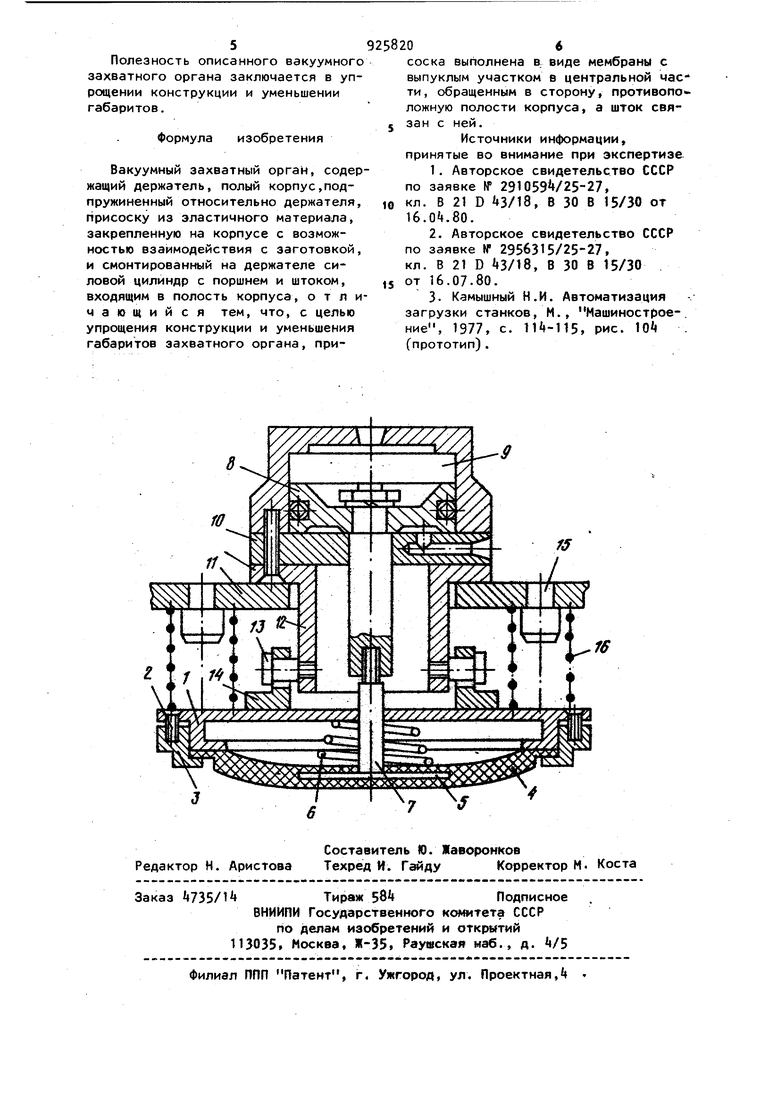
Изобретение относится к области механизации процессов обработки металлов и может быть использовано для захвата заготовок при подаче их в рабочую зону прессов. Известен вакуумный захватный орган, содержащий подвижный вдоль сво ей оси полый корпус с крышкой,расположенный в полости корпуса, подвижный вдоль его оси и подпружиненный относительно него шток с центральным отверстием, связывакиким полость ПРИСОСКИ с атмосферой, закрепленный на штоке клапан, перекрывающий це:нтральное отвеостие, снабженный Механизмом упоавления и выпо ненный в виде установленного перпен дикулярно к продольной оси штока валика с диаметральным отверстием, а механизм управления выполнен в ви храпового колеса, закрепленного на валике, и двух собачек, одна из которых шарнирно закреплена на корпусе с возможностью периодического взаимодействия с храповым колесом и подпружинена к штоку, другая шарнирно закреплена на штоке с возможностью взаимодействия с храповым колесом и подпружинена к нему fl}. Известное устройство недостаточно надежно в работе. Известен захватный орган, содержащий подвижный в направлении, перпендикулярном к поверхности захватываемой заготовки, держатель, подпружиненный относительно держателя полый корпус с присоской, расположенный в полости корпуса шток-поршень с центральным отверстием, связывающим полость присоски с атмосферой,механизм управления и механизм разгерметизации, включающий в себя прямой клапан, состоящий из корпуса и подпружиненного к нему поршня с центральным отверстием, и обратный клапан, состоящий из закрепленного на поршне корпуса и расположенного в нем подпружиненного шарика, перекрывающего центральное отверстие в поршне, а механизм управления выпол нен в виде неподвижного упора,расположенного над держателем, и датчи ка, закрепленного на держателе с возможностью взаимодействия с корпу сом захватного органа. Шток-поршень неподвижно закреплен на держателе, а корпус прямого клапана закреплен на держателе с возможностью взаимодействия корпуса обратного клапана с неподвижным упором 2. Известное устройство требует неподвижных упоров для разгерметизаци и жесткой опоры для создания вакуума, что ограничивает область при менения устройства. Ближайшим по совокупности сущест венных признаков и достигаемому эффекту является вакуумный захватны орган, содержащий держатель, полый корпус, подпружиненный относительно держателя и несущий взаимодействующую с заготовкой присоску из эластичного материала, втулку, установленную в держателе с возможностью перемещения относительно него, закрепленный на втулке силовой цилиндр с поршнем и штоком, которыми расположен во втулке и выполнен с центральным сквозным отверстием, связывающим полость присоски с атмосферой , закрепленный на штоке обратный клапан, перекрывающий отверстие, выполненное в корпусе ГЗ. Известный вакуумный захватный орган имеет сложную конструкцию и большие габариты. Целью изобретения является упрощение конструкции и уменьшение габаритов вакуумного захватного орган Поставленная цель достигается тем, что в вакуумном захватном органе, содержащем держатель, полый корпус, подпружиненный относительно держателя, присоску из эластичного материала, закрепленную на корпусе Возможностью взаимодействия с заготовкой, и смонтированный на держателе силовой цилиндр с поршнем и штоком, входящим в полость корпуса присоска выполнена в виде мембраны