торможением руки 1 при позиционировании включается устройство 6 фиксации, которое жестко фиксирует положение двуплечего рычага 2 относительно руки 1. Величина инерционной массы 5 и расстояние 1 поло
5
0
5 0
жения массы относительно вертикальной оси 3 поворота рассчитывается из условия заданного требуемого закона перемещения кисти промышленного робота.
Возможно перемещение инерционной массы вдоль двуплечего рычага 2 автоматически с помощью дополнительного приводного механизма (не показан). Перемещение инерционной массы 5 в процессе движения руки 1 расширяет возможность получить требуемые законы движения кисти руки 1 промыщленного робота.
Инерционная масса 5 представляет собой, например, приводной механизм захвата 4.
Формула изобретения
1.Промышленный робот, содержащий подвижную руку с установленной на последнем ее звене кистью, выполненной в виде подвижного звена с возможностью поворота на руке относительно вертикальной оси, отличающийся тем, что, с целью уменьшения динамических воздействий на кисть при знакопеременных нагрузках, он снабжен устройством фиксации кисти относительно вертикальной оси, смонтированным на подвижной руке .с возможностью взаимодействия с вертикальной осью, и кисть выполнена в виде двуплечего рычага, статически неуравновешенного относительно вертикальной оси, посредством установленной инерционной массы.
2.Промышленный робот по п. 1, отличающийся тем, что инерционная масса установлена с возможностью перемещения вдоль оси кисти.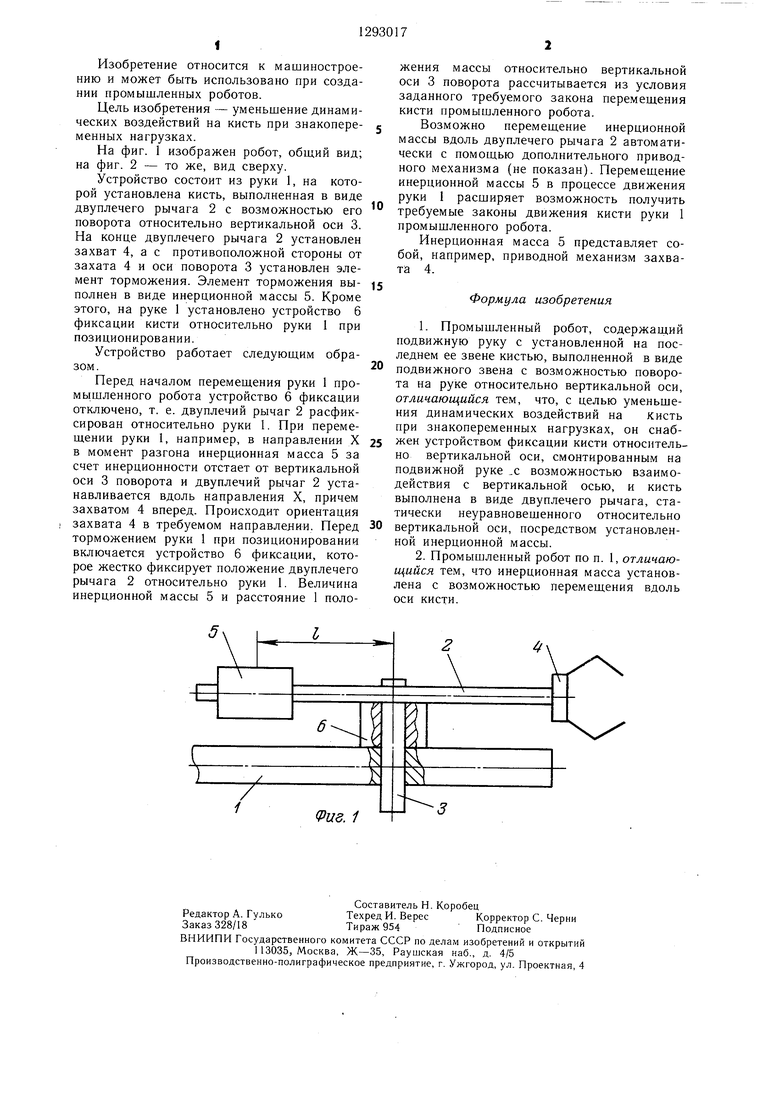
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Рука манипулятора | 1982 |
|
SU1166989A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Промышленный робот | 1985 |
|
SU1268254A1 |
| Промышленный робот | 1978 |
|
SU847617A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Манипулятор | 1978 |
|
SU727422A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| БЕЗОПАСНЫЙ МОТОРИЗОВАННЫЙ ШАРНИР, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ОСНАЩЕНИЯ ЧЕЛОВЕКОПОДОБНОГО РОБОТА | 2015 |
|
RU2669130C2 |
| Робот к листоштамповочному прессу | 1981 |
|
SU990502A1 |
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов. Цель изобретения - уменьшение динамических воздействий на кисть при знакопеременных нагрузках. Для этого при перемещении руки 1 в направлении оси X кисть руки, выполненная в виде двуплечего рычага 2, статически неуравновешенного относительно вертикальной оси 3, посредством инерционной массы 5 разворачивается по направлению оси X за счет инерционного взаимодействия массы 5 с рукой 1. 1 3. п. ф-лы, 2 ил. го со со Риг. 2
| Манипулятор | 1971 |
|
SU372885A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