с выпуклым участком в центральной части, обращенным в сторону, противоположную полости корпуса, а штоксвязан с ней. На чертеже изображен вакуумный з ватный орган. Вакуумный захватный орган содержит корпус 1, на котором при помощи винтов 2 смонтирована обойма 3, прижимающая к корпусу эластичную присоску, выполненную в виде мембраны 4 с выпуклым участком в центральной части , обращенным в сторону,противоположную полости корпуса. В мембрану А вмонтированна жесткая пластина 5 (диск). Корпус 1 выполнен полым и в его полости установлена коническая пружина 6. В мембрану k вмонтирован один конец штока 7, проходящий через отверстие, выполненное в дне корпуса 1, а на другом конце штока закреплен поршень 8, расположенный в корпусе силового цилиндра 9 закрытого крышкой 10. На держателе 11 (плите) закреплена втулка 12, на которой установлены силовой цилиндр 9 и при помощи винтов 13 кронштейны 1. Кронштейны I закреплены на корпусе 1. На держателе 11 закреплены штифты 15,на которых установлены пружины 16,расположенные между держателем 11 и корпусом 1. Вакуумный захватный орган работает следующим образом. При ходе держателя 11 вниз мембрана k взаимодействует с листом (не показан). Включают силовой цилиндр 9. Поршень 8 перемещается вверх и через шток 7 втягивает мембрану k в полость корпуса 1, который удерживается от перемещения пружинами 1б. При прилегании наружной поверхности мембраны k к листу ее выпуклость исчезает и воздух полностью вытесняется из-под мембраны . При дальнейшем перемещении поршня 8 вверх 7 втягивает мембрану 4 в по лость корпуса 1, мембрана Ц пригибается, образуя полость, в каждой создается вакуум. Атмосферное давление прижимает лист к периферии (к краям) мембраны k. Держатель 11 перемещают вверх. Для опускания листа силовой цилиндр 9 переключают на реверсивное движение. При этом поршень 8 перемещается вниз вместе со штоком 7. Мембрана t под действием пружины 6 занимает исходное положение. Полость между листом и мембраной исчезает, вакуум нарушается и лист отделяется от диафрагмы. Затем цикл повторяется.
Полезность описанного вакуумного захватного органа заключается в упрощении конструкции и уменьшении габаритов.
Формула изобретения
Вакуумный захватный орган, содер жащий держатель, полый корпус,подпружиненный относительно держателя, присоску из эластичного материала, закрепленную на корпусе с возможностью взаимодействия с заготовкой, и смонтированный на держателе силовой цилиндр с поршнем и штоком, входящим в полость корпуса, о т л и чающийся тем, что, с целью упрощения конструкции и уменьшения габаритов захватного органа, при258206
соска выполнена в. виде мембраны с выпуклым участком в центральной час ти, обращенным в сторону, противоположную полости корпуса, а шток связан с ней.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке № 291059V25-27,
10 кл. В 21 D itS/lS, В 30 В 15/30 от 16.0.80.
2.Авторское свидетельство СССР по заявке № 2956315/25-27,
кл. В 21 D , В 30 В t5/30 ,5 от 16.07.80.
3 Камышный Н.И. Автоматизация загрузки станков, М., Машинострое-. ние, 1977, с. llt-115, рис. Ю . (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1982 |
|
SU1107937A1 |
| Вакуумный захватный орган | 1980 |
|
SU912617A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Устройство для маркировки этикеток | 1991 |
|
SU1781135A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ ОРГАН | 1972 |
|
SU342712A1 |
